A bit of fiddling with the Arduino PWM hardware can turn a white LED into a stroboscopic tachometer to chop smooth motion into chunks:

I was moving that pendant by hand and slight speed changes were easily visible:

IBMers of a certain era may recognize the test object; the rest of you can go there.
That’s a 10 mm warm-white LED with 5 parallel chips, running at about 100 mA from a 5 V supply, and driven from the same PWM channel and MOSFET that used to drive also drives the red channel of the RGB LED Mood Light:
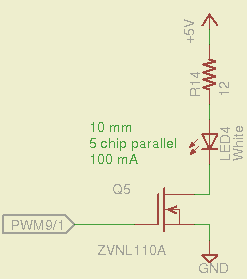
The ZVNL110A MOSFET has a 3 Ω drain resistance, which becomes a significant part of the resistance; you’d want a bigger, better, lower resistance MOSFET to wring more light out of the LED. In fact, I ran the LED from 12 V with the same resistor at a few hundred mA.
The reason you need more light is to make up for the minuscule duty cycle. In order to “stop motion”, you want a very short pulse; I picked a 100 μs pulse. At 50 Hz, that works out to a 0.5% duty cycle: not much light at 100 mA, but OK for a demo.
You can’t do this with the standard Arduino PWM setup, because it produces a constant frequency (about 488 Hz) and varies the duty cycle; we need a variable frequency with a constant pulse length. Because a stroboscope needs fine-grained control over the frequency, in order to stop the motion of rotating objects, it should run from one of the 16 bit Timer1 PWM outputs, which means either PWM9 or PWM10. Note that simply changing the timer’s clock prescaler as described there won’t suffice, because that gives very coarse control of the PWM frequency.
It’s probably worth noting that trying to do precise timing purely in software with, say, the millis() and micros() functions, produces terrible results…
The Arduino timer hardware includes control over both the period and the duration of the output pulses. The Fine Manual describes all the timer configuration registers starting on page 109; see that post for a push-pull PWM driver that formed the basis of this one.
Fast PWM (Mode 14) has some useful characteristics:
- Single-slope operation: timer counts only upward
- Output
PWM9goes high whenTCNT1resets to 0 - Output
PWM9goes low whenTCNT1=OCR1A TCNT1resets whenTCNT1=ICR1
The lowest possible output frequency occurs with ICR1 = 0xffff, so that Timer1 counts from 0x0000 to 0xffff before resetting (which, in that case, is indistinguishable from simply wrapping). The wrap period = ICR1 * tick period and the corresponding frequency = 1 / period.
The clock prescaler determines the overall range of Timer1 by setting the tick period. The Clock Select bit field can take on 6 useful, albeit widely separated, values (the other two select the external clock pin):
- 0 – stop timer
- 1 – prescale 1:1 = 62.5 ns tick → 244 Hz
- 2 – prescale 1:8 = 500 ns tick → 30 Hz
- 3 – prescale 1:64 = 4 μs tick → 3.8 Hz
- 4 – prescale 1:256 = 16 μs tick → 0.95 Hz
- 5 – prescale 1:1024 = 64 μs tick → 0.24 Hz
For my purposes, a lower limit around 4 Hz seemed about right. That means CS = 3, the prescaler runs at 1:64, and the timer ticks at 4 μs.
The frequency upper limit could be just under 1/(pulse width), which would produce a very high duty cycle. I arbitrarily set the limit to 1/(4 × pulse width), for a 25% duty cycle that works out to 1/(4 × 100 μs) = 2.5 kHz = 150 k flash/min. If you’re using very high current drive, then limit the duty cycle to prevent toasting the LED.
Because a strobe tach needs quick & easy adjustment, the encoder knob tweaks the pulse frequency in 1 Hz steps. Pushing the knob to close the shaft switch (if you have such a knob, of course, otherwise use another button; they all do the same thing here) reduces the step size to 0.01 Hz, which is more useful for fine tuning when you’re close to the goal. A real application requires better control over the numeric values (probably using integer values); I used floating point and simply ignored all the usual roundoff issues:
Stroboscope Tachometer Ed Nisley - KE4ZNU - December 2012 Frequency: 10.00 Pulse duration: 100 us Frequency: 11.00 Frequency: 12.00 Frequency: 13.00 Frequency: 14.00 Frequency: 14.01 Frequency: 14.02 Frequency: 14.02 Frequency: 14.02 Frequency: 14.01 Frequency: 14.00 Frequency: 13.98 Frequency: 13.97 Frequency: 13.97 Frequency: 13.96 Frequency: 13.94 Frequency: 13.93 Frequency: 14.93 Frequency: 15.93 Frequency: 16.94 Frequency: 17.94
Updating the counter period requires:
- Shut off interrupts to prevent interference with the high byte storage register
- Stop the timer:
CS=0 - Load the new upper limit in ICR1
- Force
TCNT1to be just belowIRC1to terminate the current pulse - Start the timer:
CS=3 - Enable interrupts again
You’d probably plunk that into a separate function in a real program…
Printing the frequency becomes a hassle without floating point formatting in printf(). It should appear on the character LED display, too. Optionally / additionally showing the value in rev/min would be very nice.
You’d want to increment the frequency by some reasonable fraction of the current value, perhaps rounded to 1 / 2 / 5 / 10 percent steps. Larger steps by pushbutton? Truncate the current value to a multiple of the step size?
You would also want some way to adjust the flash duration, but that’s definitely in the nature of fine tuning.
As it stands, a 100 μs pulse really does stop motion:

That’s a fan running at about 2500 rpm, with the LED flashing at 41.86 Hz. The camera exposure is 1/2 sec @ f/3.5, handheld, which means the camera integrated about 20 flashes. Ambient light accounts for the background blur: I boosted the grossly underexposed image right out of darkness. The square on the hub is retroreflective tape for a laser tachometer that verified the speed.
Yes, half a second handheld. The morning tea wears off during the day…
In round numbers, 41.86 Hz = 23.9 ms / rev. The fan diameter is 86 mm, so the blade tips travel 1.1 mm = (270 mm / 23.9 ms) × 100 μs during each flash. The tips seem slightly blurred when you (well, I) look very closely in real life, but I think this lashup worked pretty well right off the sketchpad.
The Arduino source code:
// Stroboscopic Tachometer
// Ed Nisley - KE4ANU - December 2012
//----------
// Pin assignments
const byte PIN_KNOB_A = 2; // knob A switch - must be on ext interrupt 2
const byte PIN_KNOB_B = 4; // .. B switch
const byte PIN_BUTTONS = A5; // .. push-close momentary switches
const byte PIN_STROBE = 9; // LED drive, must be PWM9 = OCR1A using Timer1
const byte PIN_PWM10 = 10; // drivers for LED strip, must turn these off...
const byte PIN_PWM11 = 11;
const byte PIN_SYNC = 13; // scope sync
//----------
// Constants
const int UPDATEMS = 10; // update LEDs only this many ms apart
#define TCCRxB_CS 0x03 // Timer prescaler CS=3 -> 1:64 division
const float TICKPD = 64.0 * 62.5e-9; // basic Timer1 tick rate: prescaler * clock
enum KNOB_STATES {KNOB_CLICK_0,KNOB_CLICK_1};
// ButtonThreshold must have N_BUTTONS elements, last = 1024
enum BUTTONS {SW_KNOB, B_1, B_2, B_3, B_4, N_BUTTONS};
const word ButtonThreshold[] = {265/2, (475+265)/2, (658+475)/2, (834+658)/2, (1023+834)/2, 1024};
//----------
// Globals
float FlashLength = 0.1e-3; // strobe flash duration in seconds
word FlashLengthCt = FlashLength / TICKPD; // ... in Timer1 ticks
float FlashFreq = 20.0; // strobe flash frequency in Hz
float FlashPd = 1.0 / FlashFreq; // ... period in sec
word FlashPdCt = FlashPd / TICKPD; // ... period in Timer1 ticks
float FreqIncr = 1.0; // default frequency increment
const float FreqMin = 4.0;
const float FreqMax = 1.0/(4.0*FlashLength);
volatile char KnobCounter = 0;
volatile char KnobState;
byte Button, PrevButton;
unsigned long MillisNow;
unsigned long MillisThen;
//-- Helper routine for printf()
int s_putc(char c, FILE *t) {
Serial.write(c);
}
//-- Knob interrupt handler
void KnobHandler(void)
{
byte Inputs;
Inputs = digitalRead(PIN_KNOB_B) << 1 | digitalRead(PIN_KNOB_A); // align raw inputs
// Inputs ^= 0x02; // fix direction
switch (KnobState << 2 | Inputs) {
case 0x00 : // 0 00 - glitch
break;
case 0x01 : // 0 01 - UP to 1
KnobCounter++;
KnobState = KNOB_CLICK_1;
break;
case 0x03 : // 0 11 - DOWN to 1
KnobCounter--;
KnobState = KNOB_CLICK_1;
break;
case 0x02 : // 0 10 - glitch
break;
case 0x04 : // 1 00 - DOWN to 0
KnobCounter--;
KnobState = KNOB_CLICK_0;
break;
case 0x05 : // 1 01 - glitch
break;
case 0x07 : // 1 11 - glitch
break;
case 0x06 : // 1 10 - UP to 0
KnobCounter++;
KnobState = KNOB_CLICK_0;
break;
default : // something is broken!
KnobCounter = 0;
KnobState = KNOB_CLICK_0;
}
}
//-- Read and decipher analog switch inputs
// returns N_BUTTONS if no buttons pressed
byte ReadButtons(int PinNumber) {
word RawButton;
byte ButtonNum;
RawButton = analogRead(PinNumber);
for (ButtonNum = 0; ButtonNum <= N_BUTTONS; ButtonNum++){
if (RawButton < ButtonThreshold[ButtonNum])
break;
}
return ButtonNum;
}
//------------------
// Set things up
void setup() {
pinMode(PIN_SYNC,OUTPUT);
digitalWrite(PIN_SYNC,LOW); // show we arrived
analogWrite(PIN_PWM10,0); // turn off other PWM outputs
analogWrite(PIN_PWM11,0);
analogWrite(PIN_STROBE,1); // let Arduino set up default Timer1 PWM
TCCR1B = 0; // turn off Timer1 for strobe setup
TCCR1A = 0x82; // clear OCR1A on match, Fast PWM, lower WGM1x = 14
ICR1 = FlashPdCt;
OCR1A = FlashLengthCt;
TCNT1 = FlashLengthCt - 1;
TCCR1B = 0x18 | TCCRxB_CS; // upper WGM1x = 14, Prescale 1:64, start Timer1
pinMode(PIN_KNOB_B,INPUT_PULLUP);
pinMode(PIN_KNOB_A,INPUT_PULLUP);
KnobState = digitalRead(PIN_KNOB_A);
Button = PrevButton = ReadButtons(PIN_BUTTONS);
attachInterrupt((PIN_KNOB_A - 2),KnobHandler,CHANGE);
Serial.begin(9600);
fdevopen(&s_putc,0); // set up serial output for printf()
printf("Stroboscope Tachometer\r\nEd Nisley - KE4ZNU - December 2012\r\n");
printf("Frequency: %d.%02d\nPulse duration: %d us\n",
(int)FlashFreq,(int)(100.0 * (FlashFreq - trunc(FlashFreq))),
(int)(1e6 * FlashLength));
MillisThen = millis();
}
//------------------
// Run the test loop
void loop() {
MillisNow = millis();
if ((MillisNow - MillisThen) > UPDATEMS) {
digitalWrite(PIN_SYNC,HIGH);
Button = ReadButtons(PIN_BUTTONS);
if (PrevButton != Button) {
if (Button == N_BUTTONS) {
// printf("Button %d released\n",PrevButton);
FreqIncr = 1.0;
}
else
// printf("Button %d pressed\n",Button);
// if (Button == SW_KNOB)
FreqIncr = 0.01;
PrevButton = Button;
}
if (KnobCounter) {
FlashFreq += (float)KnobCounter * FreqIncr;
KnobCounter = 0;
FlashFreq = constrain(FlashFreq,FreqMin,FreqMax);
FlashFreq = round(100.0 * FlashFreq) / 100.0;
FlashPd = 1.0 / FlashFreq;
FlashPdCt = FlashPd / TICKPD;
noInterrupts();
TCCR1B &= 0xf8; // stop Timer1
ICR1 = FlashPdCt; // set new period
TCNT1 = FlashPdCt - 1; // force immediate update
TCCR1B |= TCCRxB_CS; // start Timer1
interrupts();
printf("Frequency: %d.%02d\n",
(int)FlashFreq,(int)(100.0 * (FlashFreq - trunc(FlashFreq))));
}
digitalWrite(PIN_SYNC,LOW);
MillisThen = MillisNow;
}
}
That’s a grandiose name for a blinking LED, if I ever saw one…

Comments
6 responses to “Arduino Snippets: LED Stroboscopic Tachometer”
Neat project! However I’m still in the dark (aherm.) as to what the labyrinth-like object at the beginning is. Any clues please?
It’s the Maze of the Minotaur, with the jewel of knowledge at the center; the “Medieval labyrinth” illustration is pretty close to the same pattern. At least, that’s how I remember the IBM blurb: Mary picked the pendant as part of an award, back in the day.
The nominal 15-mA LEDs I’ve tested appear to asymptotically approach maximum brightness around 40-50 mA and aren’t perceptibly brighter at 100 mA. Are your LEDs noticeably brighter at 100 mA and higher?
You were dead right a couple of comment threads ago when you remarked that brightness is nowhere near linear with current, even in the nominal range.
The current-to-light conversion efficiency peaks around 20 mA, then drops as the current goes up, but the minimum isn’t much below 80% (more or less, kinda-sorta), so they should be only slightly dimmer than the straight-line relation would predict. Eyeballometrically, they’re as bright as they’d be with 20 mA DC, but eyeballs aren’t much good for that sort of measurement.
They do produce nice dashed lines during eye movements, though, which may be more important than raw brightness.
I should plot the actual light output against current; there’s a big photodiode somewhere in the heap.
Feels like a Circuit Cellar column comin’ on strong…
[…] thinking of taking strobe pictures again, but the results of the LED strobe tach experiment showed that I need many more LEDs, much brighter LEDs, or entirely different […]
[…] White LED to trigger a … […]