-
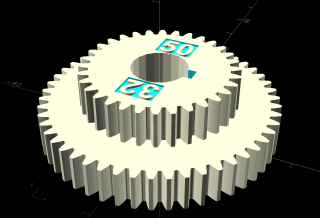
A 20-50-32-80 change gear train for a 100 TPI finish
-
One wrap of electrical tape smaller than another crevice tool of “the same size”.

-
The battery has become a Spicy Pillow

-
Heads-down projects that don’t produce continuous dopamine hits

-
To keep both gunk and worms out of the sump
-
The collets have tapers ranging from 20° to 35°