Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Seeing as how I’m in the midst of several long-attention-span, heads-down projects that don’t produce continuous dopamine hits, a cat picture must suffice for a few days:
Cat on deck
It’s neighborhood cat supervising rodents from the deck.
The crappy picture quality comes free with a phone camera zoomed entirely too tight.
An inch-long Praying Mantis stood guard on a carton delivered to the front door:
Praying Mantis – early instar
We hope to see many more of its kind.
Two views of a one-turn snail found on a lettuce leaf from the garden:
One-turn Snail – right side
One-turn Snail – left side
Mary has developed a Zero-Tolerance Policy for snails & slugs, so this one must start over again from the bottom of the food chain.
With sparrows excluded, the House Wrens eventually began setting up their second nest of the season, with the male proclaiming both he and his lady’s chosen nest are the best in the land:
House Wren – second nesting – 2026-06-30
House Wren – second nest – 2026-06-30
Wrens are on our Most Favored Critter list!
Previous encounters with their ancestors and relatives:
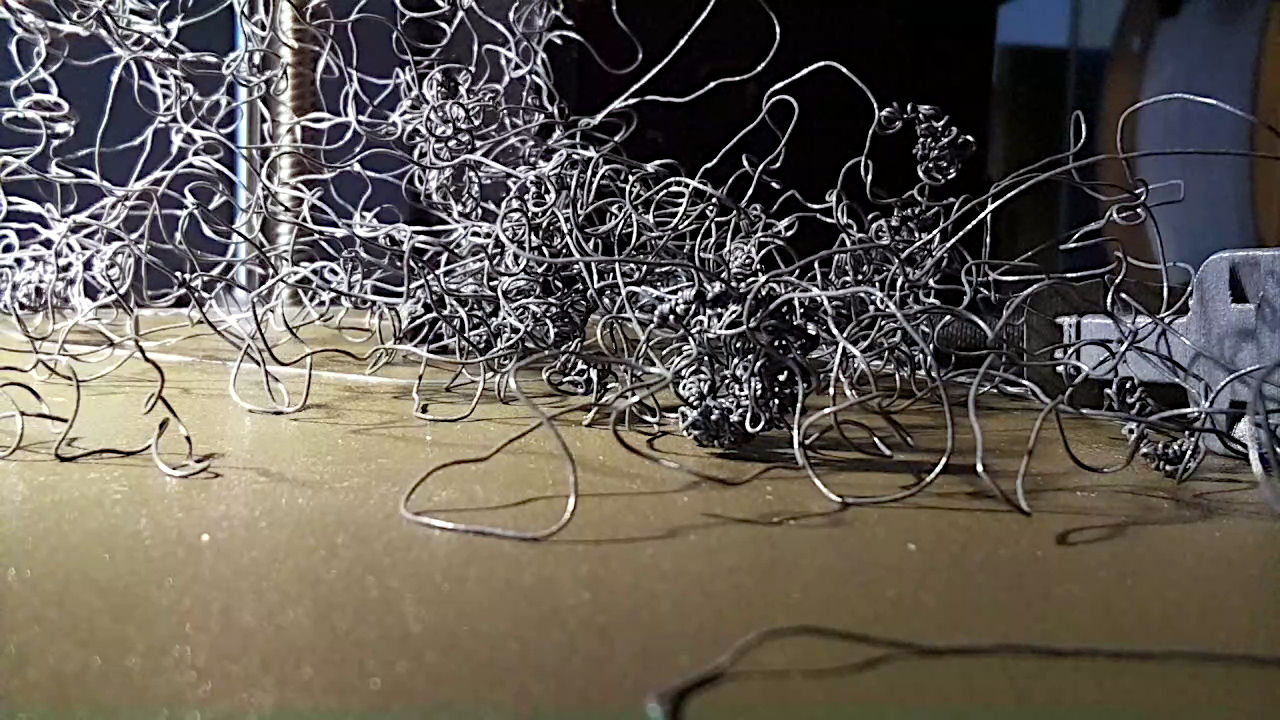
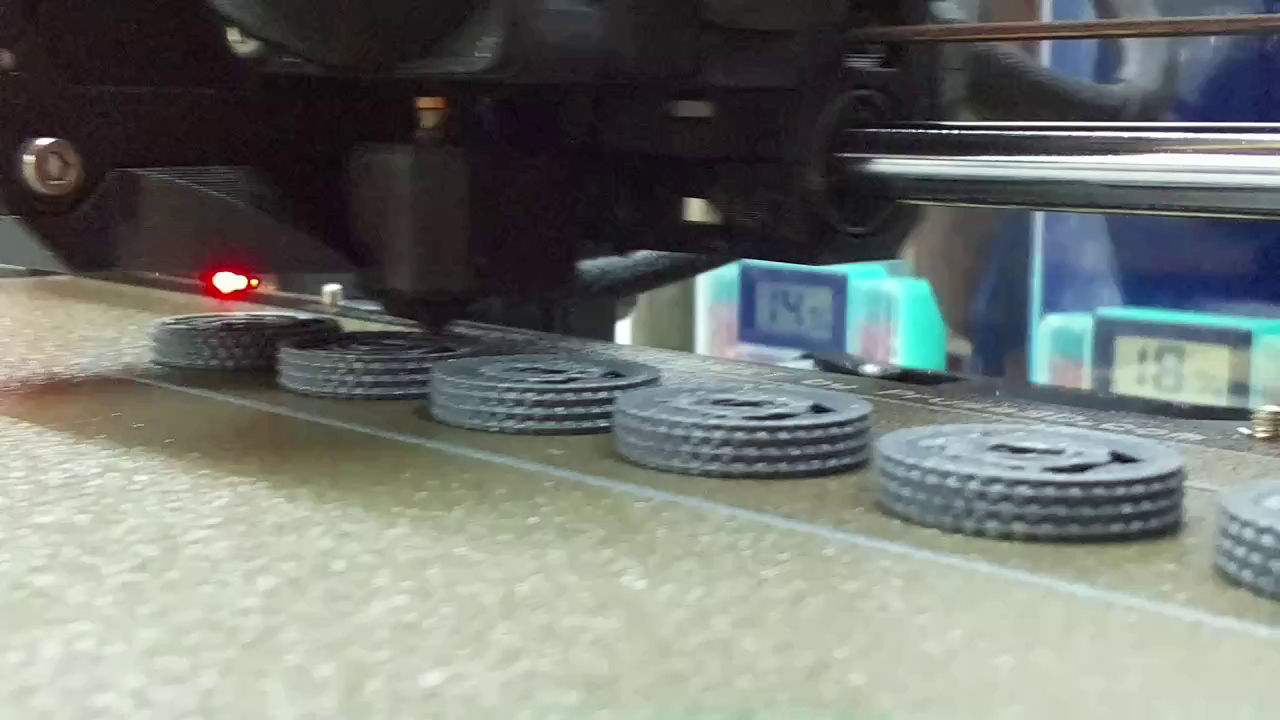
(The camera in the lower right doesn’t yet record videos, so you must imagine what I saw.) I forgot capturing this screenshot:
Prusa MK4 – Bird Nest – platform camera
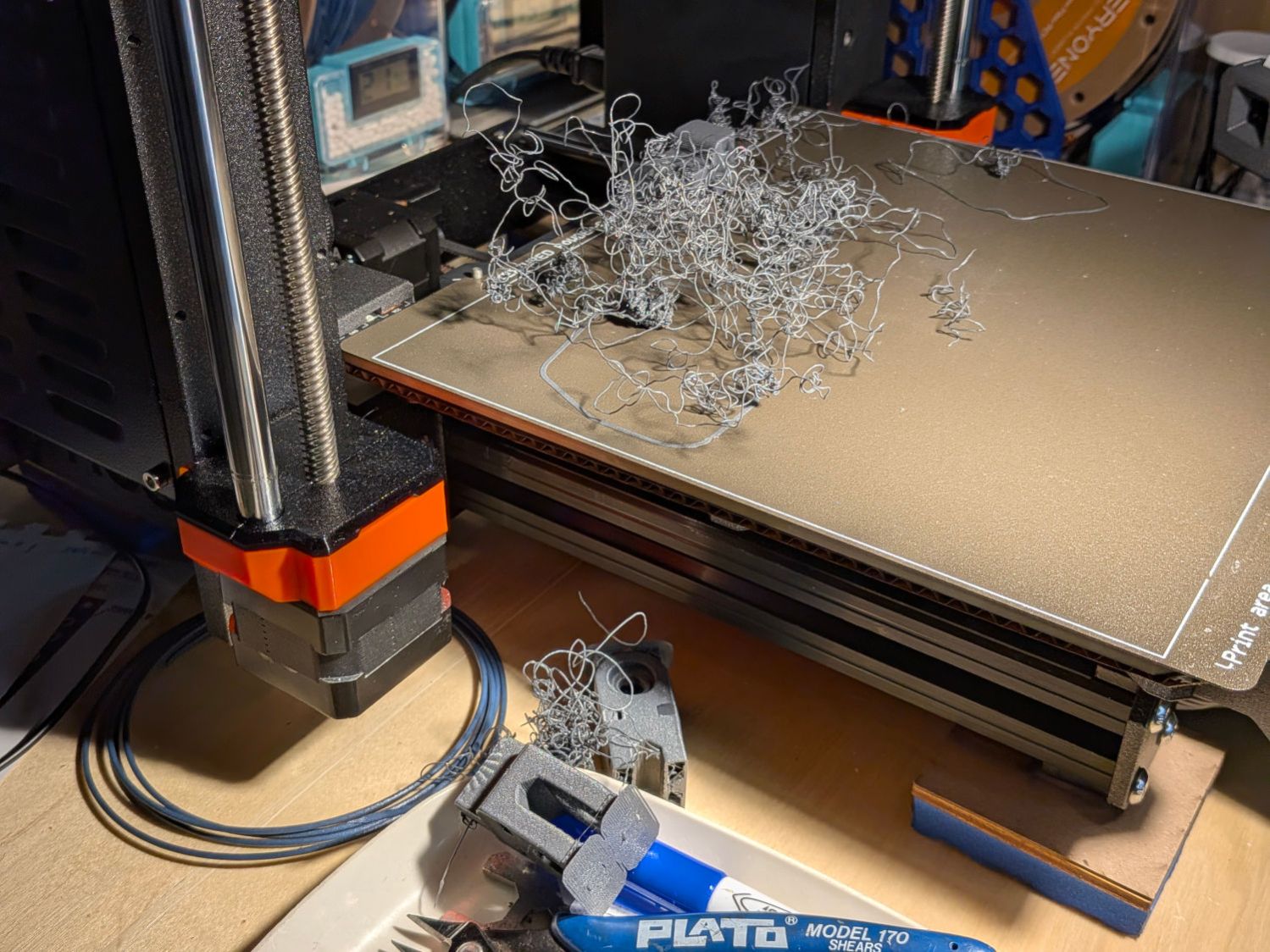
The nozzle was busily adding to the tangle, so I shut the printer off and trotted to the Basement Shop™ to find two more parts lying dead on the workbench:
Prusa MK4 – Bird Nest – B
This was entirely my fault, as I’d ignored PrusaSlicer’s warning about inadequate adhesion for the camera mount link standing in the corner:
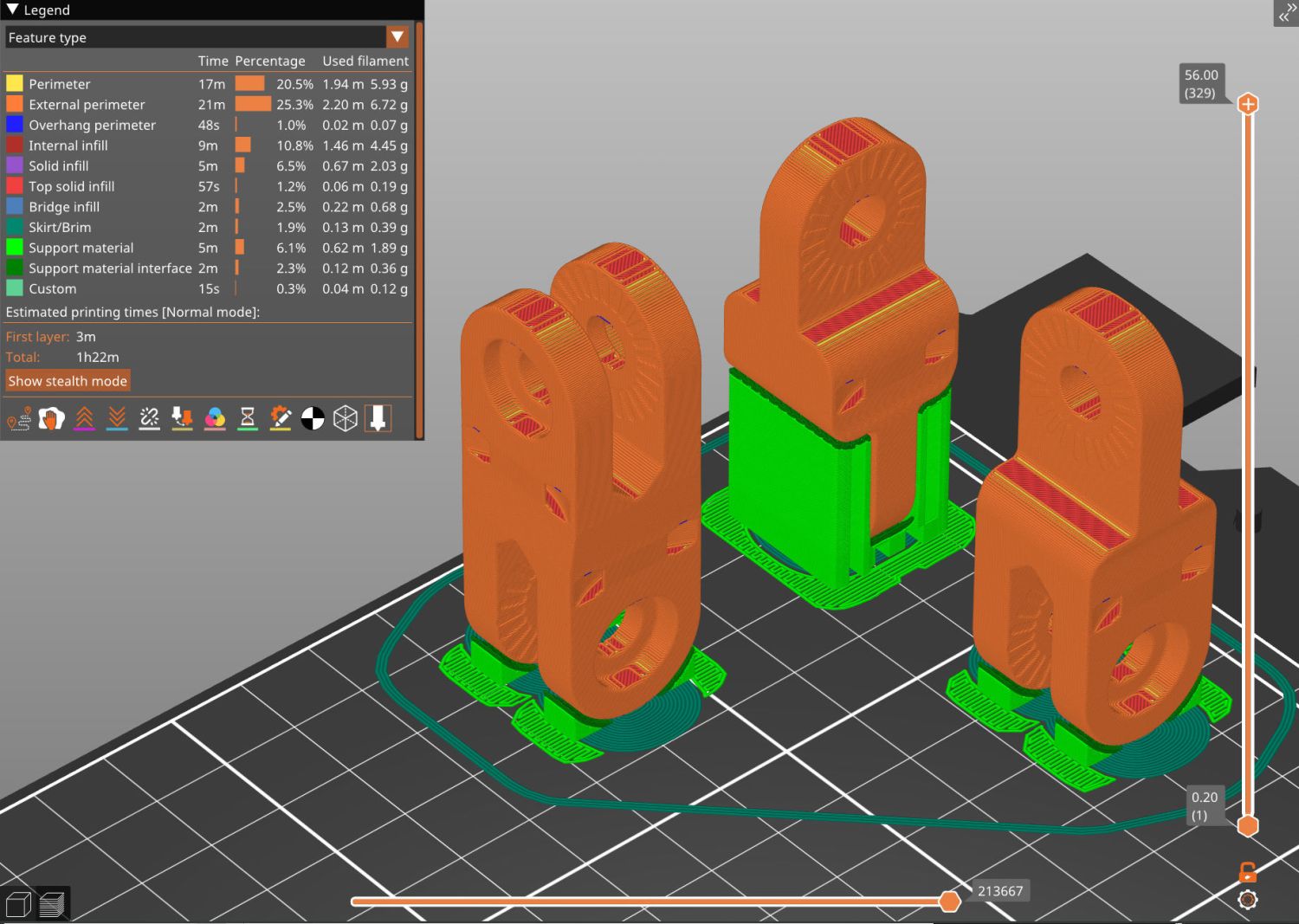
Prusa MK4 – Camera Mount Links – slicer preview
That’s the PrusaSlicer preview after adding a wider brim and painting more support structures on all three parts. Given larger footprints, the next attempt completed without drama, which is the normal outcome.
Moral of the story: Tall skinny parts need more surface area on the platform than you think, even with excellent adhesion.
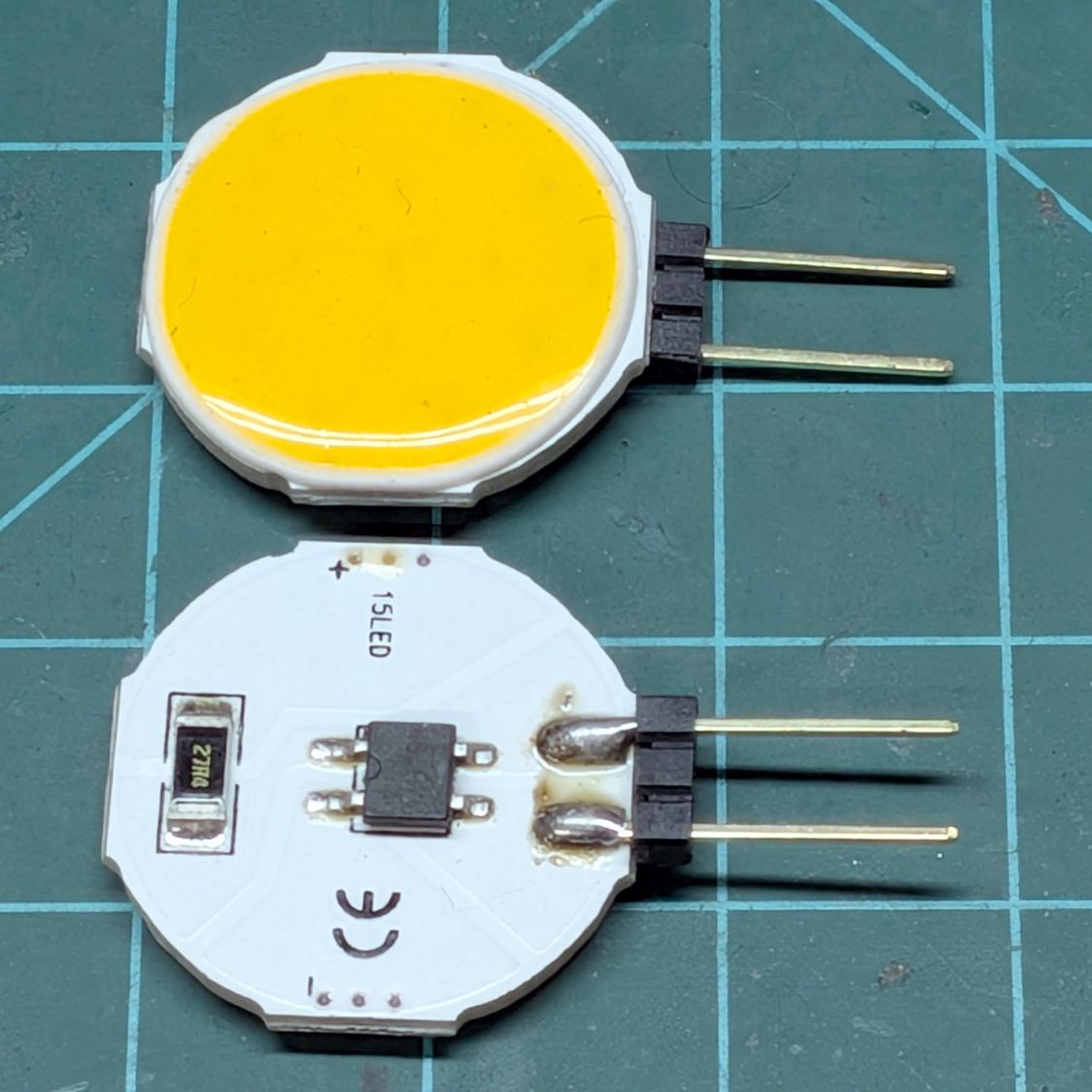
There’s also not much room for a lighting fixture on the printer where it must mount, so I modified a trio of nominally 12 V / 4 W COB LED panels:
Prusa MK4 – Extruder sidelight – COB LEDs
Their “4 W” rating seems aspirational, at best, as a 12 VDC supply pushes only 75 mA through the panel, so they tick along at 900 mW. If you expect cheap eBay / Amazon components to live up to their specs, dream on.
The modifications:
Unsolder the pins
Crunch off the surprisingly precise 27.4 Ω SMD resistor
Clean up the rubble
Wire the panels directly in series, ignoring their bridge rectifiers
The 15 LEDs on each panel are arranged in five parallel chains of three LEDs for a total forward drop of 8.3 V, so putting three panels in series works with the MK4’s 24 V power supply.
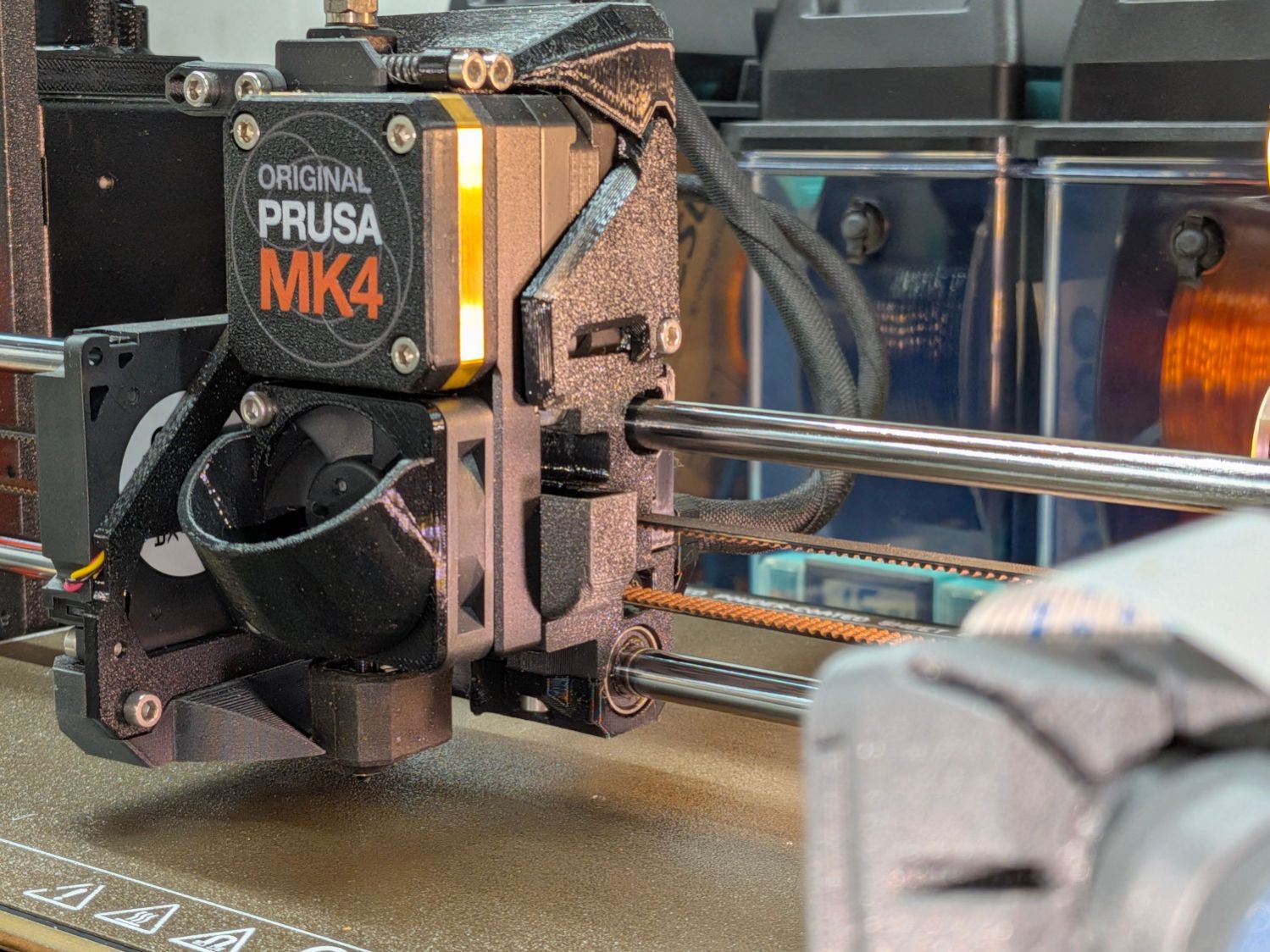
Stick them onto the MK4 power supply case with foam tape and wire them directly to the 24 V terminals:
Prusa MK4 – Extruder sidelight – installed
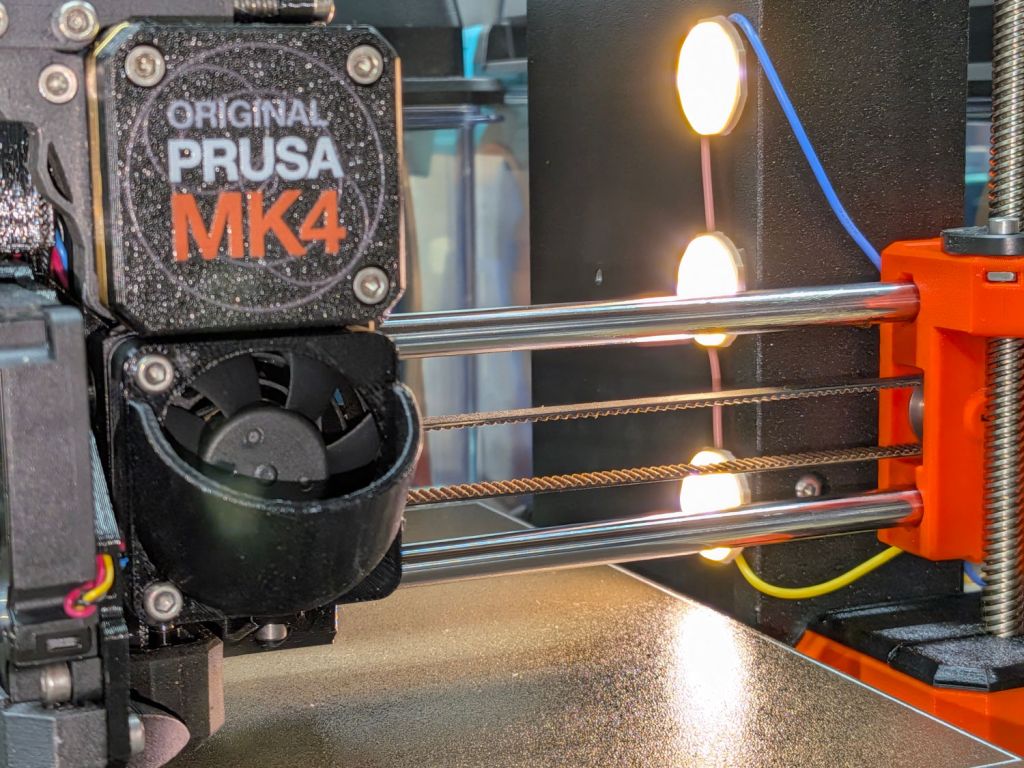
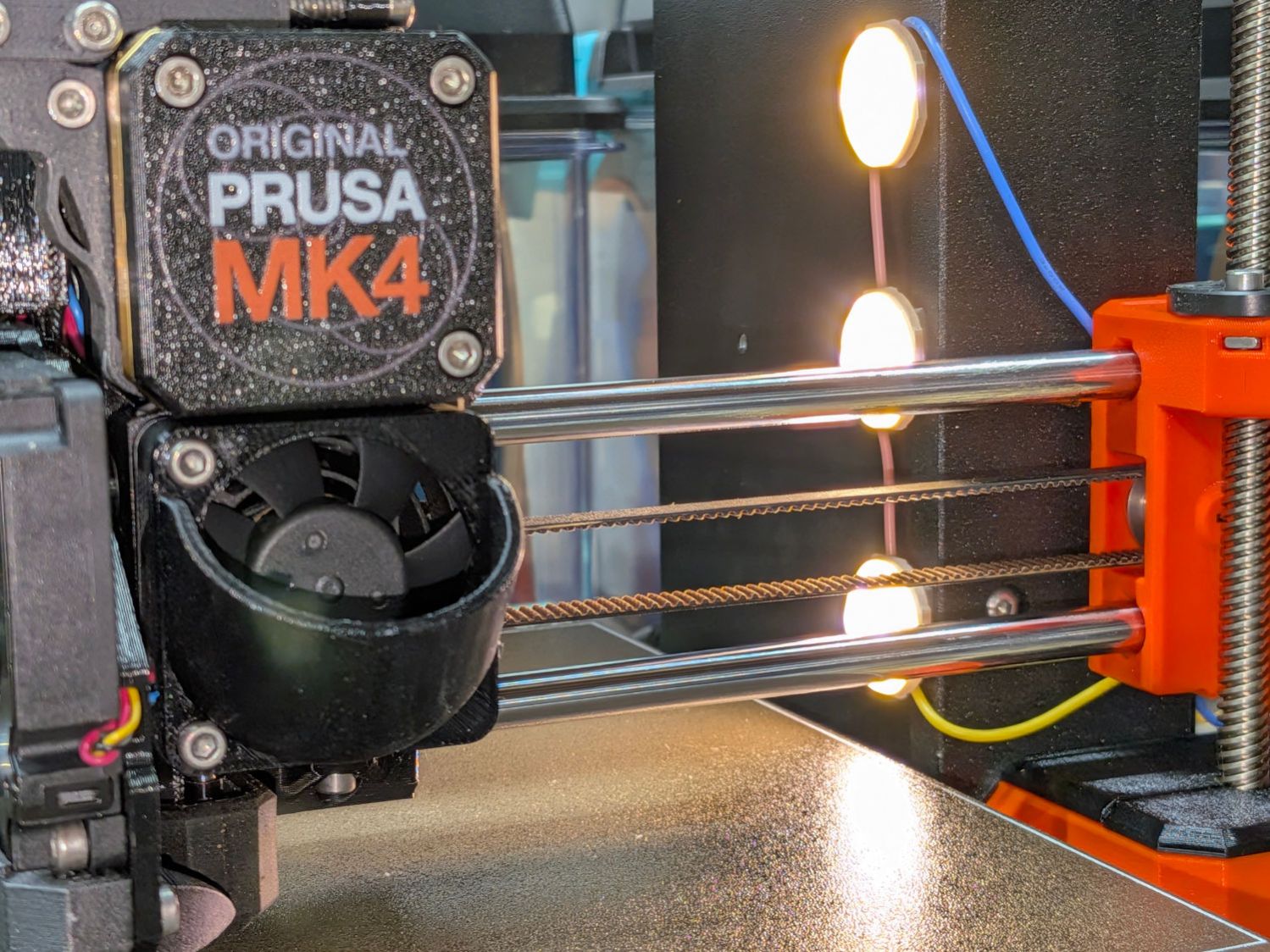
There’s very little clearance between the machine frame and the X Axis carriage on the threaded rod. Putting the LEDs in a 3D printed case and routing the wires lower on the column would be nice touches:
Prusa MK4 – Extruder sidelight – front view
The panels start at 30 mA when cold and drop to 25 mA as they warm up in the 63 °F = 17 °C Basement Shop. Each panel dissipates 250 mW: bright enough for the task, dim enough to avoid overpowering the camera’s limited dynamic range, and definitely within whatever power rating they should have.
Looking over the camera’s shoulder in normal shop lighting suggests it’s about right:
Although you’d want to set that up to run automagically when the RPi starts up, for now I just fire it off as needed through an SSH session, with the ampersand letting it run after that terminal session closes.
The RTSP port (5886) and stream (wrens) can be anything you like, which comes in handy when squirting streams through port-forwarded firewall pinholes using a router that cannot handle different external and internal port numbers.
The entrance hole was 1-½ inch ⌀, a bit larger than the 1 inch ⌀ preferred by wrens and entirely suitable for the pair of House Sparrrows who also took an interest in the property:
Bird House – sparrow inside
This led to considerable discussion and displays of outright hostility:
Bird House entrance reducer – wren vs sparrow
Sparrows and wrens disagree on nestbuilding materials, with the wrens hauling twigs into the box and sparrows hauling them back out again.
Because wrens have better PR agents than sparrows, I intervened by taking the box apart:
Bird House – nest base sticks
Although I realize that’s a lot of work for a small bird, I dumped the contents off the patio and set about reducing the entrance hole:
Bird House – interior cleared
Because birds aren’t too fussy about looks, I sawed off half an inch of 1 inch (ID) CPVC pipe and glued it in the hole:
Bird House entrance reducer – interior glue
The outside looks marginally better:
Bird House entrance reducer – exterior glue
The sparrows continued to approach the hole at full throttle, deploying landing gear and speed brakes at the last possible moment:
Bird House entrance reducer – sparrow approach
But they no longer fit through the hole and eventually gave up trying. The wrens resumed hauling twigs, although we’re not certain they’ll finish the project, as birds tend to build several partial nests before selecting the final one.
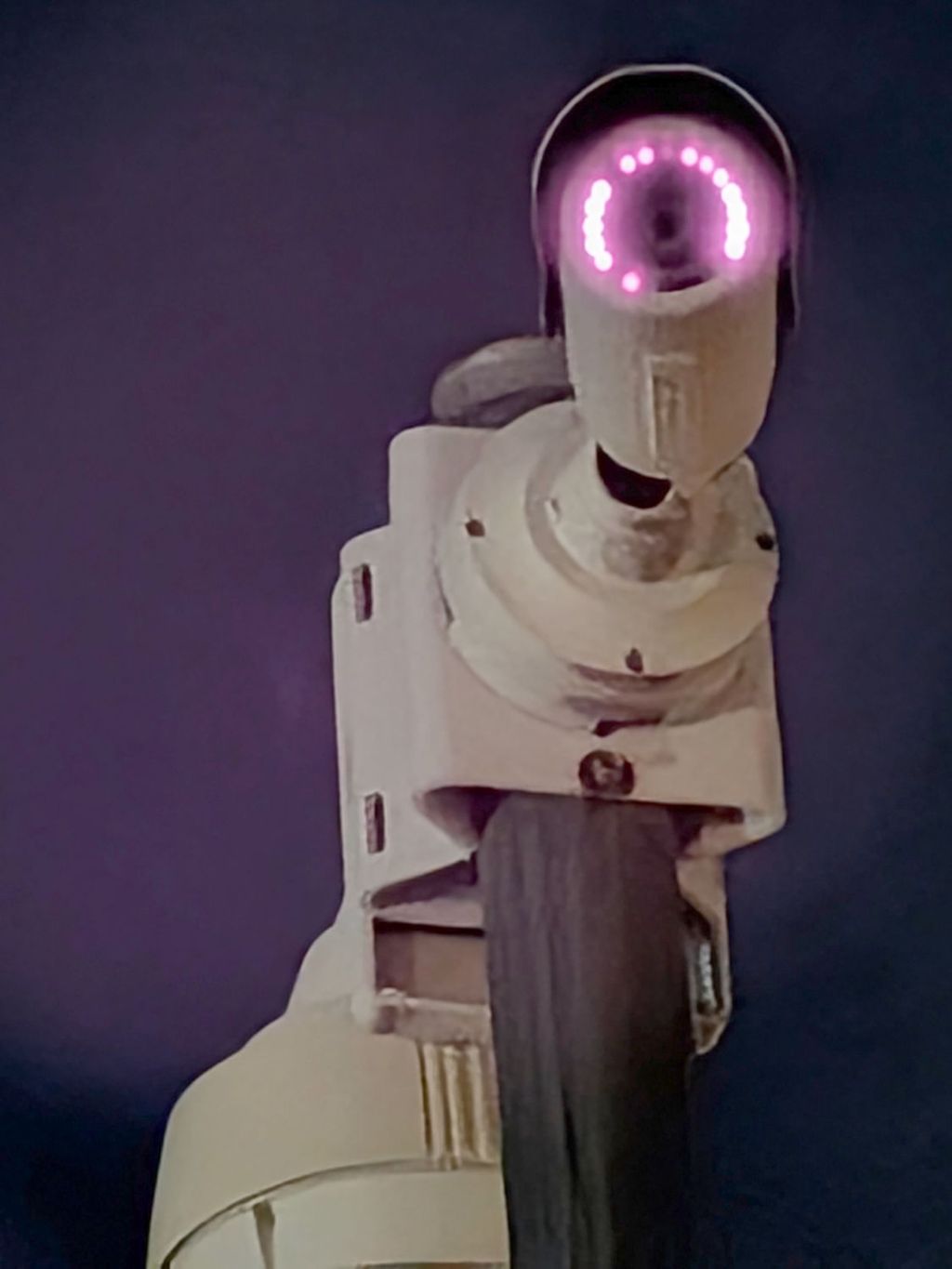
Under the plausible assumption the security / surveillance cameras along the Walkway Over the Hudson aren’t the cheapest junk available from a randomly named Amazon seller, this came as a surprise during a recent Walkway At Night stroll:
Walkway Over the Hudson – camera LEDs
The IR LEDs emit just enough red light to be dimly visible to the human eye, but appear much brighter to a silicon detector. I think the long gap at the bottom right is a sensor of some sort, so the array of 18 LEDs has two deaders, one near death, and six more fading away.