Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Although you’d want to set that up to run automagically when the RPi starts up, for now I just fire it off as needed through an SSH session, with the ampersand letting it run after that terminal session closes.
The RTSP port (5886) and stream (wrens) can be anything you like, which comes in handy when squirting streams through port-forwarded firewall pinholes using a router that cannot handle different external and internal port numbers.
While setting up a Raspberry Pi camera, I had occasion to pull out its USB power cable, whereupon grabbing the camera while unscrewing it from the tripod felt unusually sharp:
Micro-B USB – RPi jack
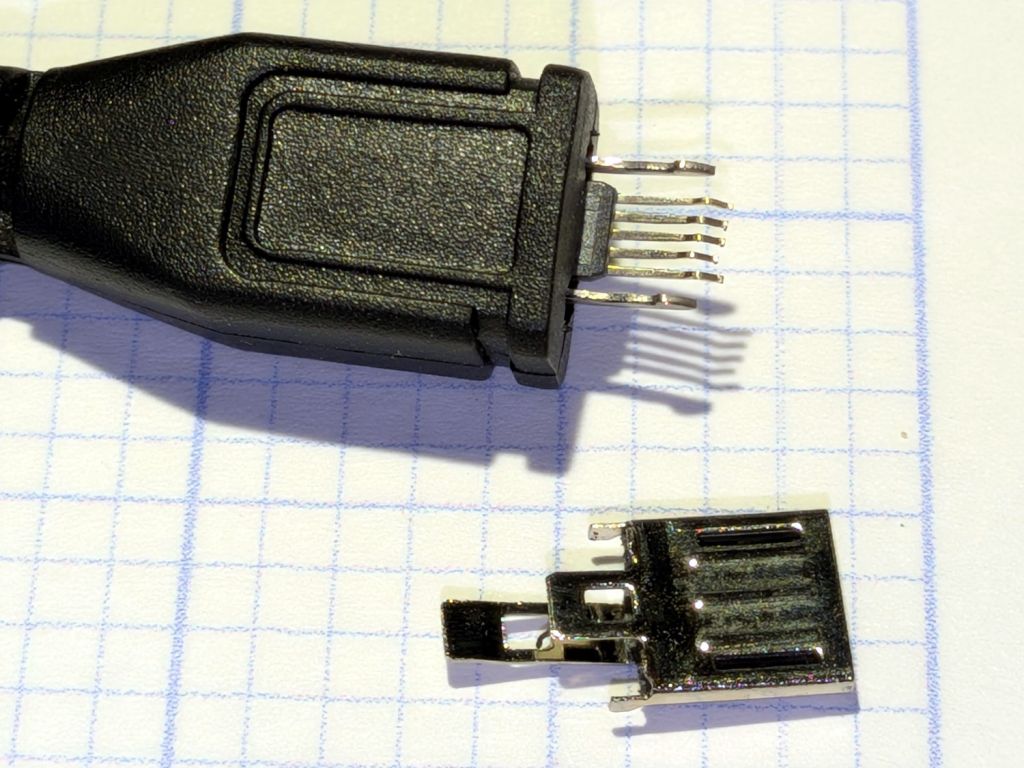
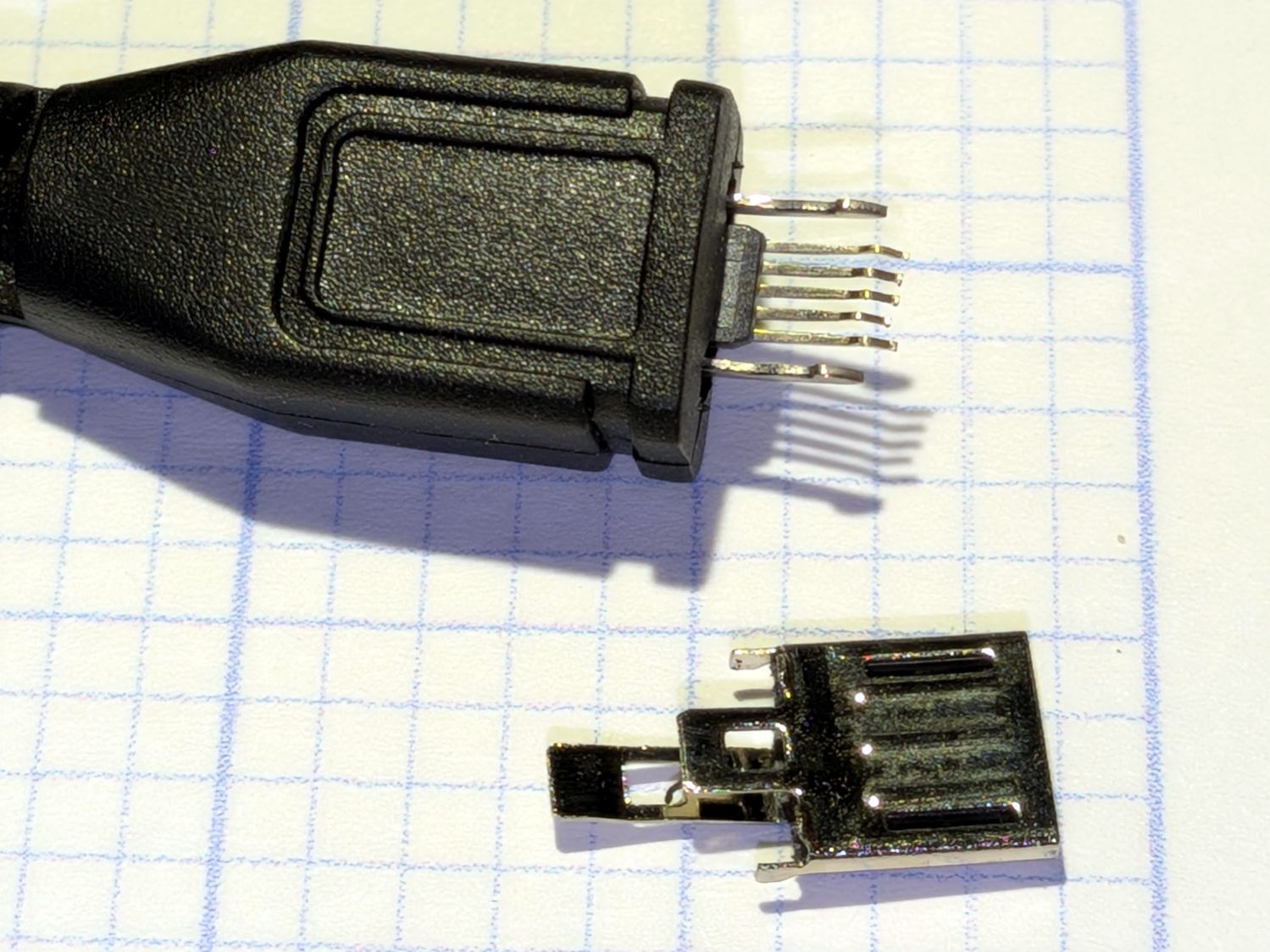
It seems the wall wart’s USB Micro-B connector pulled apart:
Micro-B USB connector – disembowled
Somewhat to my surprise, it was a CanaKit 5 V 2.5 A wall wart, definitely not the cheapest piece of junk ever made by the hand of man. On the other paw, it’s been around for quite a while, so …
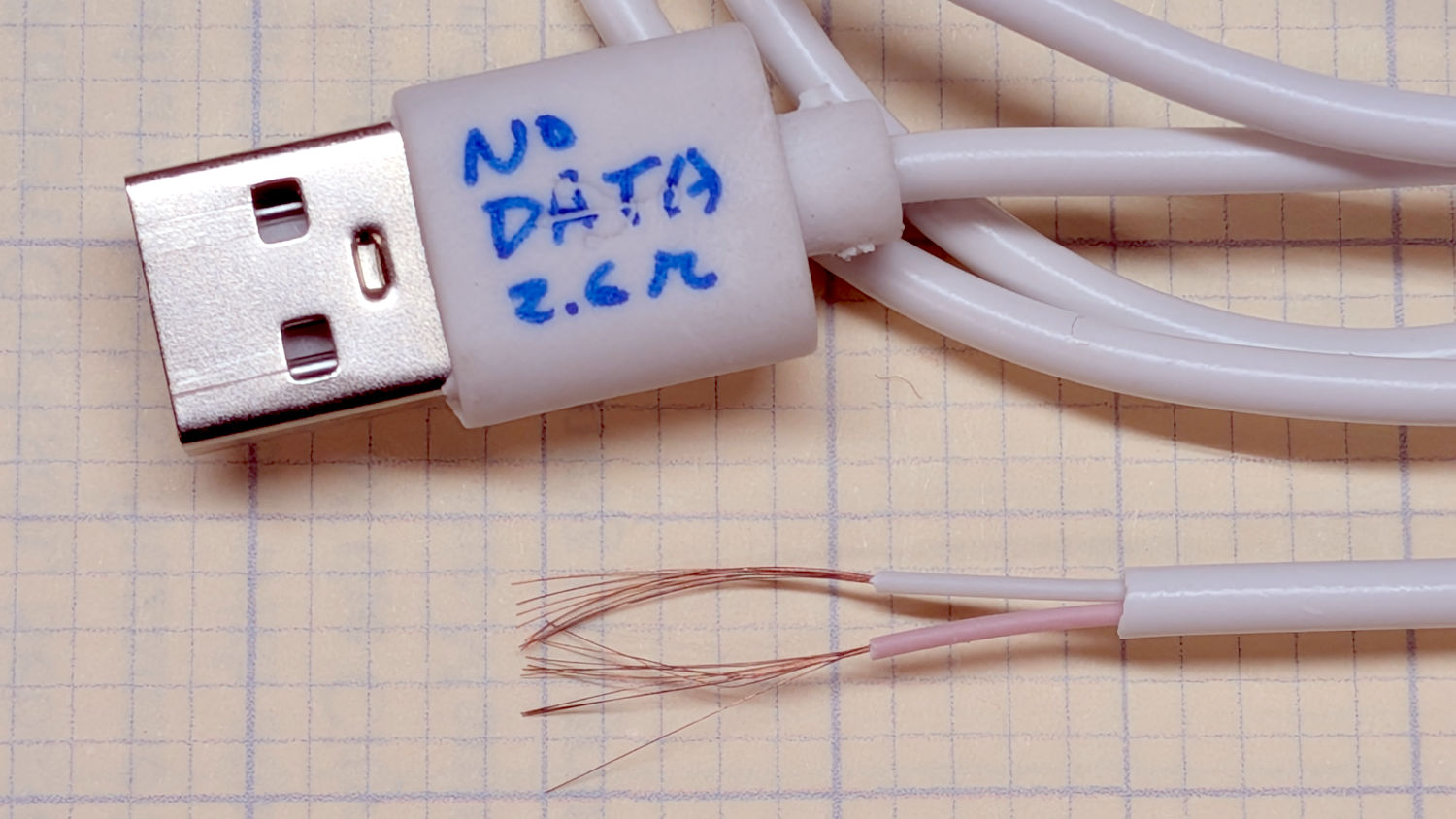
Even I will agree that’s not a repairable failure, so I planned to splice in a Micro-B connector from a volunteer chosen from the Box o’ USB Micro-B Cables:
Each of those conductors appears to be made up of nine springy copper-colored 0.06 mm strands, somewhat smaller than 40 AWG: not what you want on the business end of a 2.5 A wall wart. I had previously measured the cable’s overall resistance with a surprisingly useful Treedix USB Cable Tester and it was on the very high end of the charge-only cable collection.
So I soldered a female USB-A breakout from the Drawer o’ USB Breakouts to the wall wart’s wires, snapped a 3D printed case around it, got a good (0.26 Ω) A-to-Micro-B cable from the Box o’ USB Adapters, and moved on.
A bedroom rearrangement displaced the Dell Sound Bar attached to the streaming music player from its accustomed perch, so I conjured a mount from the parts bin to hang it from a shelf:
Dell sound bar mount – installed
The sound bar originally fit below any Dell monitor with the appropriate lugs under the bezel, but a bit of bandsaw work and hand filing produced a reasonable facsimile from an aluminum sheet:
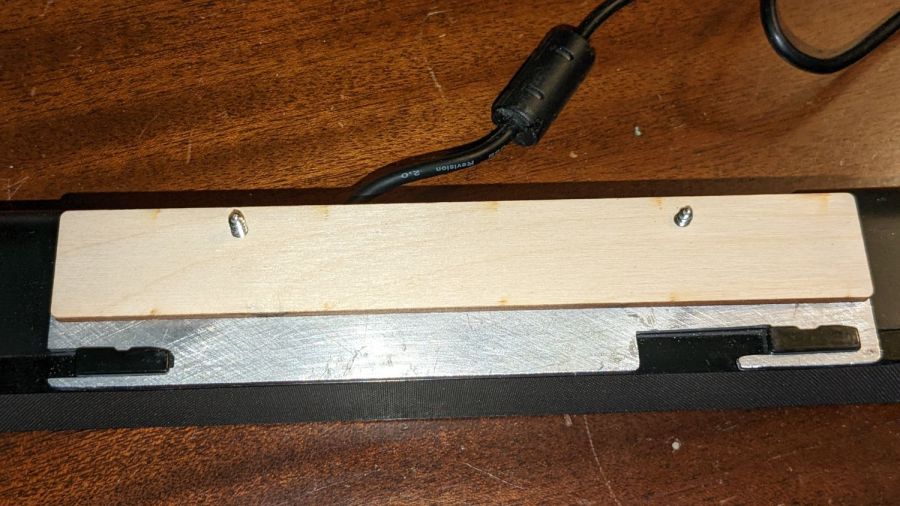
Dell sound bar mount – plate installed
The bar’s plastic bits require a few millimeters of clearance above the sheet, now provided by a matching plywood shape:
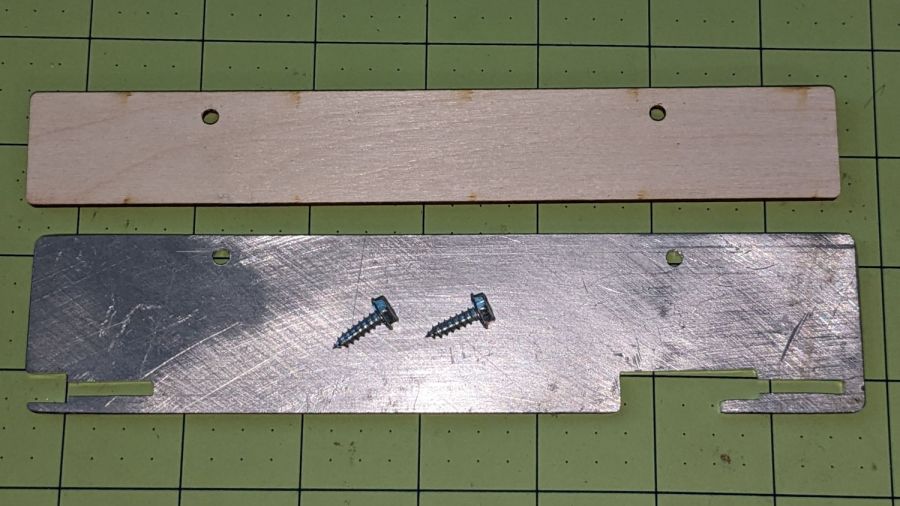
Dell sound bar mount – parts
A trial fit showed all the parts would fly in formation:
Dell sound bar mount – trial fit
A laser-cut cardboard template maintained alignment and spacing while I stood on my head screwing the mount in place.
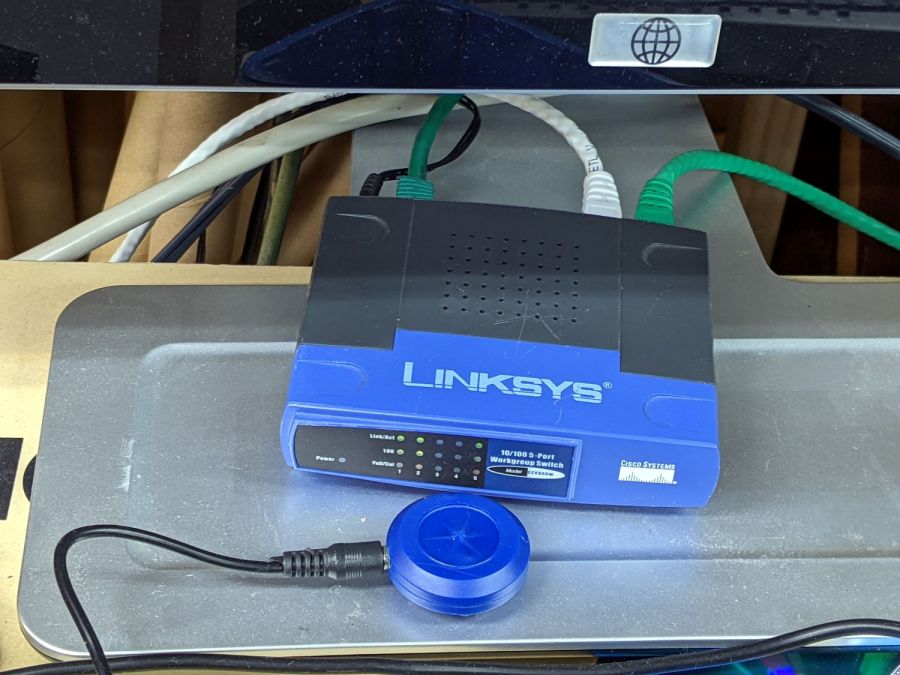
The CNC-3018XL and MPCNC machines each have a Raspberry Pi feeding G-Code into an Arduino clone controlling the stepper motors. The former grew a USB WiFi interface in place of its internal WiFi hardware when it seemed to have difficulty connecting to the house router, while the latter pretty much worked. Of late, however, I’ve been trying to reduce the number of WiFi devices cluttering the airwaves, with the result of wiring both machines to an old Ethernet switch from the Box o’ Network Stuff:
LinkSys Switch for CNC machines
The blue puck is the KVM button to select one of the machines for the keyboard / mouse / monitor on the bench.
One key point I generally screw up: the WiFi IP address cannot become the wired IP address without rebooting everything else on the network. Instead, just change the IP addresses and be done with it.
Collecting all the pieces in one place:
Disable the both internal WiFi hardware and Bluetooth in /boot/config.txt, thereby eliminating the need to force the WiFi down in /etc/rc.local:
One of the streaming media players behaved funny, which always results in a numeric keypad battery replacement. This AmazonBasics AAA alkaline was down to about 0.5 V and long past its best-used-by date:
Suggestions that Amazon monitors their Marketplace sellers to figure out what’s profitable, then promote a Good Enough house brand product to kill off the competition, seem to describe the situation just about perfectly.
After about a year of streaming music, the music died over the course of a month, producing progressively bizarre symptoms on all the local Icecast stations. Killing the streaming server and yanking all the USB memory sticks produced this tableau:
USB Memory – streamer failures
The USB 2.0 32 GB SanDisk Cruzer Fit (tiny, black, upper left) holds images from various network cameras and is not involved with music. It’s nigh onto seven years old and, apparently, still going strong.
The USB 2.0 Centron (gray-and-retroreflective, upper right) was forgotten from the last time I set up a drive for our Forester’s player. There’s another one just like it in the car; they’re impossibly old, as you’d expect from their minuscule size.
The USB 3.0 64 GB Samsung Fit (small, white, lower left) is totally dead, to the extent it doesn’t even announce its presence when plugged into a USB socket. It’s 2.5 years into a five year warranty, but their new USB 3.1 version is twelve bucks; Samsung wins. It formerly contained an extensive selection of public-domain music.
The 64 GB Sandisk Cruzer (huge, black, lower right) suffered some serious damage:
sudo mount -o ro /dev/sdg1 /mnt/part
ll /mnt/part
ls: cannot access '/mnt/part/PILZ': Input/output error
total 384K
drwxr-xr-x 6 ed users 4.0K Nov 28 2019 ./
drwxr-xr-x 17 root root 4.0K Jun 7 2019 ../
-rw-r--r-- 1 ed ed 215K Mar 9 2019 CDClassical.m3u
drwxrwxr-x 56 ed ed 4.0K Mar 9 2019 Classical/
drwx------ 2 root root 16K Mar 9 2019 lost+found/
d????????? ? ? ? ? ? PILZ/
drwxrwxr-x 116 ed ed 12K Mar 9 2019 Pop/
-rw-r--r-- 1 ed ed 117K Nov 28 2019 Pop.m3u
It still contains a fair amount of music ripped from the CDs we’ve collected over the decades, but it’s obviously unusable. Just for fun, I tried reformatting and copying some files to it, but it eventually hard-crashed with I/O errors:
[37787.872410] usb 2-1: new high-speed USB device number 2 using xhci_hcd
[37788.013027] usb 2-1: New USB device found, idVendor=0781, idProduct=5530, bcdDevice= 1.00
[37788.013030] usb 2-1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[37788.013032] usb 2-1: Product: Cruzer
[37788.013034] usb 2-1: Manufacturer: SanDisk
[37788.013036] usb 2-1: SerialNumber: 4C530001151215101233
[37788.013604] usb-storage 2-1:1.0: USB Mass Storage device detected
[37788.014778] scsi host9: usb-storage 2-1:1.0
[37789.033409] scsi 9:0:0:0: Direct-Access SanDisk Cruzer 1.00 PQ: 0 ANSI: 6
[37789.034569] sd 9:0:0:0: [sdf] 120225792 512-byte logical blocks: (61.6 GB/57.3 GiB)
[37789.035820] sd 9:0:0:0: [sdf] Write Protect is off
[37789.035825] sd 9:0:0:0: [sdf] Mode Sense: 43 00 00 00
[37789.036137] sd 9:0:0:0: [sdf] Write cache: disabled, read cache: enabled, doesn't support DPO or FUA
[37789.086533] sdf: sdf1
[37789.089418] sd 9:0:0:0: [sdf] Attached SCSI removable disk
[38035.071013] EXT4-fs (sdf1): mounting ext3 file system using the ext4 subsystem
[38035.183172] EXT4-fs (sdf1): mounted filesystem with ordered data mode. Opts: (null)
[38485.302549] usb 2-1: reset high-speed USB device number 2 using xhci_hcd
[38490.622285] usb 2-1: device descriptor read/64, error -110
[38506.195617] usb 2-1: device descriptor read/64, error -110
[38506.425616] usb 2-1: reset high-speed USB device number 2 using xhci_hcd
[38511.742339] usb 2-1: device descriptor read/64, error -110
<<< snippage >>>
[38548.845743] usb 2-1: USB disconnect, device number 2
[38548.858925] blk_update_request: I/O error, dev sdf, sector 99556320 op 0x1:(WRITE) flags 0x4800 phys_seg 30 prio class 0
[38548.858933] EXT4-fs warning (device sdf1): ext4_end_bio:309: I/O error 10 writing to inode 1531939 (offset 0 size 0 starting block 12444541
)
[38548.858937] Buffer I/O error on device sdf1, logical block 12444284
[38548.858944] EXT4-fs warning (device sdf1): ext4_end_bio:309: I/O error 10 writing to inode 1531939 (offset 0 size 0 starting block 12444542
)
<<< snippage >>>
[38548.858984] Buffer I/O error on device sdf1, logical block 12444293
[38548.859034] blk_update_request: I/O error, dev sdf, sector 99017520 op 0x1:(WRITE) flags 0x4000 phys_seg 3 prio class 0
[38548.859158] blk_update_request: I/O error, dev sdf, sector 99556560 op 0x1:(WRITE) flags 0x4800 phys_seg 30 prio class 0
[38548.859224] blk_update_request: I/O error, dev sdf, sector 99017760 op 0x1:(WRITE) flags 0x4000 phys_seg 2 prio class 0
[38548.859237] blk_update_request: I/O error, dev sdf, sector 99018000 op 0x1:(WRITE) flags 0x4000 phys_seg 2 prio class 0
>>
[38549.230765] JBD2: Detected IO errors while flushing file data on sdf1-8
[38549.230920] Aborting journal on device sdf1-8.
[38549.231008] Buffer I/O error on dev sdf1, logical block 1545, lost sync page write
[38549.231011] JBD2: Error -5 detected when updating journal superblock for sdf1-8.
[38549.231325] Buffer I/O error on dev sdf1, logical block 0, lost sync page write
[38549.231332] EXT4-fs (sdf1): I/O error while writing superblock
[38549.231333] EXT4-fs error (device sdf1): ext4_journal_check_start:61: Detected aborted journal
[38549.231334] EXT4-fs (sdf1): Remounting filesystem read-only
<<< and so forth and so on >>>
The Icecast streaming server reads data continuously from the USB sticks and, given that I set up half a dozen “stations”, there’s plenty of reading going on. The drives are formatted as ext3 and mounted with the noatime option, so there shouldn’t be any writing going on, but it seems a year of constant reading can kill a USB drive.
Fortunately, the original data lives elsewhere, with scripts to copy the appropriate files to the right places, so rebuilding the drives on a pair of new USB sticks wasn’t a big deal.
According to the Arducam doc, their Motorized Focus Camera has a 54°×41° field of view, (roughly) equivalent to an old-school wide(-ish) angle 35 mm lens on a 35 mm still camera. For my simple purposes, the camera will be focused on objects within maybe 200 mm:
Arducam Motorized Focus Camera – desktop test range
The numeric keys are 6.36 mm = ¼ inch tall, the function keys are 5.3 mm tall, and the rows are 10 to 11 mm apart.
The focusing equation converting distance to lens DAC values depends critically on my crude measurements, so the focus distance accuracy isn’t spot on. Bonus: there’s plenty of room for discussion about where the zero origin should be, but given the tune-for-best-picture nature of focusing, it’s good enough.
I set the CANCEL legend at 50 mm and it’s in good focus with the lens set to that distance:
Arducam Motorized Focus Camera – 50 mm
Focusing at 55 mm sharpens the ON key legend, while the CANCEL legend remains reasonably crisp:
Arducam Motorized Focus Camera – 55 mm
Adding another 5 mm to focus at 60 mm near the front of the second row shows the DoF is maybe 15 mm total:
Arducam Motorized Focus Camera – 60 mm
Focusing at 65 mm, near the middle of the second row, softens the first and fourth rows. Both of the middle two rows seem OK, making the DoF about 20 mm overall:
Arducam Motorized Focus Camera – 65 mm
Jumping to 100 mm, near the top of the first function row:
Arducam Motorized Focus Camera – 100 mm
At 150 mm, about the top of the far row just under the display:
Arducam Motorized Focus Camera – 150 mm
I think 200 mm may be the far limit of useful detail for a 5 MP camera:
Arducam Motorized Focus Camera – 200 mm
At 300 mm the DoF includes the mug at 600 mm, but the calculator keyboard is uselessly fuzzy:
Arducam Motorized Focus Camera – 300 mm
At 500 mm, the mug becomes as crisp as it’ll get and the text on the box at 750 mm is entirely legible:
Arducam Motorized Focus Camera – 500 mm
At 1000 mm, which is basically the edge of the desk all this junk sits atop, the mug and text become slightly fuzzy, so the DoF doesn’t quite reach them:
Arducam Motorized Focus Camera – 1000 mm
I limited the focus range to 1500 mm, which doesn’t much change the results:
Arducam Motorized Focus Camera – 1500 mm
I could focus-stack a set of still images along the entire range to get one of those unnatural everything-in-focus pictures.