Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
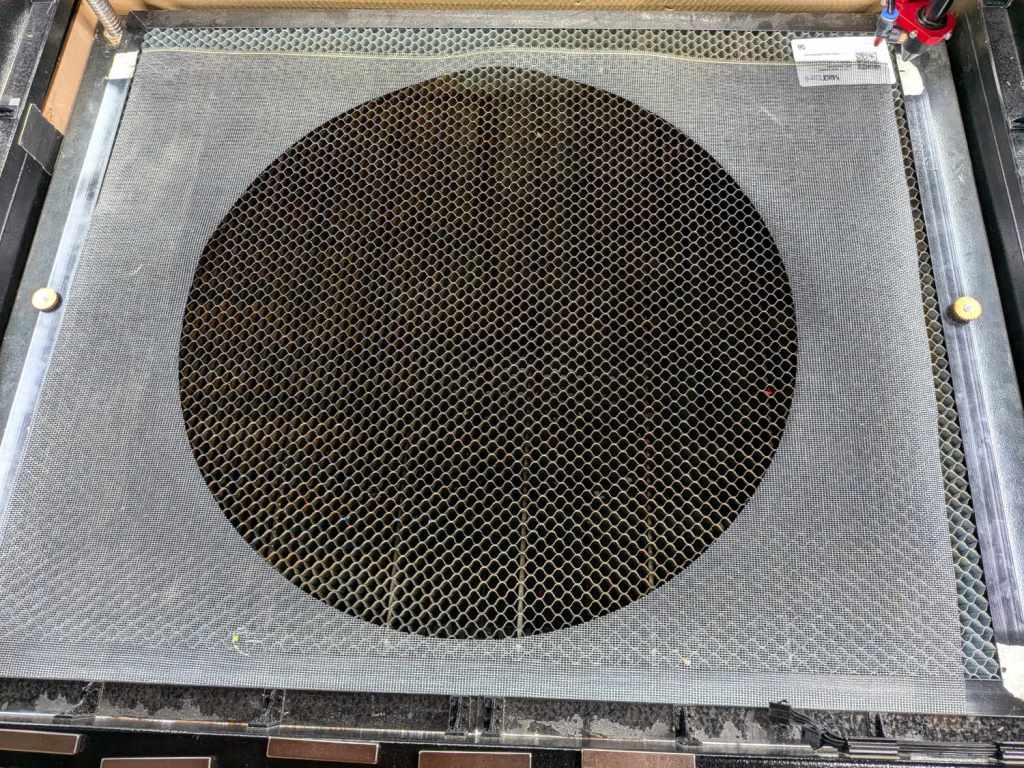
Having just cleaned a bunch of gunk out of the bottom of the worm bin, we decided to try a layer of window screen to keep both gunk and worms out of the sump.
A roll of window screen Came With The House™, minus label or provenance, that felt like some sort of plastic, perhaps with a glass core.
The bin has a 19-¼ inch = 488 mm ID with 10 thin support struts around the perimeter. Laying out a circle and cutting it accurately by hand seemed like a chore, even though the screen cut easily with ordinary scissors.
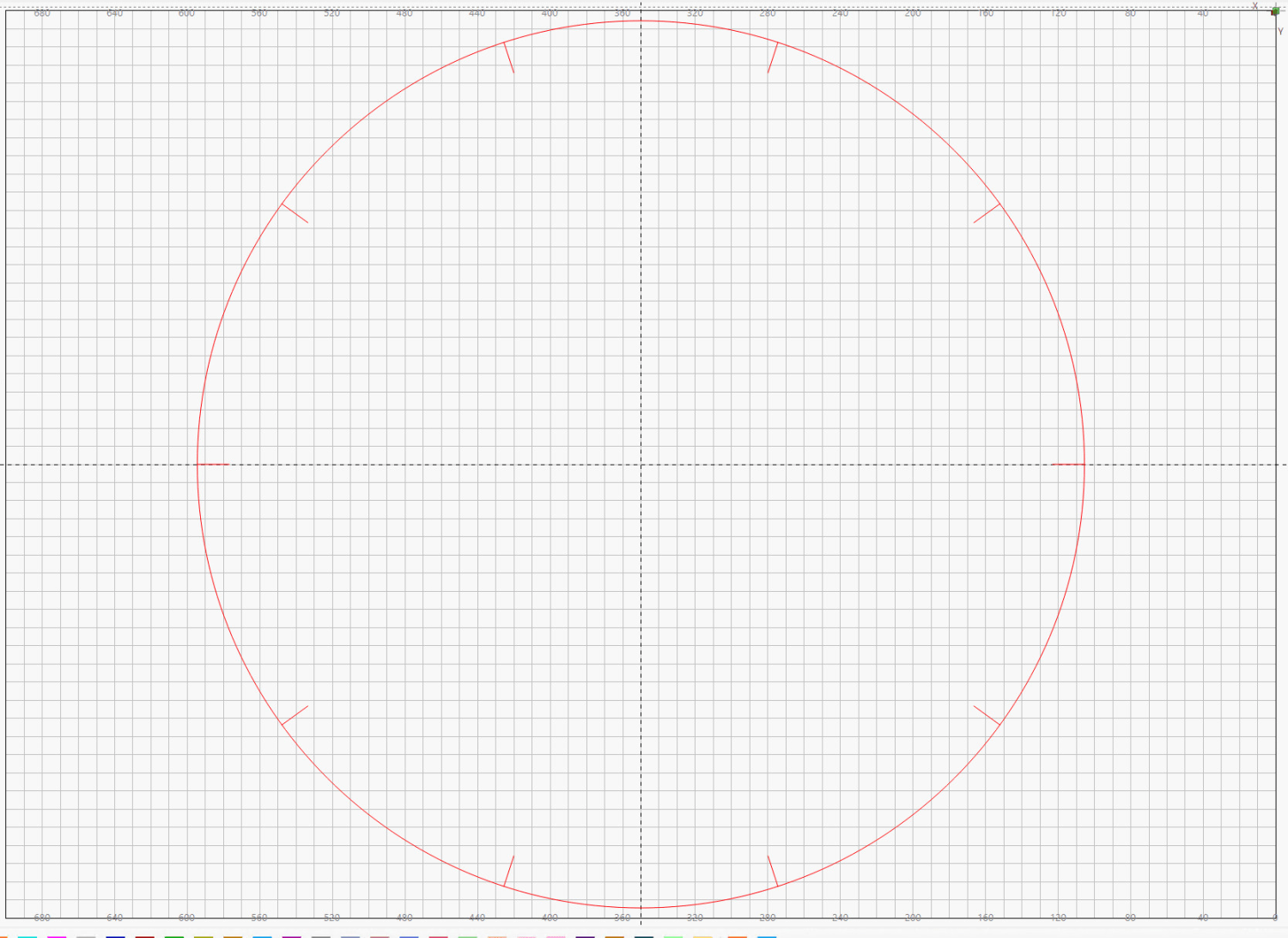
The diameter just barely fit on the laser’s 700×500 mm platform, so I laid it out in LightBurn:
Laser-cut window screen – LightBurn layout
For lack of anything smarter, I applied the same setting as for the faucet gasket material (30 mm/s at 25% of 60 W) and Fired The Laser.
As far as I could tell while the laser was trundling around the circle, absolutely nothing happened other than maybe burning off a coating with a little discoloration on either side of the path.
However, the circle lifted out with zero drama:
Laser-cut window screen
And was a perfect fit in the worm bin.
Color me surprised!
I have no pictures of the happy results, as all this happened in the few minutes between “We should try a screen”, dropping the cut screen in place, and reassembling the bin.
I think the screen would cut just as well with a higher speed. If the screen works and we need another, I’ll run a few tests first.
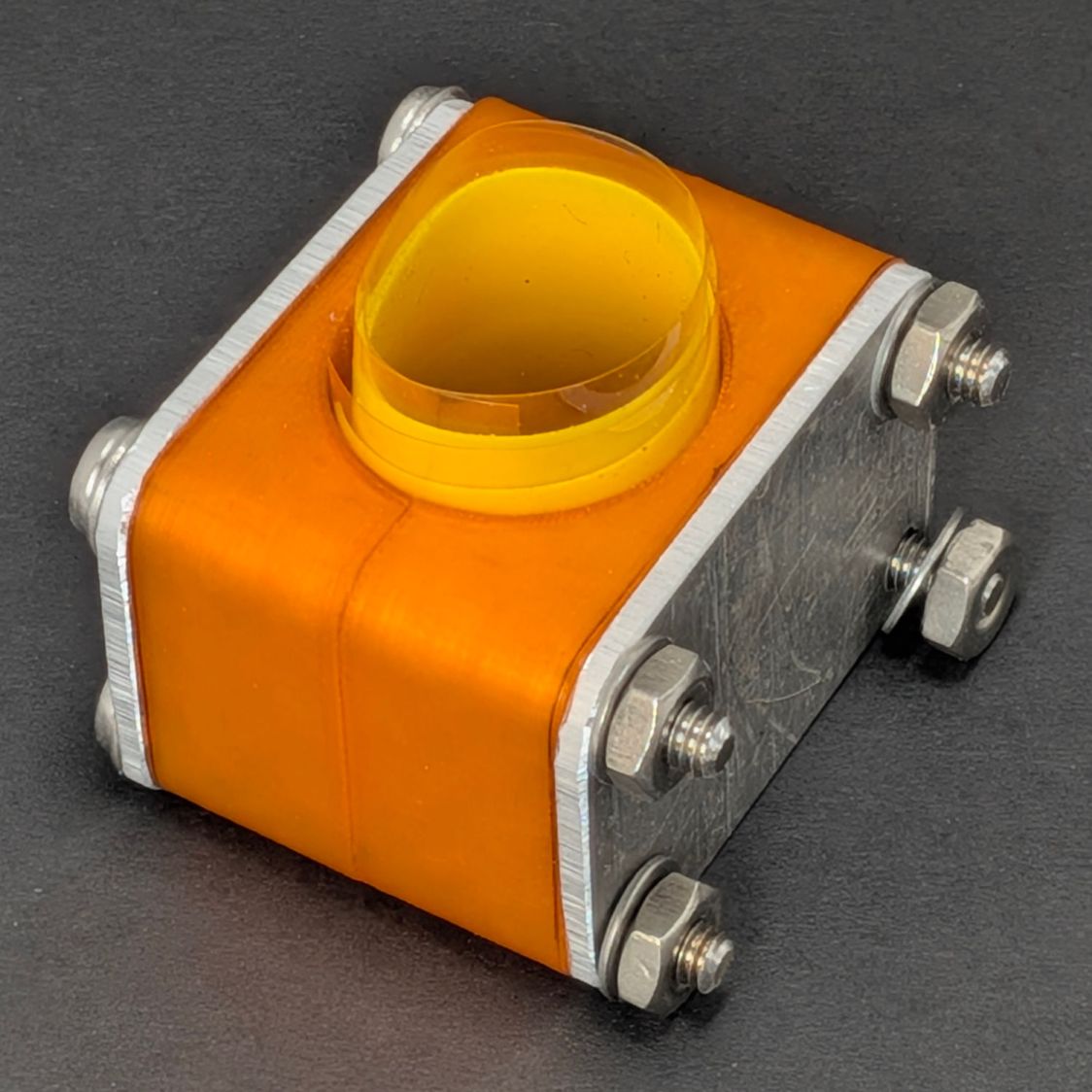
Mary wanted less pressure in the spray while watering her plants and I suggested replacing the nozzle’s washer with a flow restrictor:
Hose Nozzle Flow Restrictors – assembled
The 3D-printed TPU base is squishy enough to act as a hose washer:
Hose Nozzle Flow Restrictor Base – solid model
A 1.5 mm thick acrylic orifice plate snapped into the opening takes advantage of the laser cutter’s precision:
Hose Nozzle Flow Restrictors – LightBurn layout
For lack of anything smarter, the holes have areas that are powers-of-two smaller than the nozzle’s 14.2 mm = 158 mm² internal passage: the hole labeled 8 is 158/256 mm² = 0.62 mm² → 0.9 mm diameter.
Rather than figuring each hole’s diameter, just divide the previous diameter by √2 or rescale it by 100%/√2, which LightBurn can evaluate directly in its Numeric Edits fields. The as-cut holes are larger than their nominal size by about 0.1 mm, but any errors that might cause are definitely in the nature of fine tuning while watering the plants.
The nozzle’s Shower pattern (on the left in the picture) has a 6.8 L/minute = 110 ml/s flow through an ordinary garden hose washer. The four smallest aperture plates produced these flows:
Hose Nozzle Flow Restrictors – flow vs dia
The flow should scale with the square of the aperture diameter, which I could bully those points into suggesting, but the measurement accuracy produced by filling a gallon jug while tapping my phone’s stopwatch doesn’t justify anything fancier.
The two smallest apertures reduce the Shower pattern to a very gentle spray requiring far too long to put enough water on the plants. Mary now uses an old plastic sprinkler head with enough holes to produce a dense spray with very little force, with the flow set by fifty feet of PEX pipe running across the width of the house from the town water inlet to the hose bib.
It was a fun exercise and I learned a little more about printing TPU and fitting acrylic parts therein:
A large gooey puddle helped isolate a leak in the Dripworks main line pipe running the length of Mary’s Vassar Farms plot:
Dripworks Mainline clamp – injured hose joint
Much of the tubing between the transfer barb in the buried pipe and the cross coupling lies on the surface, where it’s subject to missteps. This being just a few feet inside the garden gate, it’s no surprise enough missteps caused the barb to no longer seal properly.
You’re supposed to wrap silicone tape while keeping its surface clean, which is obviously impossible in a hole rapidly filling with water draining from the plumbing but the clamp presses the tape firmly against the pipe and seals the leak.
There is, I regret to say, an 8-32 stainless steel washer lost somewhere deep in the muck.
I punched a new barb into the pipe with slightly longer tubing to the cross fitting, in the hope it’ll be more resilient.
Another clamp with its silicone tape snippet stands ready for duty:
Dripworks Mainline Pipe Clamp – assembled
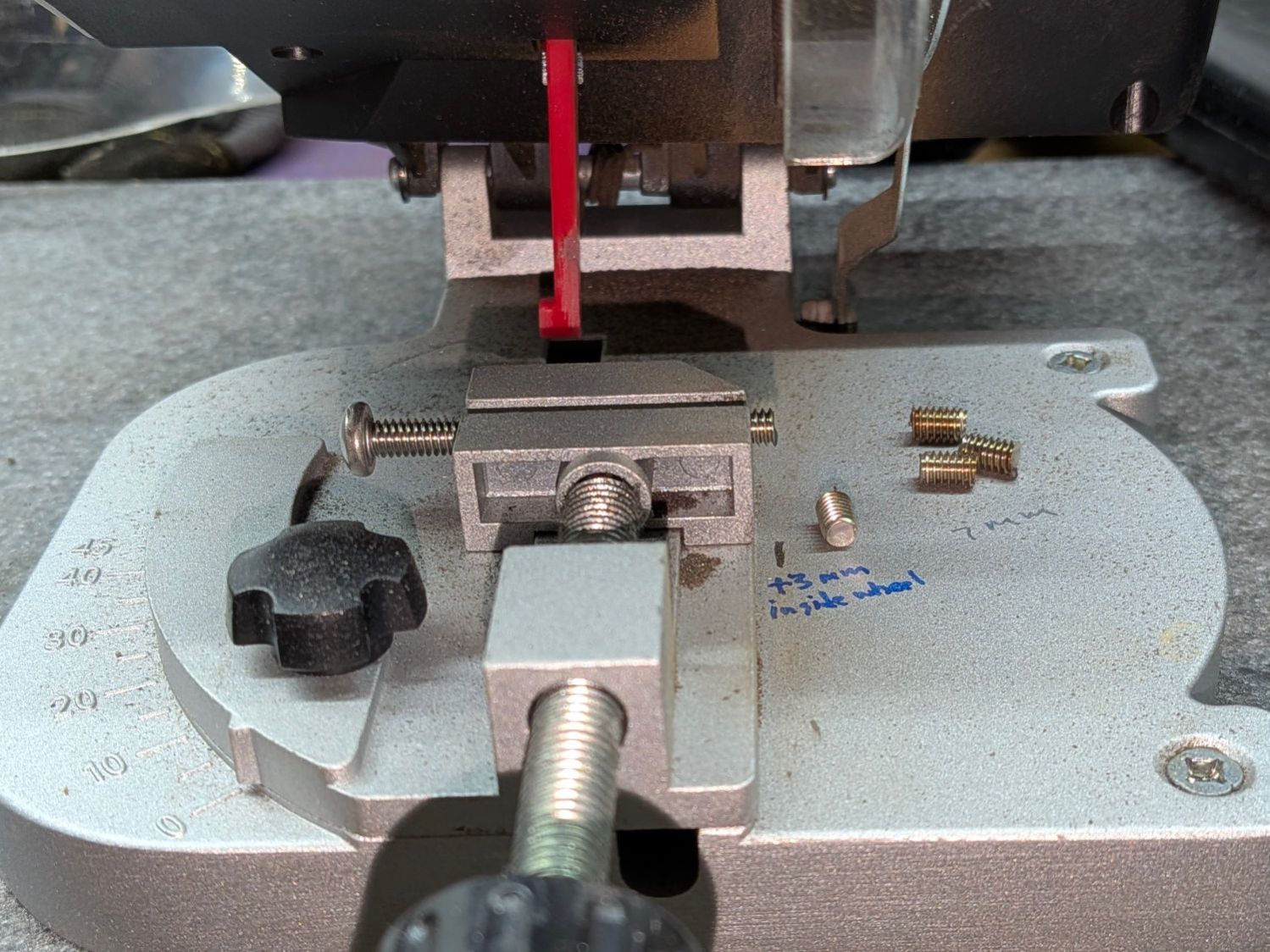
For the record, the Micromark Cutoff Saw has a 3 mm offset between the side of the vise and the left edge of the blade:
Micromark abrasive cutoff – work offset
I still lack a Round Tuit for improving that vise.
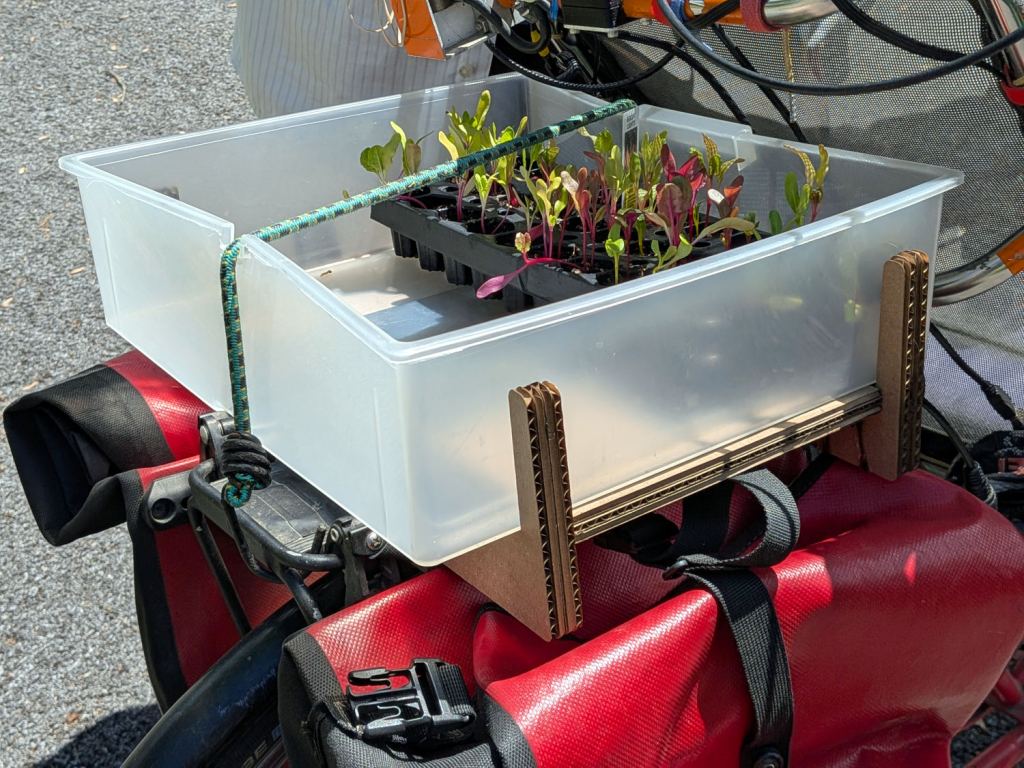
Mary starts her garden plants at home, then hauls the trays to the garden in a plastic drawer strapped to the rack on her Tour Easy to avoid crushing the plants in the packs. I finally learned enough to make an adapter mating the drawer to the rack:
Bike Rack Tray Holder – in use
It’s made from four layers of laser-cut cardboard glued together with crossed corrugations for stiffness. I intended make a final version from glued-up plywood sheets, but it works surprisingly well as-is and I may just make another when this one wears out.
The rear view:
Bike Rack Tray Holder – rear view
The front has a cutout for the battery powering the rear camera, with the base height allowing enough meat above the battery:
Bike Rack Tray Holder – overview
The upright posts cradling the drawer may be too skinny for durability, which is why this is a prototype. The inner edges of the posts angle outward by a few millimeters to match the drawer’s mold draft.
Four feet locate the holder on the rack rails just ahead of the Ortlieb pack clips:
Bike Rack Tray Holder – rail detail
The rails are 8 mm ⌀ and the cutouts are 9 mm, because a little tolerance goes a long way. Similarly the tab widths just fit the available spaces beside the rail.
The two flat plates support the drawer and space the uprights to match the Ortlieb clips. I intended to mortise the plates into the uprights, but hot melt glue is wonderful stuff and the joint may outlast the cardboard. In retrospect, the outer edges of the plates should align with the inner sides of the uprights for maximum tidiness.
You don’t have that drawer and likely not the racks, so a picture of the LightBurn layout will give you the general idea for your hardware:
Bike Rack Tray Holder – LightBurn layout
Cut four copies of the uprights in two different orientations, glue them together, then do the obvious thing with the plates.
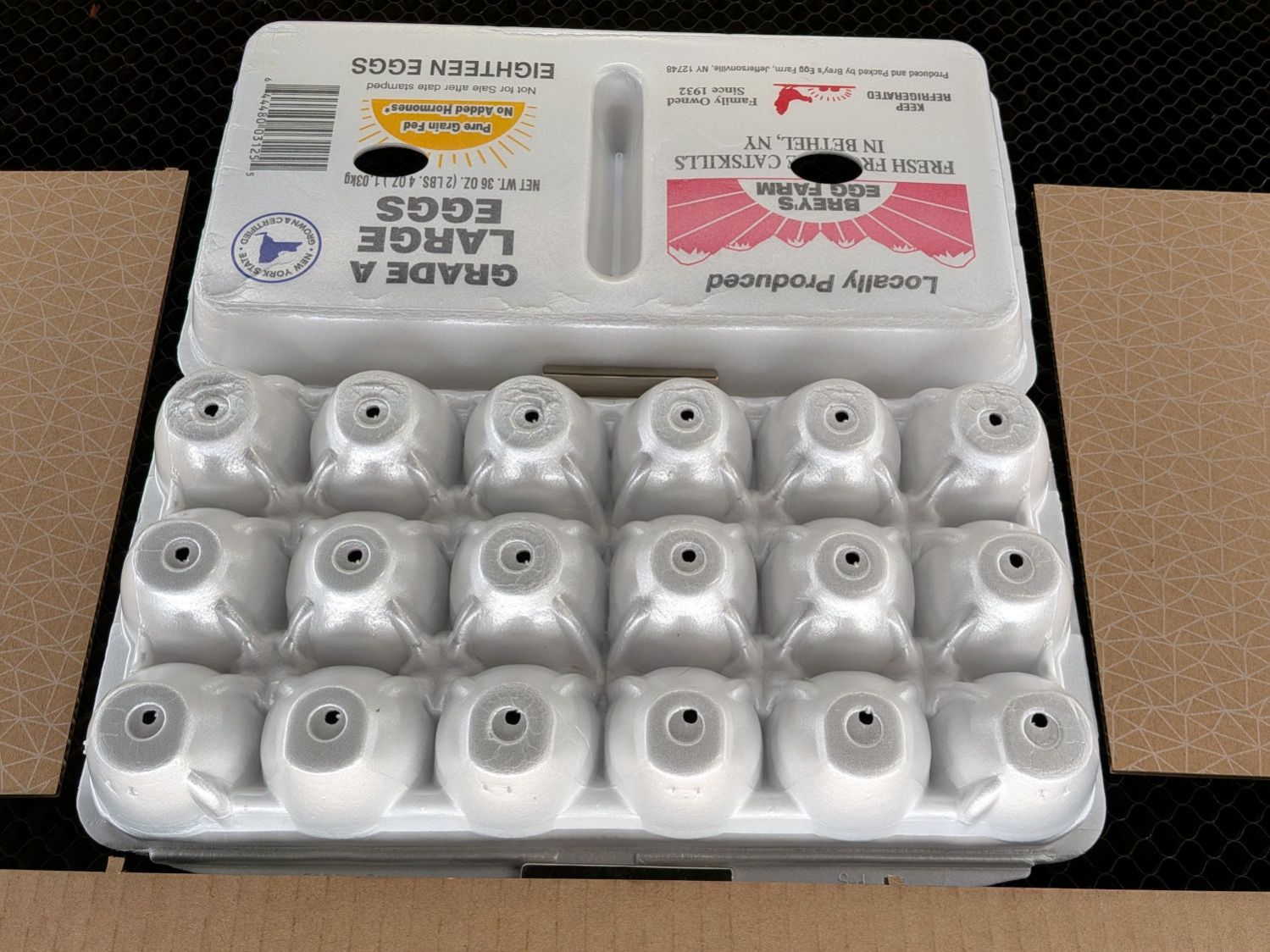
Mary has been using Styrofoam egg cartons to sprout seeds for this year’s garden veggies:
Egg carton sprouter – hand cut
I looked at those artisanal holes and offered to make sprouters with precisely calibrated laser-cut holes.
After the laughter died down, this happened:
Egg carton sprouter – lid detail
Each egg compartment has a drainage hole in the bottom:
Egg carton sprouter – on platform
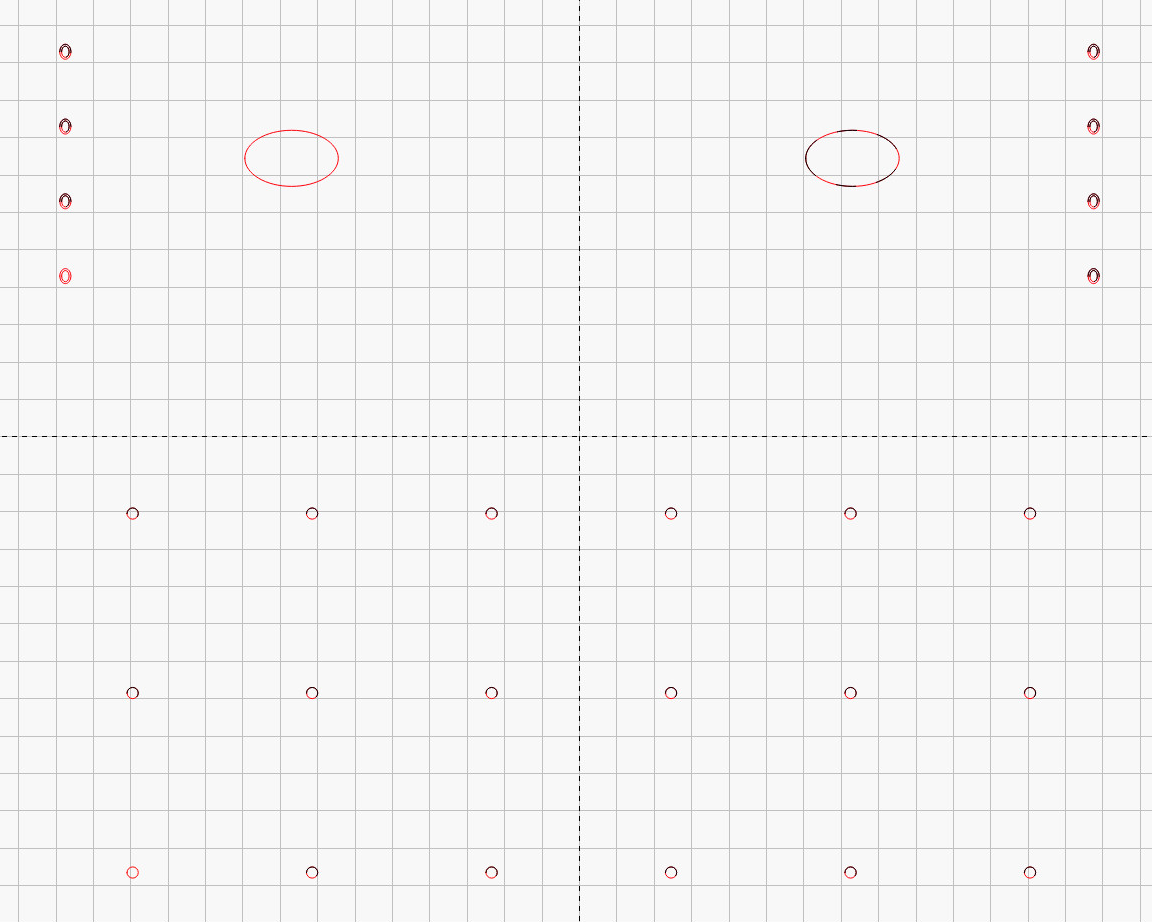
The LightBurn layout has four shapes in three virtual arrays:
Drain holes: 3 mm circle, 6×3 array
Top vents: 25×15 mm oval, 2×1 array
Side vents: concentric 3×4 & 2×3 mm ovals, 2×4 array
Which looks like this:
Egg Carton Sprouter – LightBurn layout
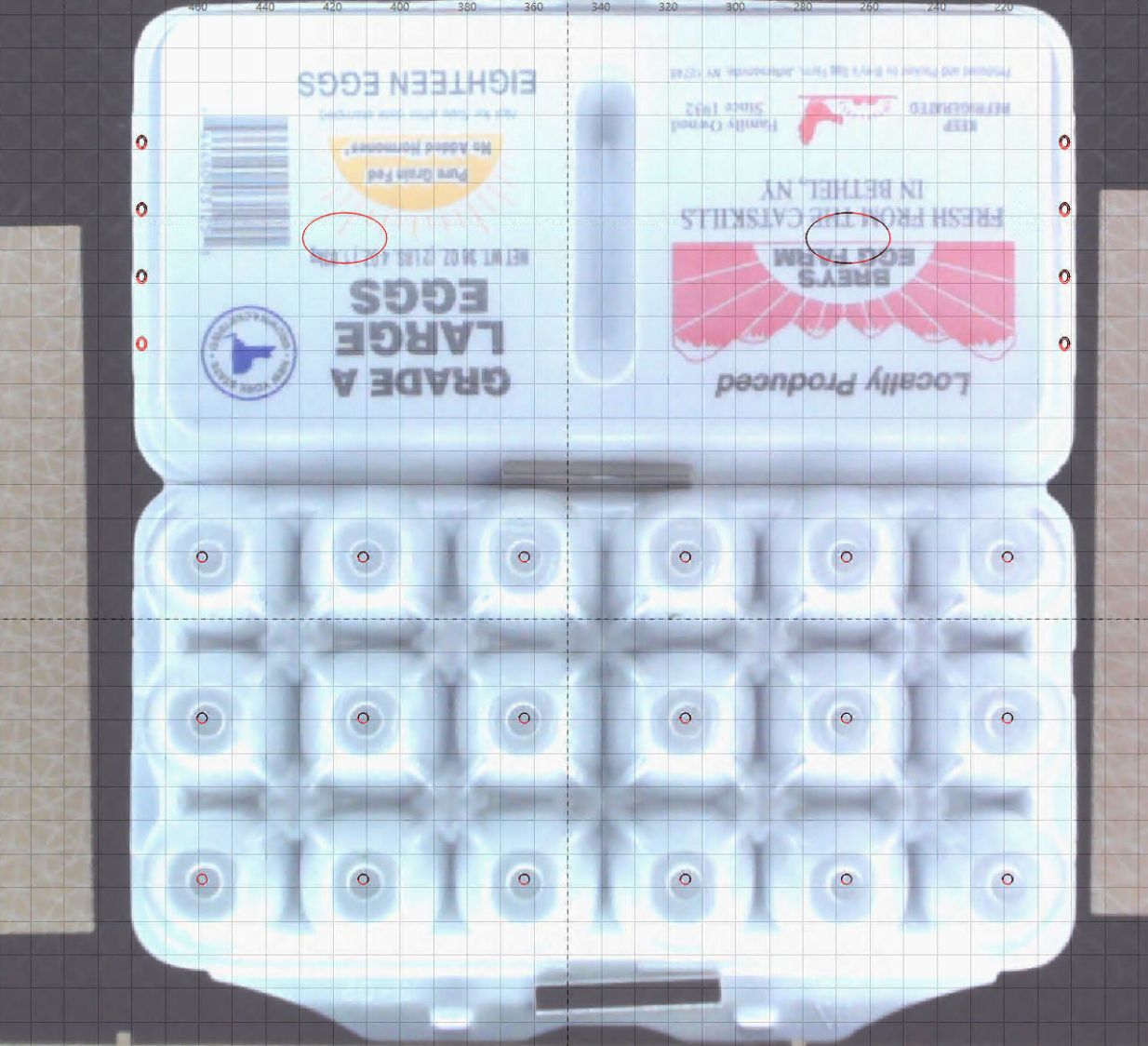
Because this isn’t a high-precision operation, I align the patterns to the carton using the camera:
Egg Carton Sprouter – LightBurn camera alignment
The two halves of the unfolded carton aren’t the same height, which means the top and bottom patterns have different focus levels and must be cut in two operations.
The SiLite tray is well-weathered, but remains structurally sound: still ready for service in the D-Hall breakfast line on the morning after the Apocalypse.
The cart in Mary’s Vassar Farm plot returned in need of repair:
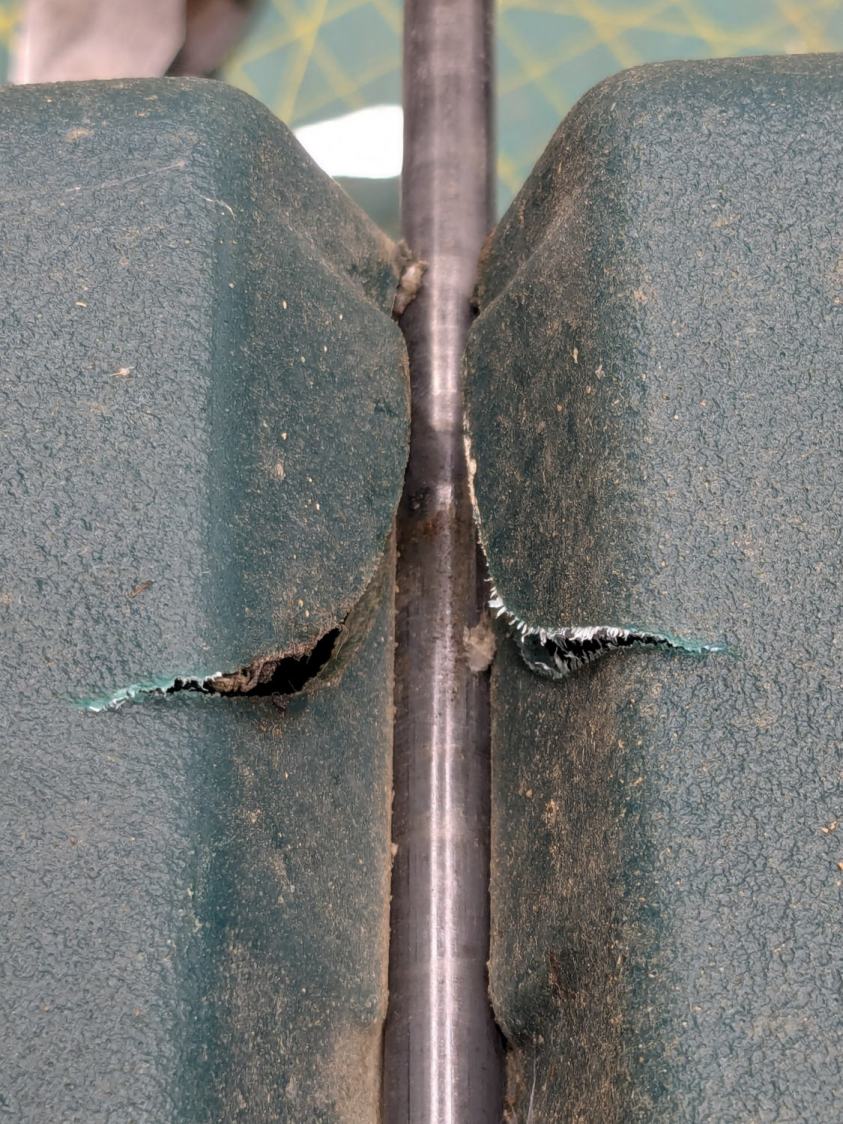
Garden Seat – fractured body
Those fractures near the end of the axle let the axle erode the side wall:
Garden Seat – eroded body
This will obviously require some sort of reinforcement on the body holding the axle, but the first challenge involved getting the wheels off the axle:
Garden Seat – axle cover
Some brute force revealed the hub covers snapped over an install-only locking fastener:
Garden Seat – axle retaining clip
More brute force cut those fasteners (a.k.a. star-lock washers) to get the wheels off the axles.
While contemplating the situation, a box of 606 bearings (as used in the PolyDryer auto-rewind spindles) failed to scamper out of the way and produced a victim fitting perfectly on the 8 mm axle:
Garden Seat – bearing idea
I regard such happenstance as a message from the Universe showing I’m on the right track. The alert reader will note the axle should not rotate, but does sport scars showing it’s done some turning in the recent past, so the bearing may not be a completely Bad Idea™.
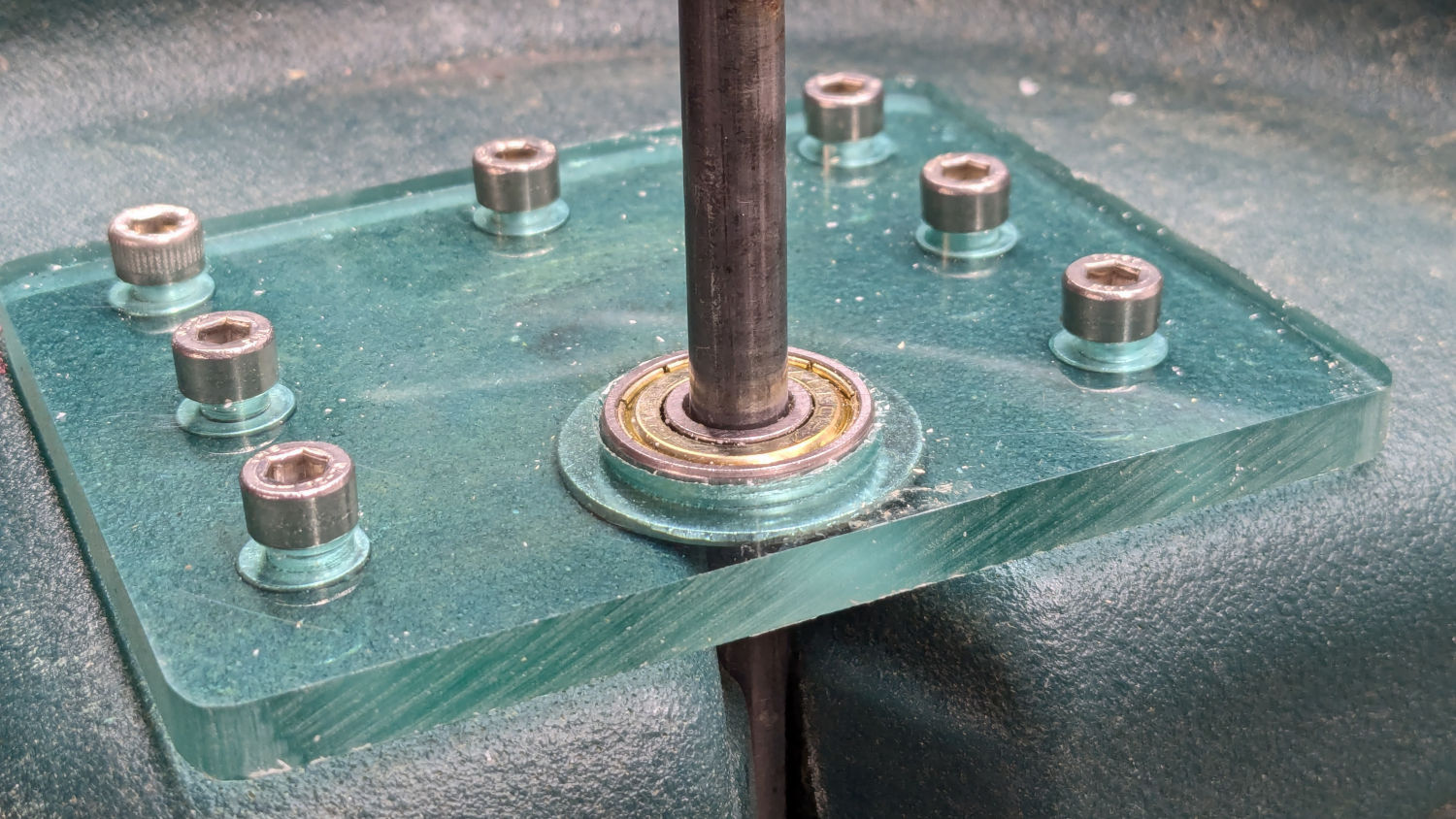
Finding a Lexan snippet exactly as thick as the bearing suggested bolting a plate across the side of the body to support the bearing, like this:
Garden Seat – reinforcing plate installed
Some layout work in LightBurn produced a template to mark the body for hand-drilling the holes:
Garden Seat – drill marking template
In retrospect, that was a mistake. I should have:
Laser-cut an MDF sheet to make a drill jig
Drilled one hole and inserted a screw
Drilled the rest of the holes in exactly the right places
Instead, three of the holes in that nice Lexan sheet ended up slightly egg-shaped to adjust for mis-drilled holes in the body.
I squeezed 5 mm rivnuts into whatever fiber-reinforced plastic they used for the body, which worked better than I expected. They’re intended for sheet metal, so I set the tool for 5 mm compression and they seem secure. I hope using plenty of screws across a large plate will diffuse the stress on each screw.
In this situation, I regard JB KwikWeld epoxy as “removable with some effort”, as opposed to the destruction required with those star-lock washers. High-strength Locktite might also be suitable, but I do not anticipate ever having to remove these again for any reason and do not want the nuts to fall off in the garden.