|
// Holder for Li-Ion battery packs |
|
// Ed Nisley KE4ZNU January 2013 |
|
// 2018-11-15 Adapted for 1.5 mm pogo pins, battery data table |
|
// 2018-12 RGB LED spider, general cleanups |
|
|
|
/* [Layout options] */ |
|
|
|
BatteryName = "NP-BX1"; // [NP-BX1,NB-5L,NB-6L] |
|
|
|
RGBCircuit = true; // false = 1 strut pair, true = 2 pairs |
|
|
|
Layout = "Case"; // [Build,Show,Fit,Case,Lid,Pins,RGBSpider] |
|
|
|
/* [Extrusion parameters] – must match reality! */ |
|
// Print with +2 shells and 3 solid layers |
|
|
|
ThreadThick = 0.25; |
|
ThreadWidth = 0.40; |
|
|
|
HoleWindage = 0.2; |
|
|
|
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit); |
|
function IntegerLessMultiple(Size,Unit) = Unit * floor(Size / Unit); |
|
|
|
Protrusion = 0.1; // make holes end cleanly |
|
|
|
/* [Hidden] */ |
|
|
|
inch = 25.4; |
|
|
|
BuildOffset = 3.0; // clearance for build layout |
|
|
|
Gap = 2.0; // separation for Fit parts |
|
|
|
//- Basic dimensions |
|
|
|
WallThick = 4*ThreadWidth; // holder sidewalls |
|
|
|
BaseThick = 6*ThreadThick; // bottom of holder to bottom of battery |
|
TopThick = 6*ThreadThick; // top of battery to top of holder |
|
|
|
//- Battery dimensions – rationalized from several samples |
|
// Coordinate origin at battery corner with contacts, key openings downward |
|
|
|
T_NAME = 0; // Name must fit recess, so don't get loquacious |
|
T_SIZE = 1; |
|
T_CONTACTS = 2; |
|
T_KEYS = 3; |
|
|
|
BatteryData = [ |
|
["NP-BX1",[43.0,30.0,9.5],[[-0.75,6.0,6.2],[-0.75,16.0,6.2]],[[1.70,3.70,2.90],[1.70,3.60,2.90]]], |
|
["NB-5L", [45.0,32.0,8.0],[[-0.82,4.5,3.5],[-0.82,11.0,3.5]],[[2.2,0.75,2.0],[2.2,2.8,2.0]]], |
|
["NB-6L",[42.5,35.5,7.0],[[-0.85,5.50,3.05],[-0.85,11.90,3.05]],[[2.0,0.70,2.8],[2.0,2.00,2.8]]], |
|
]; |
|
|
|
echo(str("Battery: ",BatteryName)); |
|
|
|
BatteryIndex = search([BatteryName],BatteryData,1,0)[0]; |
|
echo(str(" Index: ",BatteryIndex)); |
|
|
|
BatterySize = BatteryData[BatteryIndex][T_SIZE]; // X = length, Y = width, Z = thickness |
|
echo(str(" Size: ",BatterySize)); |
|
|
|
Contacts = BatteryData[BatteryIndex][T_CONTACTS]; // relative to battery edge, front, and bottom |
|
echo(str(" Contacts: ",Contacts)); |
|
|
|
ContactOC = Contacts[1].y – Contacts[0].y; // + and – terminals for pogo pin contacts |
|
ContactCenter = Contacts[0].y + ContactOC/2; |
|
|
|
KeyBlocks = BatteryData[BatteryIndex][T_KEYS]; // recesses in battery face set X position |
|
echo(str(" Keys: ",KeyBlocks)); |
|
|
|
//- Pin dimensions |
|
|
|
ID = 0; |
|
OD = 1; |
|
LENGTH = 2; |
|
|
|
PinShank = [1.5,2.0,6.5]; // shank, flange, compressed length |
|
PinFlange = [1.5,2.0,0.5]; // flange, length included in PinShank |
|
PinTip = [0.9,0.9,2.5]; // extended spring-loaded tip |
|
|
|
WireOD = 1.7; // wiring from pins to circuitry |
|
|
|
PinChannel = WireOD; // cut behind flange for solder overflow |
|
PinRecess = 3.0; // recess behind pin flange end for epoxy fill |
|
|
|
echo(str("Contact tip dia: ",PinTip[OD])); |
|
echo(str(" .. shank dia: ",PinShank[ID])); |
|
|
|
OverTravel = 0.5; // space beyond battery face at X origin |
|
|
|
//- Holder dimensions |
|
|
|
GuideRadius = ThreadWidth; // friction fit ridges |
|
GuideOffset = 7; // from compartment corners |
|
|
|
LidOverhang = 2.0; // atop of battery for retention |
|
LidClearance = LidOverhang * (BatterySize.z/BatterySize.x); // … clearance above battery for tilting |
|
echo(str("Lid clearance: ",LidClearance)); |
|
|
|
CaseSize = [BatterySize.x + PinShank[LENGTH] + OverTravel + PinRecess + GuideRadius + WallThick, |
|
BatterySize.y + 2*WallThick + 2*GuideRadius, |
|
BatterySize.z + BaseThick + TopThick + LidClearance]; |
|
echo(str("Case size: ",CaseSize)); |
|
|
|
CaseOffset = [-(PinShank[LENGTH] + OverTravel + PinRecess),-(WallThick + GuideRadius),0]; // position around battery |
|
|
|
ThumbRadius = 10.0; // thumb opening at end of battery |
|
|
|
CornerRadius = 3*ThreadThick; // nice corner rounding |
|
|
|
LidSize = [-CaseOffset.x + LidOverhang,CaseSize.y,TopThick]; |
|
|
|
LidOffset = [0.0,CaseOffset.y,0]; |
|
|
|
//- Wire struts |
|
|
|
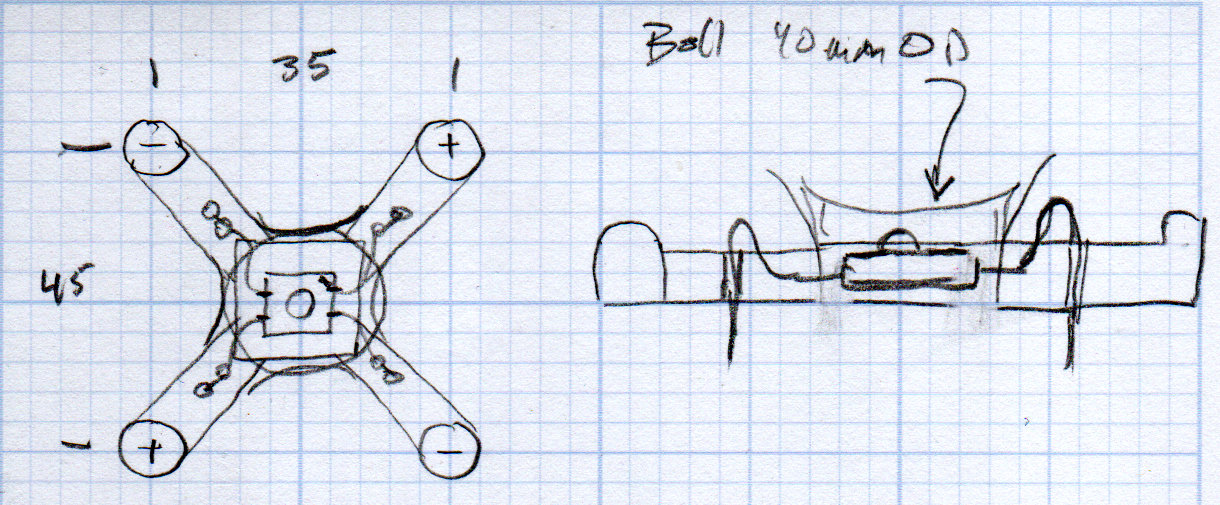
StrutDia = 1.6; // AWG 14 = 1.6 mm |
|
StrutSides = 3*4; |
|
|
|
StrutBase = [StrutDia,StrutDia + 4*WallThick,CaseSize.z – TopThick]; // ID = wire, OD = buildable |
|
|
|
//StrutOC = [IntegerLessMultiple(BatterySize.x – StrutBase[OD],5.0), // set easy OC wire spacing |
|
// IntegerMultiple(CaseSize.y + StrutBase[OD],5.0)]; |
|
StrutOC = [IntegerLessMultiple(CaseSize.x – 2*CornerRadius -2*StrutBase[OD],5.0), |
|
IntegerMultiple(CaseSize.y + StrutBase[OD],5.0)]; |
|
|
|
StrutOffset = [CaseSize.x/2 + CaseOffset.x,BatterySize.y/2]; // from case centerlines |
|
|
|
StrutAngle = atan(StrutOC.y/StrutOC.x); |
|
|
|
echo(str("Strut OC: ",StrutOC)); |
|
|
|
//- RGB LED |
|
|
|
RGBBody = [8.0,8.0,5.0]; // Z = body height |
|
|
|
RGBPin = 5.0; // pin length |
|
RGBPinsOC = [5.0,5.0]; // pin layout |
|
|
|
RGBRecess = RGBBody.z + RGBPin/2; // maximum LED recess depth |
|
|
|
BallOD = 40.0; // radome sphere |
|
BallSides = 4*StrutSides; // nice number of sides |
|
|
|
BallPillar = [norm([RGBBody.x,RGBBody.y]), |
|
norm([RGBBody.x,RGBBody.y]) + 4*WallThick, |
|
StrutBase[OD] + RGBBody.z]; |
|
BallChordM = BallOD/2 – sqrt(pow(BallOD/2,2) – (pow(BallPillar[OD],2))/4); |
|
echo(str("Ball chord depth: ",BallChordM)); |
|
|
|
//———————- |
|
// Useful routines |
|
|
|
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes |
|
|
|
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2); |
|
|
|
FixDia = Dia / cos(180/Sides); |
|
|
|
cylinder(r=(FixDia + HoleWindage)/2,h=Height,$fn=Sides); |
|
} |
|
|
|
//——————- |
|
//– Guides for tighter friction fit |
|
|
|
module Guides() { |
|
translate([GuideOffset,-GuideRadius,0]) |
|
PolyCyl(2*GuideRadius,(BatterySize.z – Protrusion),4); |
|
translate([GuideOffset,(BatterySize.y + GuideRadius),0]) |
|
PolyCyl(2*GuideRadius,(BatterySize.z – Protrusion),4); |
|
translate([(BatterySize.x – GuideOffset),-GuideRadius,0]) |
|
PolyCyl(2*GuideRadius,(BatterySize.z – Protrusion),4); |
|
translate([(BatterySize.x – GuideOffset),(BatterySize.y + GuideRadius),0]) |
|
PolyCyl(2*GuideRadius,(BatterySize.z – Protrusion),4); |
|
translate([(BatterySize.x + GuideRadius),GuideOffset/2,0]) |
|
PolyCyl(2*GuideRadius,(BatterySize.z – Protrusion),4); |
|
translate([(BatterySize.x + GuideRadius),(BatterySize.y – GuideOffset/2),0]) |
|
PolyCyl(2*GuideRadius,(BatterySize.z – Protrusion),4); |
|
|
|
} |
|
|
|
//– Contact pins |
|
// Rotated to put them in their natural oriention |
|
// Aligned to put tip base / end of shank at Overtravel limit |
|
|
|
module PinShape() { |
|
|
|
translate([-(PinShank[LENGTH] + OverTravel),0,0]) |
|
rotate([0,90,0]) |
|
rotate(180/6) |
|
union() { |
|
PolyCyl(PinTip[OD],PinShank[LENGTH] + PinTip[LENGTH],6); |
|
PolyCyl(PinShank[ID],PinShank[LENGTH] + Protrusion,6); // slight extension for clean cuts |
|
PolyCyl(PinFlange[OD],PinFlange[LENGTH],6); |
|
} |
|
} |
|
|
|
// Position pins to put end of shank at battery face |
|
// Does not include recess access into case |
|
|
|
module PinAssembly() { |
|
|
|
union() { |
|
for (p = Contacts) |
|
translate([0,p.y,p.z]) |
|
PinShape(); |
|
|
|
translate([-(PinShank[LENGTH] + OverTravel) + PinChannel/2, // solder space |
|
ContactCenter, |
|
Contacts[0].z]) |
|
cube([PinChannel, |
|
(Contacts[1].y – Contacts[0].y + PinFlange[OD]), |
|
PinFlange[OD]],center=true); |
|
|
|
for (j=[-1,1]) // wire channels |
|
translate([-(PinShank[LENGTH] + OverTravel – PinChannel/2), |
|
j*ContactOC/4 + ContactCenter, |
|
Contacts[0].z – PinFlange[OD]/2]) |
|
rotate(180/6) |
|
PolyCyl(WireOD,CaseSize.z,6); |
|
} |
|
} |
|
|
|
//– Case with origin at battery corner |
|
|
|
module Case() { |
|
|
|
difference() { |
|
|
|
union() { |
|
|
|
difference() { |
|
union() { |
|
translate([(CaseSize.x/2 + CaseOffset.x), // basic case shape |
|
(CaseSize.y/2 + CaseOffset.y), |
|
(CaseSize.z/2 – BaseThick)]) |
|
hull() |
|
for (i=[-1,1], j=[-1,1], k=[-1,1]) |
|
translate([i*(CaseSize.x/2 – CornerRadius), |
|
j*(CaseSize.y/2 – CornerRadius), |
|
k*(CaseSize.z/2 – CornerRadius)]) |
|
sphere(r=CornerRadius/cos(180/8),$fn=8); // cos() fixes undersize spheres! |
|
|
|
for (i= RGBCircuit ? [-1,1] : -1) { // strut bases |
|
hull() |
|
for (j=[-1,1]) |
|
translate([i*StrutOC.x/2 + StrutOffset.x,j*StrutOC.y/2 + StrutOffset.y,-BaseThick]) |
|
rotate(180/StrutSides) |
|
cylinder(d=StrutBase[OD],h=StrutBase[LENGTH],$fn=StrutSides); |
|
|
|
translate([i*StrutOC.x/2 + StrutOffset.x,StrutOffset.y,StrutBase[LENGTH]/2 – BaseThick]) |
|
cube([2*StrutBase[OD],StrutOC.y,StrutBase[LENGTH]],center=true); // blocks for fairing |
|
|
|
for (j=[-1,1]) // hemisphere caps |
|
translate([i*StrutOC.x/2 + StrutOffset.x, |
|
j*StrutOC.y/2 + StrutOffset.y, |
|
StrutBase[LENGTH] – BaseThick]) |
|
rotate(180/StrutSides) |
|
sphere(d=StrutBase[OD]/cos(180/StrutSides),$fn=StrutSides); |
|
|
|
} |
|
} |
|
|
|
translate([-OverTravel,-GuideRadius,0]) |
|
cube([(BatterySize.x + GuideRadius + OverTravel), |
|
(BatterySize.y + 2*GuideRadius), |
|
(BatterySize.z + LidClearance + Protrusion)]); // battery space |
|
|
|
translate([BatterySize.x/2,BatterySize.y/2,0]) // recess around battery name |
|
cube([0.8*BatterySize.x,8,2*ThreadThick],center=true); |
|
} |
|
|
|
Guides(); // improve friction fit |
|
|
|
translate([-OverTravel,-GuideRadius,0]) // battery keying blocks |
|
cube(KeyBlocks[0] + [OverTravel,GuideRadius,0],center=false); |
|
translate([-OverTravel,(BatterySize.y – KeyBlocks[1].y),0]) |
|
cube(KeyBlocks[1] + [OverTravel,GuideRadius,0],center=false); |
|
|
|
translate([BatterySize.x/2,BatterySize.y/2,-ThreadThick]) // battery name! |
|
linear_extrude(height=2*ThreadThick,convexity=10) |
|
text(text=BatteryName,size=5,spacing=1.20,font="Arial:style:Bold",halign="center",valign="center"); |
|
|
|
|
|
} |
|
|
|
translate([2*CaseOffset.x, // battery top access |
|
(CaseOffset.y – Protrusion), |
|
BatterySize.z + LidClearance]) |
|
cube([2*CaseSize.x,(CaseSize.y + 2*Protrusion),2*TopThick]); |
|
|
|
for (i2 = RGBCircuit ? [-1,1] : -1) { // strut wire holes and fairing |
|
for (j=[-1,1]) |
|
translate([i2*StrutOC.x/2 + StrutOffset.x,j*StrutOC.y/2 + StrutOffset.y,0]) |
|
rotate(180/StrutSides) |
|
PolyCyl(StrutBase[ID],2*StrutBase[LENGTH],StrutSides); |
|
|
|
for (i=[-1,1], j=[-1,1]) |
|
translate([i*StrutBase[OD] + (i2*StrutOC.x/2 + StrutOffset.x), |
|
j*StrutOC.y/2 + StrutOffset.y, |
|
-(BaseThick + Protrusion)]) |
|
rotate(180/StrutSides) |
|
PolyCyl(StrutBase[OD],StrutBase[LENGTH] + 2*Protrusion,StrutSides); |
|
} |
|
|
|
translate([(BatterySize.x – Protrusion), // remove thumb notch |
|
(CaseSize.y/2 + CaseOffset.y), |
|
(ThumbRadius)]) |
|
rotate([90,0,0]) |
|
rotate([0,90,0]) |
|
cylinder(r=ThumbRadius, |
|
h=(WallThick + GuideRadius + 2*Protrusion), |
|
$fn=22); |
|
|
|
PinAssembly(); // pins and wiring |
|
|
|
translate([CaseOffset.x + PinRecess + Protrusion,(Contacts[1].y + Contacts[0].y)/2,Contacts[0].z]) |
|
translate([-PinRecess,0,0]) |
|
cube([2*PinRecess, |
|
(Contacts[1].y – Contacts[0].y + PinFlange[OD]/cos(180/6) + 2*HoleWindage), |
|
2*PinFlange[OD]],center=true); // pin insertion hole |
|
|
|
translate([CaseOffset.x/2 + BatterySize.x/2,BatterySize.y/2,-(BaseThick + Protrusion)]) |
|
linear_extrude(height=2*ThreadThick + Protrusion,convexity=10) |
|
mirror([0,1,0]) |
|
text(text="KE4ZNU",size=6,spacing=1.20,font="Arial:style:Bold",halign="center",valign="center"); |
|
} |
|
|
|
} |
|
|
|
// Lid position offset to match case |
|
|
|
module Lid() { |
|
|
|
difference() { |
|
translate([-LidSize.x/2 + LidOffset.x + LidOverhang,LidSize.y/2 + LidOffset.y,0]) |
|
difference() { |
|
hull() |
|
for (i=[-1,1], j=[-1,1], k=[-1,1]) |
|
translate([i*(LidSize.x/2 – CornerRadius), |
|
j*(LidSize.y/2 – CornerRadius), |
|
k*(LidSize.z – CornerRadius)]) // double thickness for flat bottom |
|
sphere(r=CornerRadius,$fn=8); |
|
|
|
translate([0,0,-LidSize.z/2]) // remove bottom |
|
cube([(LidSize.x + 2*Protrusion),(LidSize.y + 2*Protrusion),LidSize.z],center=true); |
|
|
|
translate([LidSize.x/8,0,0]) |
|
cube([LidSize.x/4,0.75*LidSize.y,4*ThreadThick],center=true); // epoxy recess |
|
} |
|
|
|
translate([0,0,-(Contacts[0].z + PinFlange[OD])]) // punch wire holes |
|
PinAssembly(); |
|
} |
|
|
|
} |
|
|
|
// Spider for RGB LED + radome atop vertical struts |
|
|
|
module RGBSpider() { |
|
|
|
difference() { |
|
union() { |
|
for (i=[-1,1], j=[-1,1]) { |
|
translate([i*StrutOC.x/2,j*StrutOC.y/2,StrutBase[OD]/2]) |
|
rotate(180/StrutSides) // doesn't quite match crosspieces; close enough |
|
sphere(d=StrutBase[OD]/cos(180/StrutSides),$fn=StrutSides); |
|
translate([i*StrutOC.x/2,j*StrutOC.y/2,0]) |
|
rotate(180/StrutSides) |
|
cylinder(d=StrutBase[OD],h=StrutBase[OD]/2,$fn=StrutSides); |
|
} |
|
|
|
for (m=[-1,1]) // connecting bars |
|
rotate(m*StrutAngle) |
|
translate([0,0,StrutBase[OD]/4]) |
|
cube([norm(StrutOC),StrutBase[OD],StrutBase[OD]/2],center=true); |
|
|
|
translate([0,0,0]) // pillar for RGB LED and ball |
|
cylinder(d=BallPillar[OD],h=BallPillar[LENGTH],$fn=BallSides); |
|
} |
|
|
|
for (i=[-1,1], j=[-1,1]) // strut wires |
|
translate([i*StrutOC.x/2,j*StrutOC.y/2,-Protrusion]) |
|
rotate(0) |
|
PolyCyl(StrutBase[ID],StrutBase[OD]/2,6); |
|
|
|
for (m=[-1,1], n=[0,1]) // RGBA wires through bars |
|
rotate(m*StrutAngle + n*180) |
|
translate([StrutOC.x/3,0,-Protrusion]) |
|
PolyCyl(StrutBase[ID],StrutBase[OD],6); |
|
|
|
# translate([0,0,BallOD/2 + BallPillar[LENGTH] – BallChordM]) // ball inset |
|
sphere(d=BallOD); |
|
|
|
translate([0,0,2*RGBBody.z + (BallPillar[LENGTH] – BallChordM) – RGBRecess]) // LED inset |
|
cube(RGBBody + [HoleWindage,HoleWindage,3*RGBBody.z],center=true); // XY clearance + huge height for E-Z cut |
|
|
|
for (m=[-1,1]) // RGBA wires through pillar |
|
rotate(m*StrutAngle) |
|
translate([0,0,StrutBase[OD]/2 + WireOD/2 + 0*Protrusion]) |
|
cube([norm(StrutOC)/2,WireOD,WireOD],center=true); |
|
|
|
} |
|
} |
|
|
|
//——————- |
|
// Build it! |
|
|
|
if (Layout == "Case") |
|
Case(); |
|
|
|
if (Layout == "Lid") |
|
Lid(); |
|
|
|
if (Layout == "RGBSpider") { |
|
RGBSpider(); |
|
} |
|
|
|
if (Layout == "Pins") { |
|
color("Silver",0.5) |
|
PinShape(); |
|
PinAssembly(); |
|
} |
|
|
|
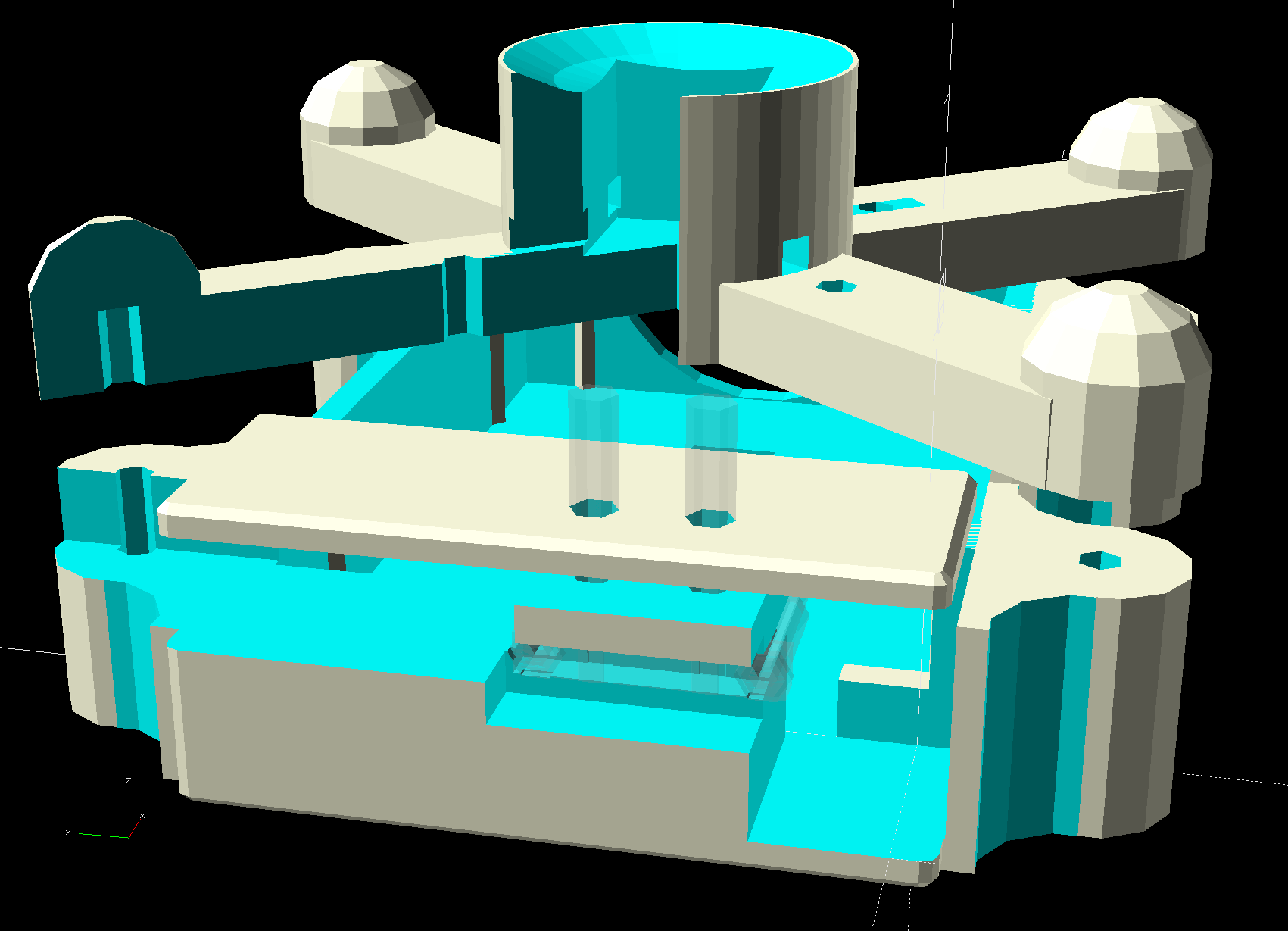
if (Layout == "Show") { // reveal pin assembly |
|
difference() { |
|
Case(); |
|
|
|
translate([(CaseOffset.x – Protrusion), |
|
Contacts[1].y, |
|
Contacts[1].z]) |
|
cube([(-CaseOffset.x + Protrusion),CaseSize.y,CaseSize.z]); |
|
|
|
translate([(CaseOffset.x – Protrusion), |
|
(CaseOffset.y – Protrusion), |
|
0]) |
|
cube([(-CaseOffset.x + Protrusion), |
|
Contacts[0].y + Protrusion – CaseOffset.y, |
|
CaseSize.z]); |
|
} |
|
|
|
translate([0,0,BatterySize.z + Gap]) |
|
Lid(); |
|
|
|
color("Silver",0.15) |
|
PinAssembly(); |
|
|
|
if (RGBCircuit) |
|
translate([StrutOC.x/2,BatterySize.y/2,2*BatterySize.z]) |
|
difference() { |
|
RGBSpider(); |
|
rotate(180-StrutAngle) |
|
translate([0,0,-Protrusion]) |
|
cube([norm(StrutOC),StrutBase[OD],2*BallPillar.z],center=false); |
|
} |
|
|
|
} |
|
|
|
if (Layout == "Build") { |
|
translate([-BatterySize.x/2,-BatterySize.y/2,BaseThick]) |
|
Case(); |
|
translate([-CaseSize.x + LidSize.x,-(LidSize.y/2 + LidOffset.y),0]) |
|
Lid(); |
|
if (RGBCircuit) |
|
translate([StrutOC.x + BatterySize.x/2,0,0]) |
|
RGBSpider(); |
|
} |
|
|
|
if (Layout == "Fit") { |
|
Case(); |
|
translate([0,0,(BatterySize.z + Gap)]) |
|
Lid(); |
|
color("Silver",0.25) |
|
PinAssembly(); |
|
if (RGBCircuit) |
|
translate([StrutOC.x/2,BatterySize.y/2,2*BatterySize.z]) |
|
RGBSpider(); |
|
} |
|
|
|
|