Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Category: Science
If you measure something often enough, it becomes science
Using basically the same Arduino firmware as before, so the pedal scales the motor current without feedback:
Curr Sense RPM Spindle Pos
The top trace is the motor current, sampled through the ferrite toroid / Hall effect sensor / differential amp, at about 525 mA/V, so the current limit along those flat tops is 630 mA. There’s a small initial spike leading into each flat top, where (I think) the rapidly rising collector voltage rams enough current through the Miller capacitance into the base to briefly push the collector current upward.
The next trace is the motor RPM sensor, ticking along at 14 revolutions in 160 ms = 87.5 rev/s = 5250 RPM. The glitch toward the right side comes from me hitting the scope’s STOP button to freeze the display in mid-trace. There’s no trace of the setscrew glitch, although that may be due to the compressed scale rather than the absence of the glitch.
The bottom trace is the shaft position sensor, with 1 rev in 125 ms = 8 rev/s = 480 RPM. It’s nicely divided into equal halves, which is what you’d expect from looking at the counterweight.
Under these conditions the speed ratio works out to 10.93, a whopping 9% over my original guesstimate.
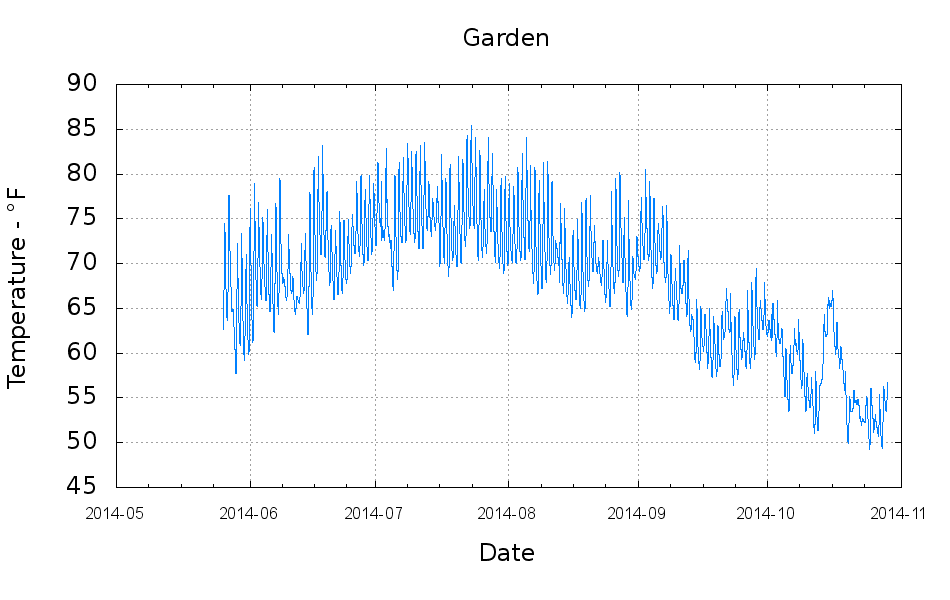
The soil temperature near the base of the bird box, under a few inches of chipped leaf mulch, shows the expected trend for the growing season, but there’s a weird bump in mid-October:
Garden Soil Temperature
The NWS temperature summary confirms the anomaly, with the DEP column giving the departure from the historic average:
So the good folks in the wordpress.com support infrastructure have been manually exporting my blog and sending me a link to the ZIP file, pursuant to the still unresolved failure-while-exporting issue. A bit of back-and-forth around the latest backup / export produced an interesting data point:
The message about the export file not being found is simply an indicator that the huge export could not finish compiling before a more general time limit was reached — in this case because your site is easily in the top .1% for size. I will pass your suggestion for improved exporting along.
I’m sure that’s among the freebie blogs on wordpress.com, but I never thought of myself as a member of the 0.1% club.
Huh. Snuck up on me while I wasn’t paying attention. If I could do that with money, I’d be on to something.
I’ve never participated in their post-a-day challenges, because that’s what I do around here. Should you find something interesting, every now and again, that’s a bonus.
Mary finished out the National Bike Challenge with a rank of 3353 of 47 k riders, which, by my reckoning, is wonderfully good. She’s #1 in the Poughkeepsie area (admittedly, of only eight riders), with the second-place rider at 90% of her point score.
She did it by riding on her usual missions, along our usual routes, around the usual obstacles:
NYS Rt 376 at Westview Terrace
Her bike odometer recently rolled past 20 k miles; at least one battery change stole a pile o’ miles from her total, so the bike has accumulated more than that.
As the song goes, my gal is red hot… in the best way!
Dell built the GX270 I’m repurposing back in 2004, early on in the capacitor plague years, but only one of the system board caps showed signs of leakage:
Capacitor plague – 2004 Dell Edition
While I was harvesting some of the connectors, it occurred to me that those powdered iron inductors might make good current sensors, as they’re already wound with heavy gauge copper wires.
I picked an inductor with enough turns and, although slitting didn’t pose much of a problem, the saw did make a mess of the turns adjacent to the cut:
Powdered iron toroid – slitting
Iron powder has more magnetic remnance than ferrite, to the extent that iron swarf clogged the gap. After the first pass, I ran the slit toroid through the degausser to shake it clean and see what damage had been done. It looked OK, so I realigned it on the saw blade and continued the mission, with all the dust vanishing into the vacuum cleaner’s snout.
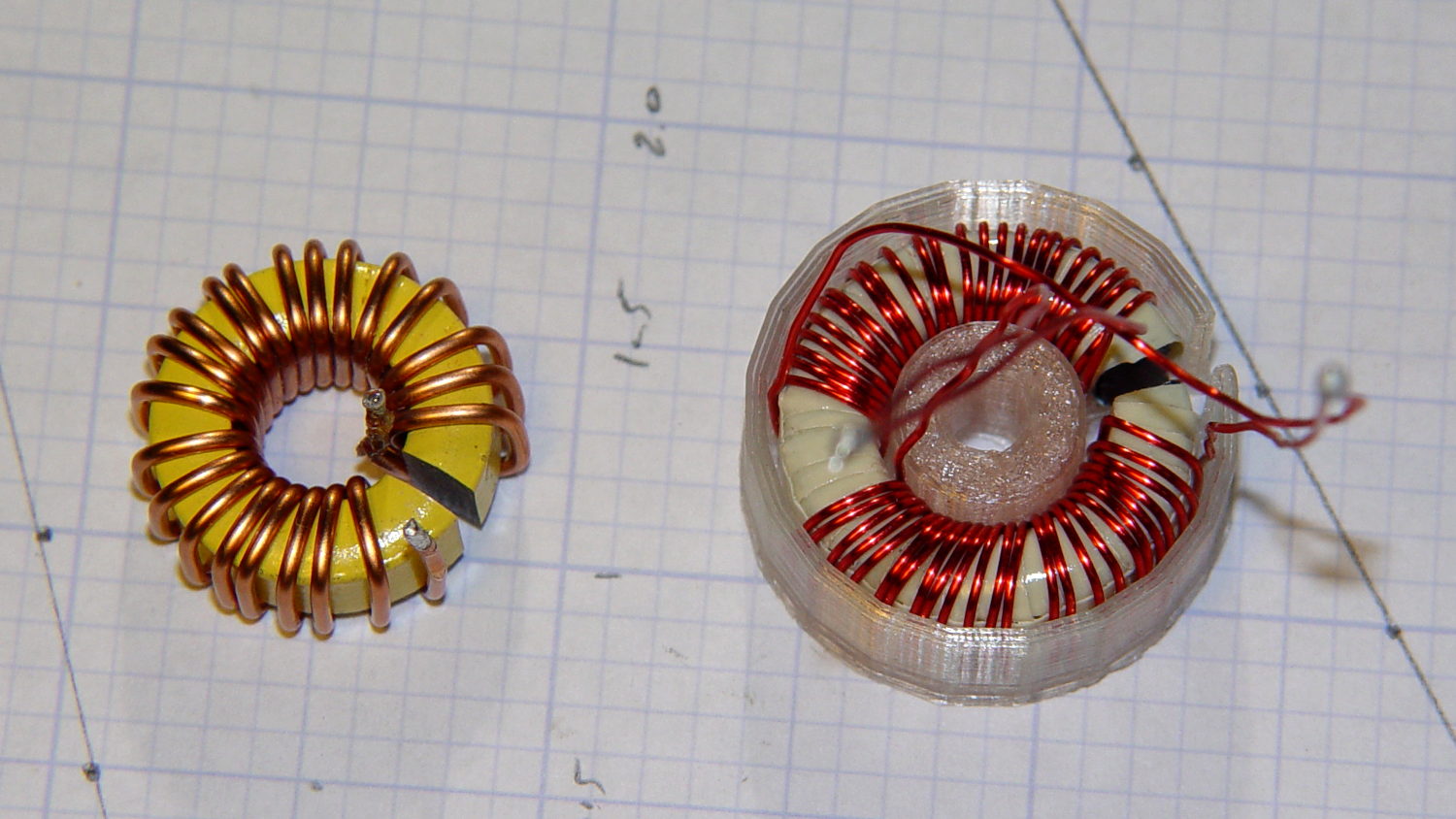
Removing the damaged sections left 22 turns. For comparison, I converted the 56 turn ferrite toroid into a 25 turn model by paralleling two 25 turn sections:
Slit toroids – iron – ferrite
The enamel wire on the iron toroid measures 40 mil diameter, close enough to 18 AWG.
Paralleling two 24 AWG windings on the ferrite toroid produces twice the copper area of a single winding, so the resistance is the same as a single 21 AWG winding (3 AWG steps = factor of two area change). That’s three steps smaller than the 18 AWG on the iron toroid, so the resistance is a factor of two larger than the heavier wire.
The paralleled winding has the advantage of reducing the power dissipation required to produce the same magnetic flux density, without the difficulty of winding heavier wire. That may not actually matter, given the relatively low currents required by the motor in normal operation.
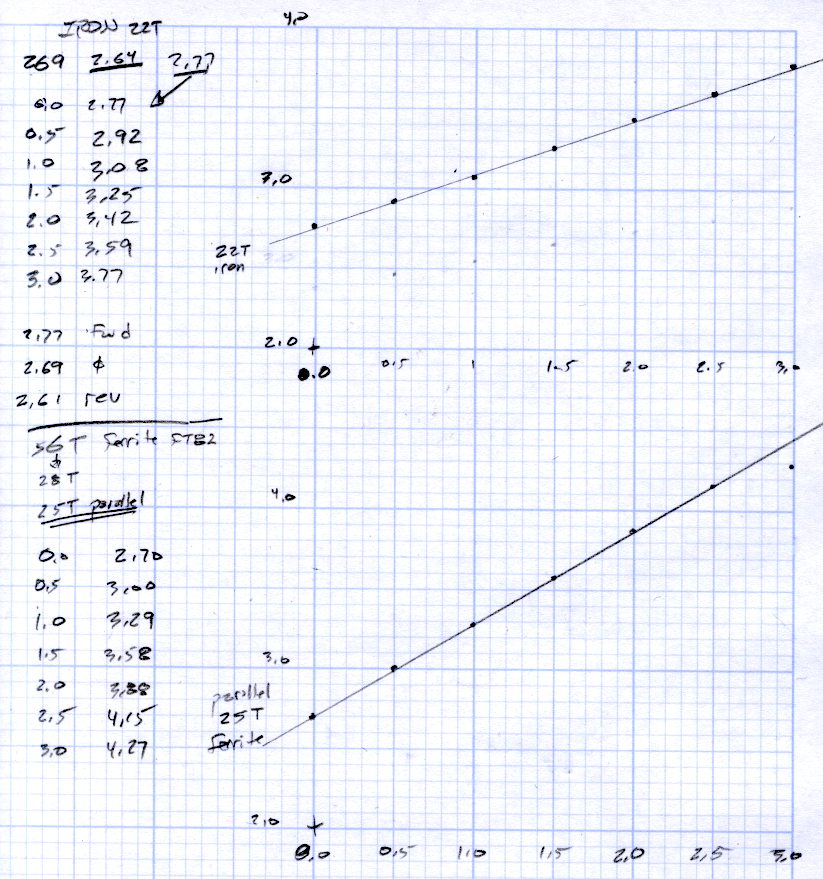
Wedging a Hall sensor into the gaps and stepping the current produced two useful graphs:
Iron and ferrite toroids – Hall sensor output
The iron toroid has lower permittivity (less flux density for a given magnetizing force), which means the full-scale range exceeds 3 A and the useful range up to 1 A covers only 300 mV.
The last point on the ferrite curve shows the Hall sensor output saturating just over 4 V, with 1.5 V of range.
The slope, in mV/A
Powdered iron: 340
Ferrite: 540
Boosting the slope of the powdered iron by 25/22 gives 386 mV/A, so the iron permeability really is 70% of the ferrite. That’s modulo the gap size, of course, which surely differs by enough to throw out all the significant digits.
Obviously, an op amp circuit to remove the offset and rescale the output to 0-5 V will be in order.
The previous graph for the ferrite toroid with the complete 56 turn winding shows, as expected, about twice the output of this 25 turn version:
FT82-43 – 56 turns – 24 AWG
The linear part of that line is 1375 mV/A, although I can’t vouch that the data came from the same Hall effect sensor. Scaling it by 25/56 gives 613 mV/A, suggesting it’s not the same sensor.
Having developed an emotional attachment to the ferrite toroid, I’ll use it in the first pass of the current feedback circuit. If the motor need a bit less sensitivity or lower resistance, the powdered iron toroid looks like a winner.
Memo to self: Always degauss iron toroids before slitting!
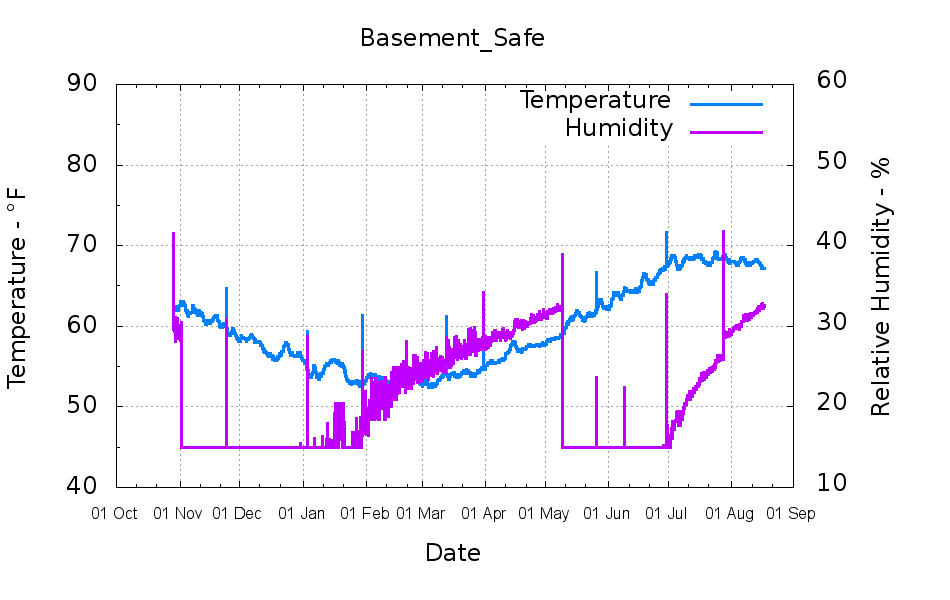
The desiccant definitely lasts longer during the winter, even though the dehumidifier fights the basement air to a standstill around 55%RH during the summer.
Each desiccant bag contains 500 g of silica gel and the most recent one adsorbed 73 g of water.
A Squidwrench Weekly Doings being useful for short-attention-span projects, I measured the DC current gain for all five ET227 transistors. The test conditions fall far below the ET227’s 1 kV / 100 A ratings, but they’re roughly what the sewing machine motor controller calls for.
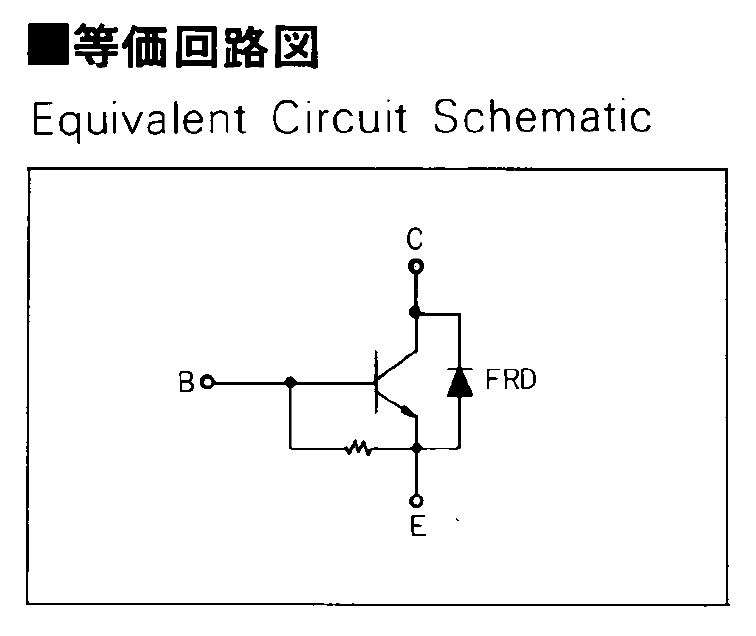
The transistors don’t even begin to turn on until IB gets over about 50 mA, because there’s a 13 Ω shunt resistor (as measured, for either polarity) between the base and emitter terminal:
Fuji ET227 – equivalent circuit
In the ET227’s normal use, that resistor dumps the Miller effect charge injected from the collector (with the intent of improving the switching time), but you must ram nearly 70 mA into the resistor to get 900 mV at the base, so the actual transistor base current isn’t all that high for low collector currents. But you measure gain by dividing goes-outa by goes-inta, so that’s what I’ll do.
The ET227 needs something like IB = 30 A to switch 100 A at the collector, so a few dozen mA into that resistor rounds off to zilch for its usual driver circuit. FWIW, with IB = 30 A, VBE tops out at 2 V: the resistor carries 150 mA and dissipates 300 mW.
Anyhow, randomly labeling the transistors from A (on the heatsink) through E, then hitching them up to a 1.8 A bench supply with a 33 Ω resistor to the base terminal provided some readings at single-digit collector voltages.
For IB = 72 mA:
IB
IC
hFE
A
72
490
6.8
B
73
540
7.4
C
74
480
6.5
D
75
440
5.9
E
76
520
6.8
For IB = 108 mA, with one bumped-knob outlier:
IB
IC
hFE
A
108
1220
11.3
B
101
1190
11.8
C
108
1280
11.9
D
108
1170
10.8
E
108
1320
12.2
Although the gain around 1 A comes out slightly higher than while running the motor, it’s in the same ballpark. This is not a high-gain device: it’ll need a driver after the optoisolator to squeeze enough current through the collector.
Eks tried to unload a huge old Tek transistor curve tracer on me that would be ideal for this sort of thing. I’m still not tempted…