Eks found some heavy-duty ET227 NPN transistors in his heap and put them on the basement steps for me … months ago, because he knew I’d be needing them.
Mounting an ET227 on a massive CPU heatsink with thermal compound and wiring it in place of the failed MOSFET produces this lashup:

The base drive comes directly from a bench supply and the collector sees full-wave rectified 120 VAC from the isolated Variac. The maximum base current rating of 40 A at DC suggests it’ll be difficult to screw this one up. The rectifier bridge doesn’t dissipate enough power to warm up, even without a heatsink.
The SOA plot from the ET227 datasheet has the expected 1 kV and 100 A limits that you can’t actually reach under most conditions:
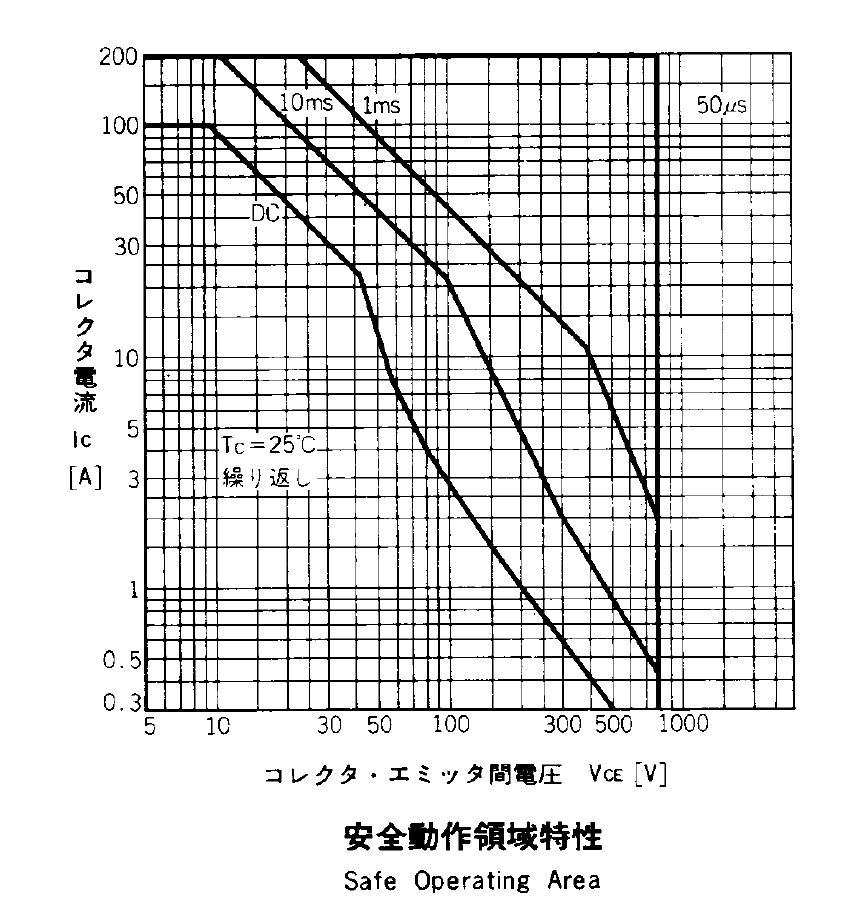
The Kenmore 158 motor has a DC resistance of about 50 Ω, so the locked-rotor current won’t be more than about 3 A. The motor current runs around 700 mA with a voltage drop across the transistor ranging from 20 V to 50 V at normal operating conditions, so it’s just barely within the DC SOA. So far, my efforts to kill it by stalling the motor have been unavailing; I have four spares and Eks has at least five more in his heap.
The ET227 has a 960 W (!) maximum dissipation on an ideal heatsink, so the piddly 35 W it might see here doesn’t amount to much. The heatsink should have a quiet demand-driven fan.
The operating current is offscale low along the left edge of the DC Current Gain plot, which suggests a DC gain under 10:
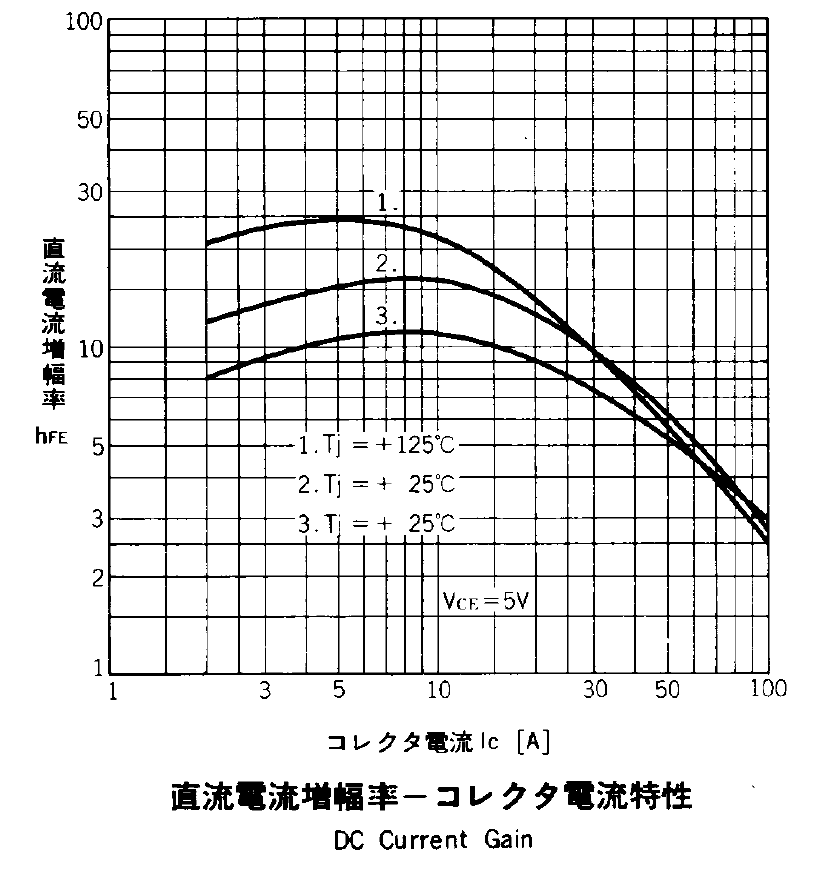
As it turned out, the gain was around 7, with 100 mA base drive producing 700 mA of collector current at VBE = 0.9 V, although that comes from the bench supply’s low-res meters. There being an exponential relation between the bench supply’s voltage output and the transistor’s base current, along with the motor’s square-law positive feedback, speed control was mmmm touchy.
So the challenge will be stuffing 100 mA into a 1 V base voltage, with much better resolution and much less ripple than the usual Arduino PWM output, from an isolated supply. Given the amount of power I’m willing to burn in the ET227, a few more watts of base drive won’t make a bit of difference.
Perhaps the best way to handle all the nonlinearities in the current control path will be an isolated current feedback monitor. Hello, Hall effect sensors … [sigh]

Comments
9 responses to “Kenmore 158: NPN Transistor vs. Rectified 120 VAC”
40A base current? That’s hardcore. A friend of mine (inadvertently) attempted to do something like that with a 2N2222 once, with predictable results. Looks to me like you’re well within the SOA (not “just barely”), but I could be misreading something. I’m unsure why there are two (different) curves for Tj=+25°C in the current gain graph.
Looks like the #3 curve label is a typo. Couldn’t find a Tj(op) spec, but the storage min is -40. I’d guess -40 or 0C. I suspect the transistor wouldn’t care either way.
If I were building that graph, I could change -25 °C to +25 °C in the blink of an eye… [sigh]
The gotcha happens with a current limit and a locked rotor, where the repetitive peak voltage hammers the transistor.
I think the worst case is around 1 A: the windings drop about 50 V and leave maybe 150 V peak (figuring a 200 V peak high-line voltage) across the transistor. That’s wedged just under the DC limit, although the transistor burns barely 50 W averaged across the peaks.
The stall point crawls up along the SOA and makes a turn to the left above 2 A. I must actually run all those numbers, but, frankly, I doubt I could kill that thing with a hammer…
Eks gave me five of those bad boys, all paralleled on the original base and emitter bus bars: solid copper straps half an inch wide and 1/16 inch thick. I don’t know if they were switching 1 kA peak through an assembly at 1 kV standoff, but … yeah, way scary.
“best way to handle all the nonlinearities in the current control path will be an isolated current feedback monitor”
Yes.
Are you thinking digital like Current sensor -> ADC -> uC -> DAC -> bsse drive?
Or some kind of analog feedback?
Isn’t speed the ultimate output goal? Maybe use some kind of tach or gear-tooth sensor in an outer loop? Or maybe operators are used to controlling torque?
Analog feedback FTW!
Given that hulking transistor, I foresee an optoisolator driving a PNP amp for the base current and a Hall effect sensor reporting collector current. That doesn’t require much circuitry on the hot side and provides galvanic isolation pretty much for free. A +12 V 1 A power supply is $5 ($2 without the case!) from halfway around the planet, so that’ll run the booster and fan.
A 1/rev sensor on the motor should suffice for speed control, but closing / linearizing the current loop seems like a Good Thing. Besides: Hall effect! [grin]
“Besides: Hall effect!”
Ever look at these Hall effect all-in-one solutions from Allegro, the ACS714 family? They bundle a 1.2 milliohm current path next to a Hall effect sensor and a chopper-stabilized post amp — and offer 2.1kV isolation. The output is 66 – 185 mV/A, factory trimmed to within a couple of percent or better.
Nice parts. I had a client use the 20A part in a control loop for a high-current AC heater.
The 5 Amp part might do the trick here. Just a thought.
And they’re cheap, too: under two bucks when you buy 3000 from Digikey and five bucks in onesies. For a real application, I’d be on those like static cling, because they bottle up all the fussy details in one tidy package that’s actually hand-solderable.
Pololu has the 30 A 66 mV/A and 5 A 185 mV/A chips on breakout boards for ten bucks, which seems like a pretty good deal, too. They caution that the design voltage is 30 V, although they might be trying to ward off liability rather than describe design limits.
Here, I can saw ferrite toroids, figure saturation field strengths, and generally have more fun than any one person really should… [grin]