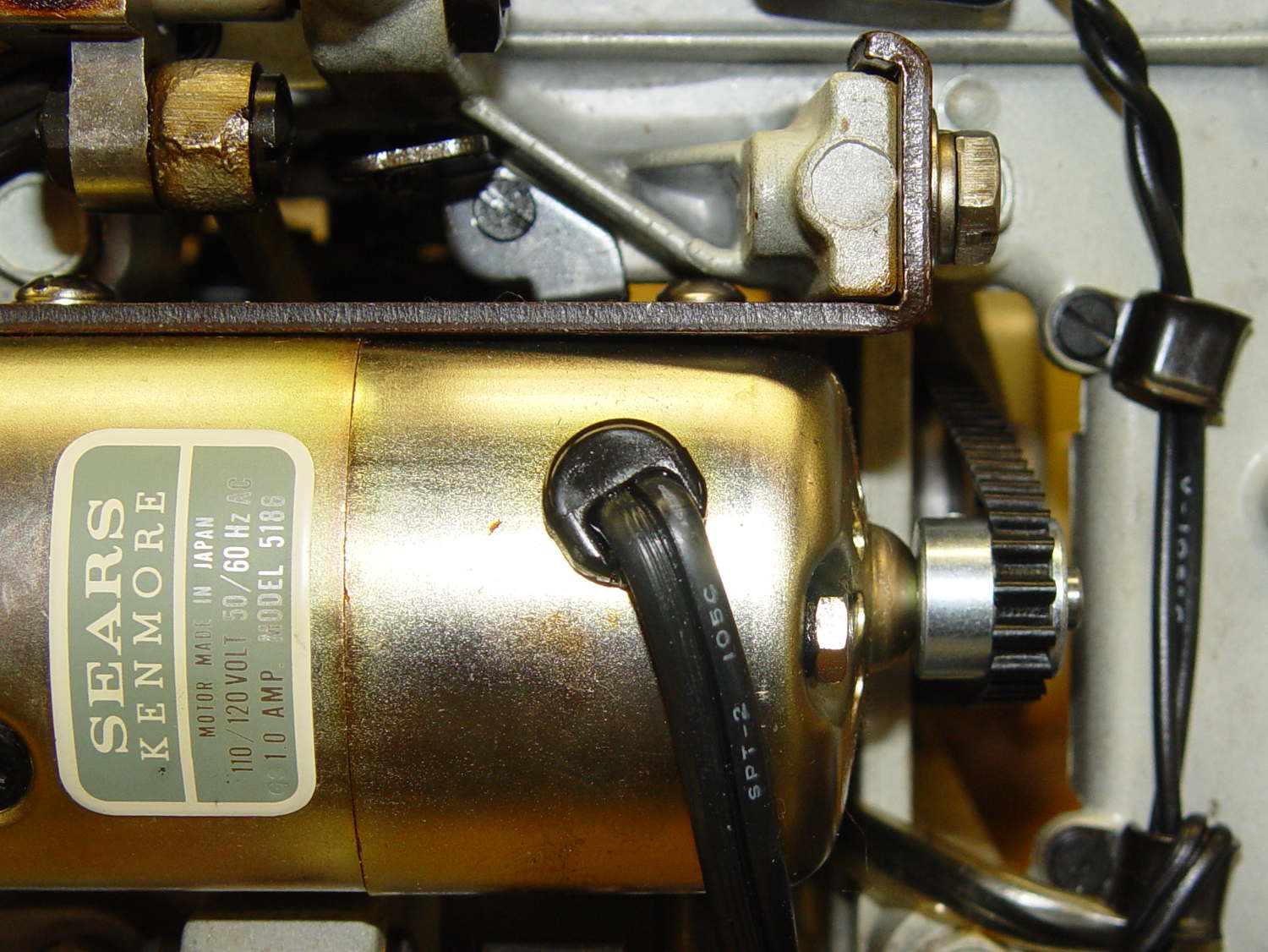
The Kenmore Model 158 sewing machine contains a 120 VAC / 1 A motor that powers all the moving parts through a V belt:

Looking up through the body:
A double pulley on a jackshaft reduces the motor speed on the way to the handwheel:

The motor and handwheel turn counterclockwise in normal operation, but can be turned clockwise by hand as needed. The belt tension isn’t very high and the jackshaft pulleys can slip, but I’m not sure if that’s intentional or the result of several decades of runtime.
Despite the cogged belt, the pulleys are smooth; it’s not a positive-drive transmission with timing-belt pulleys.
The belts:
- Sears part numbers: top 30083, bottom 28908 / 50013
- 6 mm at the top of the pulley
- 4 mm at the base of the V
- 3.5 mm thick
You could, if you had to, run a belt from the handwheel directly to the motor, although the pulley would ride about 7 mm further out on the shaft. I have no way to measure the lengths with any confidence in the results; one could calculate the lengths based on pulley diameters and center spacing.
Sticking retroreflective tape on the pulleys and handwheel, then deploying the laser tachometer, provides some minimum and maximum speeds:
- Motor: 2100 – 8500 rpm
- Jackshaft: 800 – 3200 rpm
- Handwheel: 200 – 930 rpm
Those aren’t entirely consistent, because I’m using the old foot pedal speed control with its defunct carbon disks; the low end, in particular, isn’t as slow as it can go.
In any event, there’s about a 10:1 speed reduction from motor to handwheel.
The motor label clearly states that it’s 100-120 V AC, but it has brushes, so it’s actually a universal-wound motor that should run happily on DC.

Comments
2 responses to “Kenmore 158: Motor, Belts, and Pulleys”
Work it up with a nice size stepper ( http://www.ebay.com/itm/151331976530 ).
A benefit, which Mary would love, though she does not know it yet: the stepper could be programmed to always stop with the needle a the bottom of the stroke (for sharp turns). A quick tap on the pedal could advance to exactly the top of the stroke (for ending the stitch).
With a stepper and digital control, you could also have rock solid low-speed movement.
If you got fancy you could do broken thread detection (it was the the start of the Toyota Way) — probably easy on the top end, difficult but more useful on the bobbin.
Stay tuned… [grin]
Not to telegraph the punchline, but her hearing is much better than mine and even I think a stepper is entirely too noisy. Haven’t tried a brushless DC motor yet, but I fear it’d sound about the same.
Needle position sensing is, as the NASA folks say, in work.