Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Tag: Improvements
Making the world a better place, one piece at a time
The stiffness of the bike helmet mirror mount suggested a similar clamp would have enough griptivity to immobilize the ball while cutting it in the lathe:
Helmet Mirror Mount – 10 mm ball
Building the clamp around the lathe’s three-jaw lathe chuck eliminates the need for screws / washers / inserts:
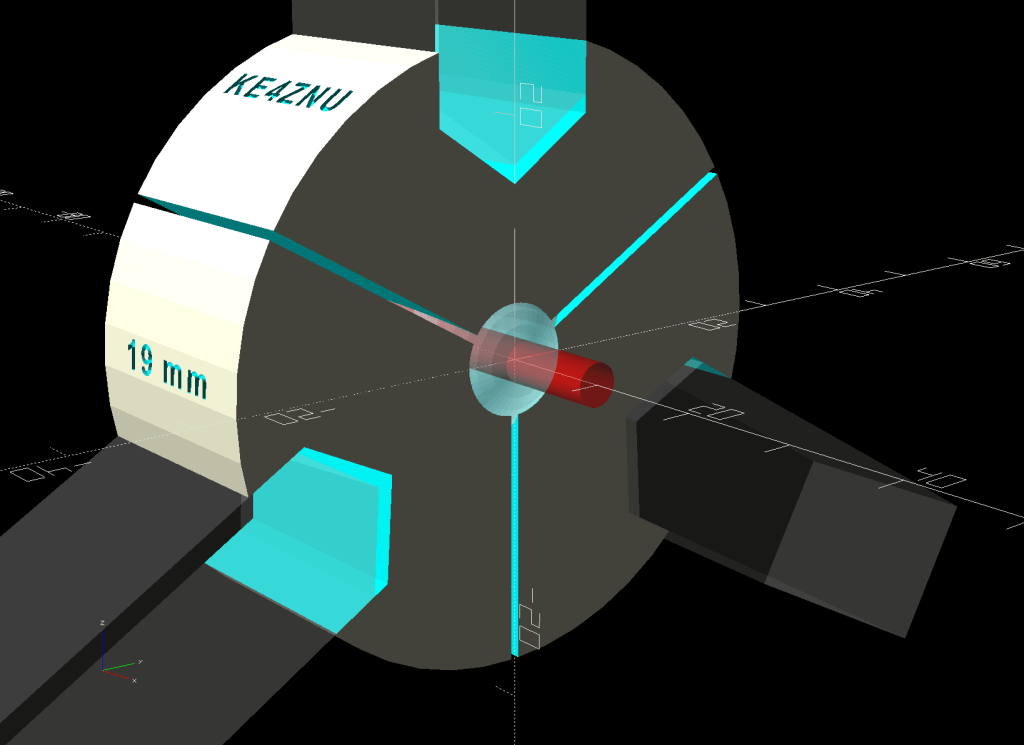
Lathe Ball Fixture – 19 mm – Show
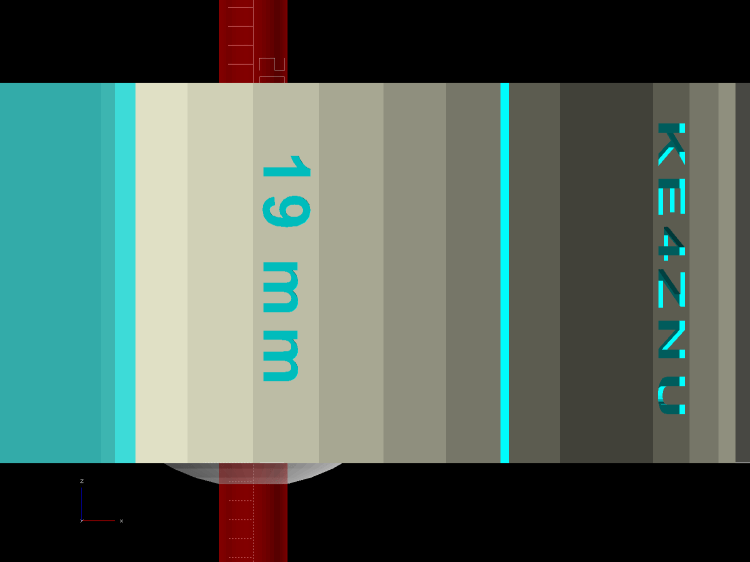
The Ah-ha! moment came when I realized the fixture can expose half of the ball’s diameter for drilling while clamping 87% of its diameter, because 0.5 = sin 30° and 0.87 = cos 30°:
Lathe Ball Fixture – 19 mm – Show – front orthogonal
That’s an orthogonal view showing 13% of the ball radius sticking out of the fixture; it’s 6% of the diameter.
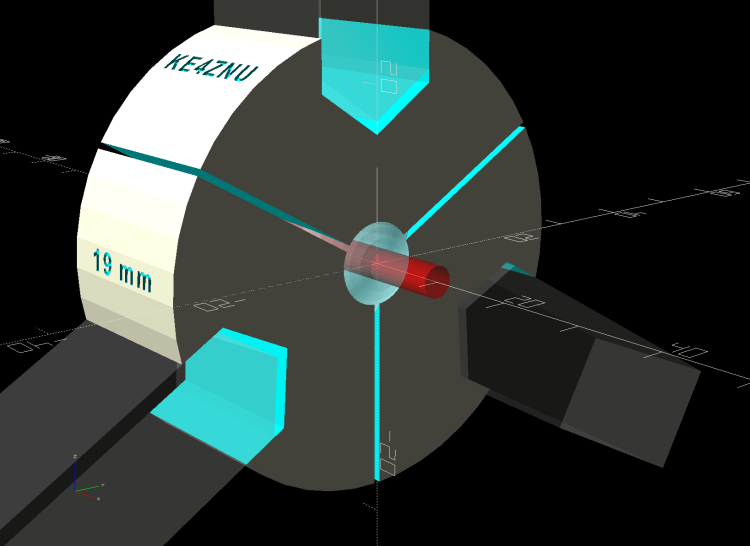
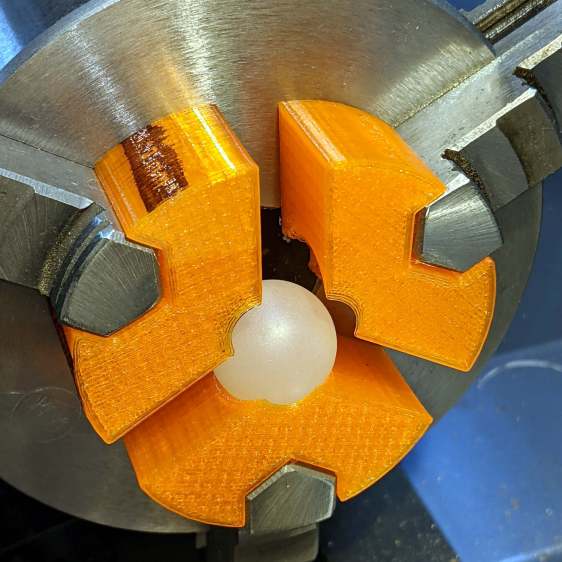
Which looks like this in real life:
Lathe Ball Fixture – 19 mm – sections with ball
The socket is offset toward the tailstock end of the clamp (on the right in the picture) to expose half its diameter flush with the surface perpendicular to the lathe axis. The other side necks down into a cylinder of the same diameter to clear the drill bit.
This works nicely until the ball diameter equals the chuck jaw’s 20 mm length, whereupon larger balls protrude into the chuck body’s spindle opening. Although I haven’t yet built one, the 25 mm balls in my Box o’ Bearings should fit, with exceedingly sissy cuts required for large holes.
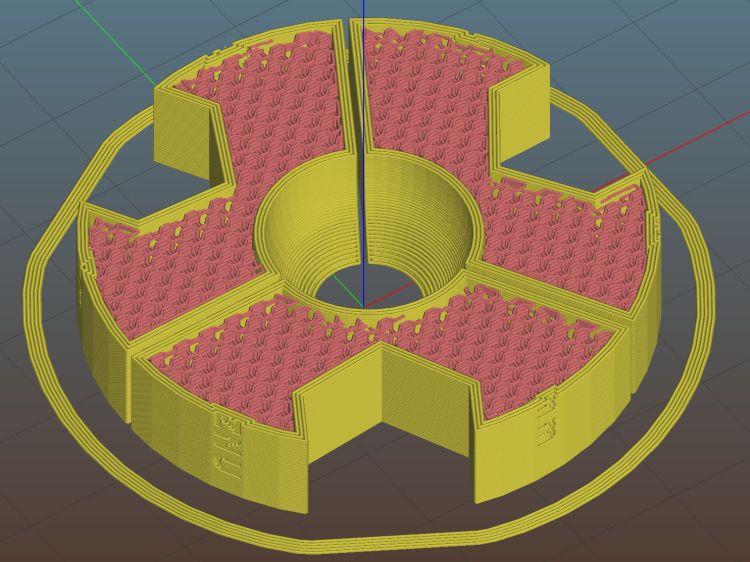
The fixture doesn’t require support material, because the axial holes eliminate the worst of the overhang. Putting the tailstock side flat on the platform gives it the best-looking surface:
Lathe Ball Fixture – 19 mm – Slic3r – equator
The kerf between the segments ensures the jaws can apply pressure to the ball, whereupon the usual crappy serrated 3D printed surface firmly grabs it.
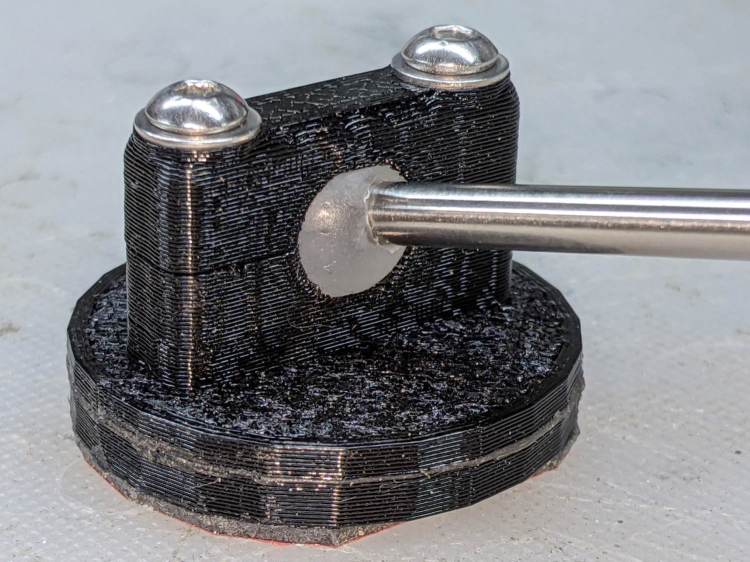
The fixture is a slip fit on the chuck jaws:
Lathe Ball Fixture – 19 mm – installed
Tightening the jaws shoves them all the way into the fixture’s slots and clamps the ball:
Lathe Ball Fixture – 19 mm – center drill
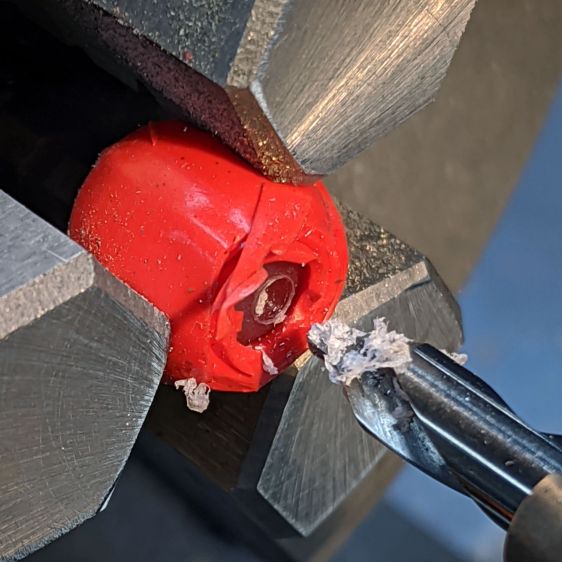
Overtightening the chuck will (probably) compress the ball around the drill, which will (best case) give you slightly oversize holes or (worst case) cause the ball to seize / melt around the drill bit, so sleaze up to the correct hole diameter maybe half a millimeter at a time:
Lathe Ball Fixture – 19 mm – 6 mm drill
That fixture exposes 9.5 mm = 19/2 of the ball. The drill makes a 6 mm hole to fit the telescoping shaft seen above.
Obviously, you must build a custom fixture for every ball diameter in your inventory, which is no big deal when you have a hands-off manufacturing process. Embossing the diameter into the fixture helps match them, although the scribbled Sharpie isn’t particularly elegant.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Zenni ships their glasses in a snap-close case with a fuzzy insert on the bottom, but after you unpack the cleaning cloth and suchlike, the glasses rattle against the hard plastic top.
Make trial fit prototype from thin cardboard and trace it onto a sheet of craft foam:
Eyeglass case foam padding – outline
The pen, much favored by quiltists, has a white ceramic lead that washes out of dark fabrics. You can find a corresponding dark-lead pen, but I can use an ordinary pencil.
Use different colors for different glasses:
Eyeglass case foam padding – installed
Then walk ninja-style again.
Protip: slip an address label atop the foam so a nice person can reunite you with your glasses, should they slip out of your pocket in the unlikely event you sit down anywhere other than in your house.
For reasons not relevant here, I sent the Beckman DM73 to a good home in Europe. Having some experience with the brutality applied to innocent packages by various package-delivery organizations, I filled a Priority Mail Flat Rate Small Box with a solid block of corrugated cardboard:
DM73 – cardboard armor
One inner layer has a cutout for the manual:
DM73 – Operator Manual package
The meter and its leads tuck into form-fitting cutouts:
Beckman DM73 – cardboard packing
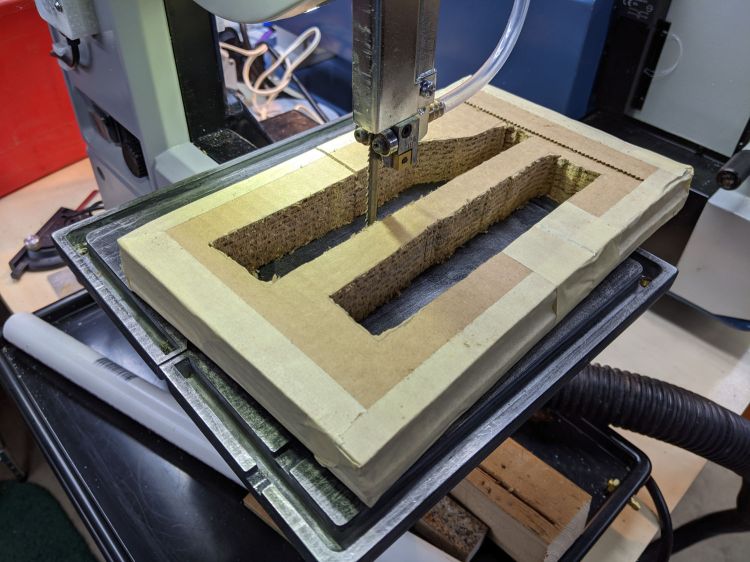
I bandsawed the cutouts from a block with enough layers for some space on the top and bottom:
DM73 – bandsawing cardboard package
After mulling that layout overnight, I made a similar block with the saw cuts on diagonally opposite corners, so pressure on the center of the edges won’t collapse the unsupported sides. A slightly larger meter cutout allowed a wrap of closed-cell foam sheet that likely doesn’t make any difference at all.
With everything in place, the box had just enough space for a pair of plastic sheets to better distribute any top & bottom impacts.
I won’t know how the armor performed for a few weeks, but it’s definitely the best packaging idea I’ve had so far.
Update: After nearly two weeks, the package arrived undamaged and the meter was in fine shape. Whew!
According to the Arducam doc, their Motorized Focus Camera has a 54°×41° field of view, (roughly) equivalent to an old-school wide(-ish) angle 35 mm lens on a 35 mm still camera. For my simple purposes, the camera will be focused on objects within maybe 200 mm:
Arducam Motorized Focus Camera – desktop test range
The numeric keys are 6.36 mm = ¼ inch tall, the function keys are 5.3 mm tall, and the rows are 10 to 11 mm apart.
The focusing equation converting distance to lens DAC values depends critically on my crude measurements, so the focus distance accuracy isn’t spot on. Bonus: there’s plenty of room for discussion about where the zero origin should be, but given the tune-for-best-picture nature of focusing, it’s good enough.
I set the CANCEL legend at 50 mm and it’s in good focus with the lens set to that distance:
Arducam Motorized Focus Camera – 50 mm
Focusing at 55 mm sharpens the ON key legend, while the CANCEL legend remains reasonably crisp:
Arducam Motorized Focus Camera – 55 mm
Adding another 5 mm to focus at 60 mm near the front of the second row shows the DoF is maybe 15 mm total:
Arducam Motorized Focus Camera – 60 mm
Focusing at 65 mm, near the middle of the second row, softens the first and fourth rows. Both of the middle two rows seem OK, making the DoF about 20 mm overall:
Arducam Motorized Focus Camera – 65 mm
Jumping to 100 mm, near the top of the first function row:
Arducam Motorized Focus Camera – 100 mm
At 150 mm, about the top of the far row just under the display:
Arducam Motorized Focus Camera – 150 mm
I think 200 mm may be the far limit of useful detail for a 5 MP camera:
Arducam Motorized Focus Camera – 200 mm
At 300 mm the DoF includes the mug at 600 mm, but the calculator keyboard is uselessly fuzzy:
Arducam Motorized Focus Camera – 300 mm
At 500 mm, the mug becomes as crisp as it’ll get and the text on the box at 750 mm is entirely legible:
Arducam Motorized Focus Camera – 500 mm
At 1000 mm, which is basically the edge of the desk all this junk sits atop, the mug and text become slightly fuzzy, so the DoF doesn’t quite reach them:
Arducam Motorized Focus Camera – 1000 mm
I limited the focus range to 1500 mm, which doesn’t much change the results:
Arducam Motorized Focus Camera – 1500 mm
I could focus-stack a set of still images along the entire range to get one of those unnatural everything-in-focus pictures.
Arducam Motorized Focus Camera – desktop test range
Run the test code:
# Simpleminded focusing test for
# Arducam Motorized Focus Camera
# Gets events through evdev from rotary encoder knob
# Ed Nisley - KE4ZNU
# 2020-10-20
import sys
import math
import evdev
import smbus
# useful functions
def DAC_from_distance(dist):
return math.trunc(256*(10.8 + 2180/dist))
# write DAC word to camera I2C bus device
# and ignore the omnipresent error return
def write_lens_DAC(bus,addr,val):
done = False
while not done:
try:
bus.write_word_data(addr,val >> 8,val & 0xff)
except OSError as e:
if e.errno == 121:
# print('OS remote error ignored')
done = True
except:
print(sys.exc_info()[0],sys.exc_info()[1])
else:
print('Write with no error!')
done = True
# set up focus distances
closest = 50 # mm
farthest = 500
nominal = 100 # default focus distance
foci = [n for n in range(closest,nominal,5)] \
+ [n for n in range(nominal,250,10)] \
+ [n for n in range(250,1501,25)]
# compute DAC equivalents for each distance
foci_DAC = list(map(DAC_from_distance,foci))
focus_index = foci.index(nominal)
# set up the I2C bus
f = smbus.SMBus(0)
lens = 0x0c
# set up the encoder device handler
# requires rotary-encoder dtoverlay aimed at pins 20 & 21
d = evdev.InputDevice('/dev/input/by-path/platform-rotary@14-event')
print('Rotary encoder device: {}'.format(d.name))
# set initial focus
write_lens_DAC(f,lens,foci_DAC[focus_index])
# fetch I2C events and update the focus forever
for e in d.read_loop():
# print('Event: {}'.format(e))
if e.type == evdev.ecodes.EV_REL:
# print('Rel: {}'.format(e.value))
if (e.value > 0 and focus_index < len(foci) - 1) or (e.value < 0 and focus_index > 0):
focus_index += e.value
dist = foci[focus_index]
dac = foci_DAC[focus_index]
print('Distance: {:4d} mm DAC: {:5d} {:04x} i: {:3d}'.format(dist,dac,dac,focus_index))
write_lens_DAC(f,lens,dac)
Because the knob produces increments of ±1, the code accumulates them into an index for the foci & foci_DAC lists, then sends the corresponding entry from the latter to the lens on every rotary encoder event.
And then It Just Works!
The camera powers up with the lens focused at infinity (or slightly beyond), but setting it to 100 mm seems more useful:
Arducam Motorized Focus Camera – 100 mm
Turning the knob counterclockwise runs the focus inward to 50 mm:
Arducam Motorized Focus Camera – 50 mm
Turning it clockwise cranks it outward to 1500 mm:
Arducam Motorized Focus Camera – 1500 mm
The mug is about 300 mm away, so the depth of field extends from there to infinity (and beyond).
It needs more work, but now it has excellent upside potential!
Name: gpio-key
Info: This is a generic overlay for activating GPIO keypresses using
the gpio-keys library and this dtoverlay. Multiple keys can be
set up using multiple calls to the overlay for configuring
additional buttons or joysticks. You can see available keycodes
at https://github.com/torvalds/linux/blob/v4.12/include/uapi/
linux/input-event-codes.h#L64
Load: dtoverlay=gpio-key,<param>=<val>
Params: gpio GPIO pin to trigger on (default 3)
active_low When this is 1 (active low), a falling
edge generates a key down event and a
rising edge generates a key up event.
When this is 0 (active high), this is
reversed. The default is 1 (active low)
gpio_pull Desired pull-up/down state (off, down, up)
Default is "up". Note that the default pin
(GPIO3) has an external pullup
label Set a label for the key
keycode Set the key code for the button
Snuggle the button configuration next to the encoder in /boot/config.txt:
I haven’t yet discovered where the label text appears, because I picked a keycode defining the button as the decimal point key on a numeric keypad. Perhaps one could create a unique key from whole cloth, but that’s in the nature of fine tuning. In any event, pressing / releasing the button produces key-down / key-up events just like you’d get from a real keyboard.
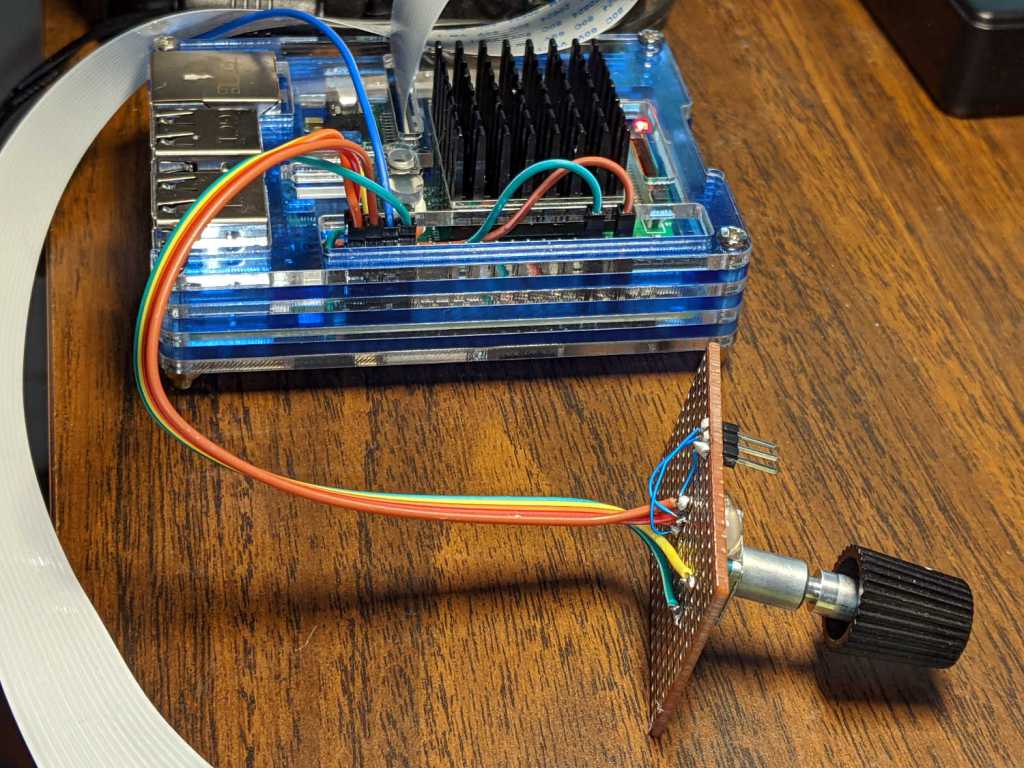
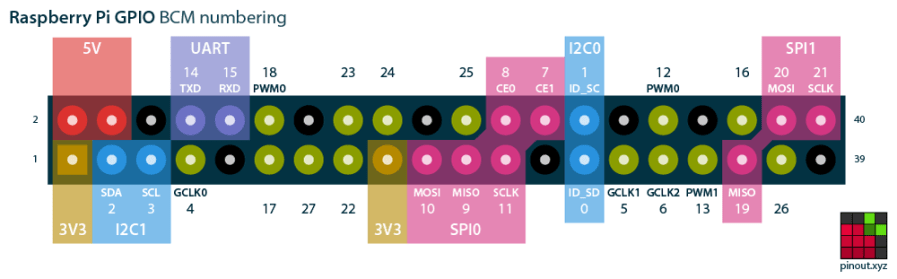
The four pins required for the encoder + switch make a tidy block at the right (in this view, left as shown above) end of the RPi’s header:
Raspberry Pi pinout
If you needed the SPI1 hardware, you’d pick different pins.
Reboot that sucker and another input device appears:
ll /dev/input/by-path/ total 0 lrwxrwxrwx 1 root root 9 Oct 18 10:00 platform-button@1a-event -> ../event0 lrwxrwxrwx 1 root root 9 Oct 18 10:00 platform-rotary@14-event -> ../event2 lrwxrwxrwx 1 root root 9 Oct 18 10:00 platform-soc:shutdown_button-event -> ../event1
As with the encoder device, the button device name includes the hex equivalent of the pin number: 26 decimal = 0x1a.
Run some code:
# Keypress from Raspberry Pi GPIO pin using evdev
# Add to /boot/config.txt
# dtoverlay=gpio-key,gpio=26,keycode=83,label="KNOB"
import evdev
b = evdev.InputDevice('/dev/input/by-path/platform-button@1a-event')
print('Button device: {}'.format(b.name))
print(' caps: {}'.format(b.capabilities(verbose=True)))
print(' fd: {}'.format(b.fd))
for e in b.read_loop():
print('Event: {}'.format(e))
if e.type == evdev.ecodes.EV_KEY:
print('Key {}: {}'.format(e.code,e.value))
Which produces this output:
Button device: button@1a
caps: {('EV_SYN', 0): [('SYN_REPORT', 0), ('SYN_CONFIG', 1)], ('EV_KEY', 1): [('KEY_KPDOT', 83)]}
fd: 3
Event: event at 1603036309.683348, code 83, type 01, val 01
Key 83: 1
Event: event at 1603036309.683348, code 00, type 00, val 00
Event: event at 1603036310.003329, code 83, type 01, val 00
Key 83: 0
Event: event at 1603036310.003329, code 00, type 00, val 00