Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Without looking at the captions, match each of the following pictures with its description:
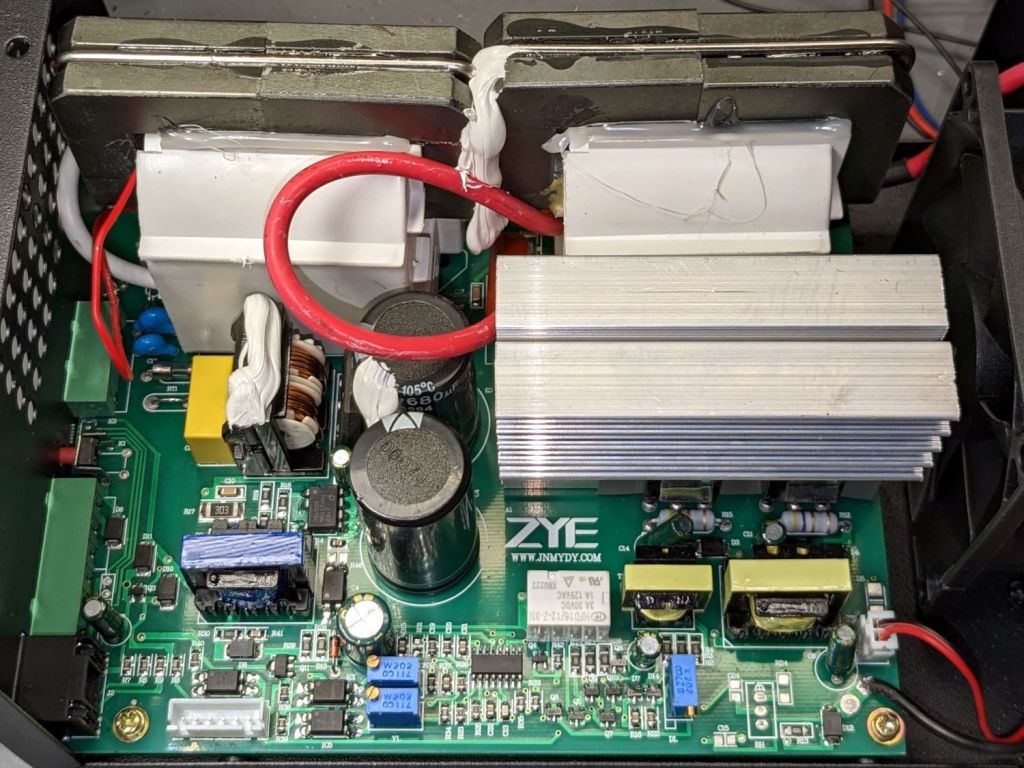
a failed ZYE MYJG60W-Y-1 (came with OMTech laser)
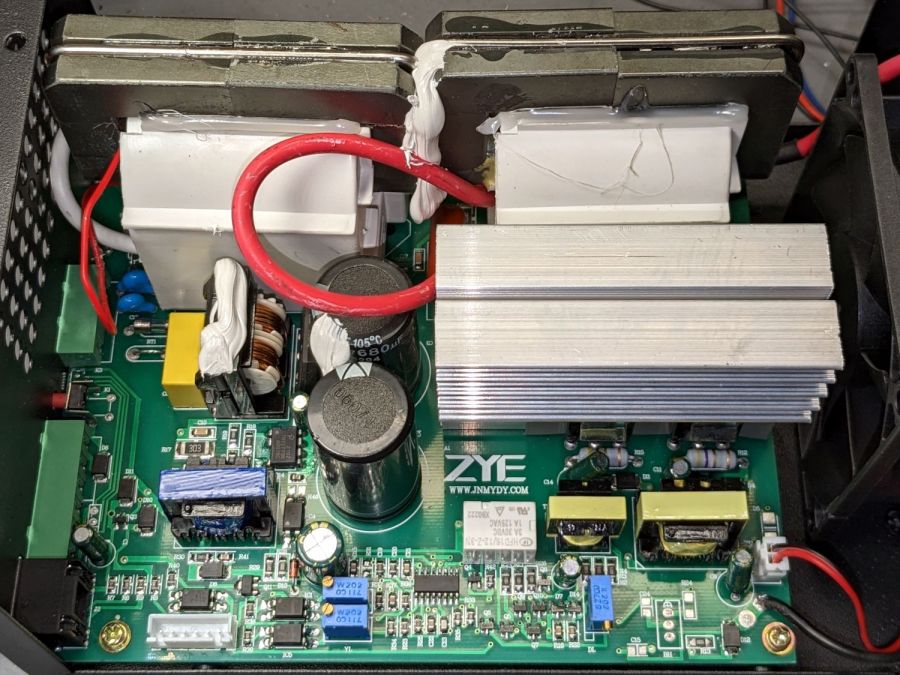
an unbranded MYJG60W replacement from OMTech
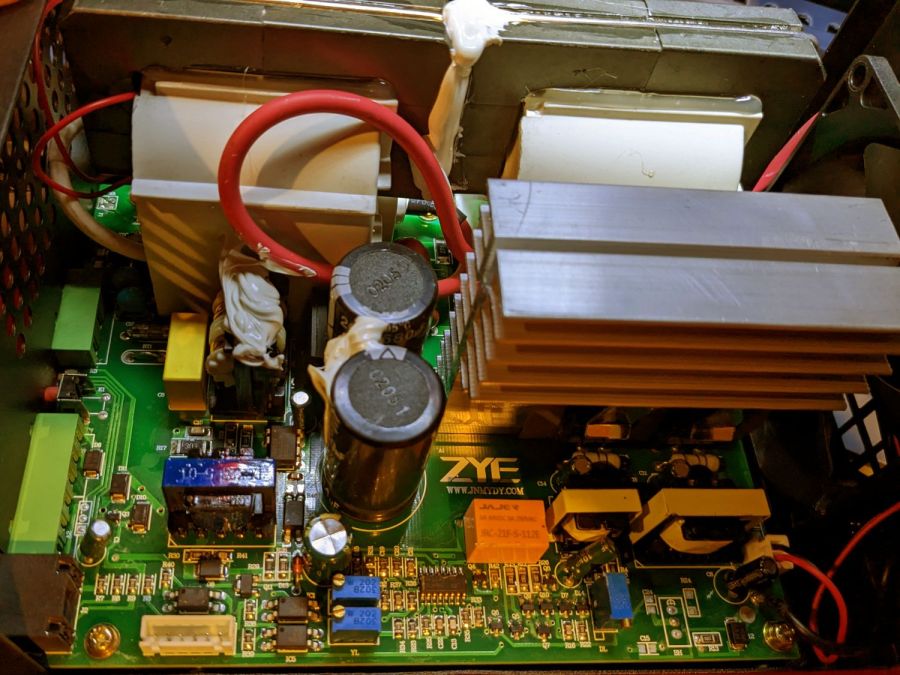
a Cloudray M60 (bought as a backup)
HV Power Supply – ZYE MYJG60W-Y-1 – failedHV Power Supply – unbranded MYJG60WHV Power Supply – Cloudray M60
That was easy, wasn’t it?
As I said in the forum:
My guess is there’s only one ZYE factory (or a dozen clones) producing all the power supplies, then applying whatever sticker the order calls for on the case before dropping it in the carton.
Perhaps Cloudray buys more quality control than the anonymous “brands”, but I wouldn’t lay much money on finding more than two QC bins at the end of the assembly line: either it runs or it doesn’t.
The IR sensor on the under-cabinet LED lights I installed half a dozen years ago became increasingly flaky. Its wall wart power supply was on the hot side of uncomfortably warm, so I had an obvious culprit.
The data plate says it’s UL Listed, which is comforting:
Flypower LED wart – data plate
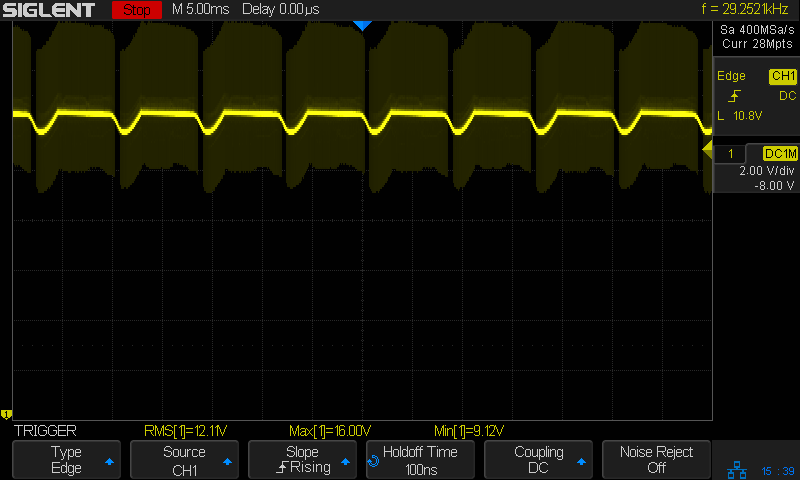
The open-circuit output of a 12 VDC power supply should not look like this:
FlyPower 12V 1A – no load
The horizontal scale is 100 ms/div, so those ramps seem much more languid than you might expect from a 60 Hz wall wart.
Adding a 16 Ω load to draw maybe 750 mA got its attention:
FlyPower 12V 1A – 16ohm load
The average may be 12 V with too-large dips at the expected 120 Hz, but looky at all the hash riding the output!
No wonder the IR sensor was having such a hard time. When the LEDs are off the voltage ramps between 16 and 5 V. When it eventually turns on the supply has impossible noise levels.
So I cracked the case and extracted the electronics:
Flypower LED wart – components
Those caps over there on the left rear don’t look healthy, do they?
Flypower LED wart – failed caps
No. No, they don’t and you shouldn’t be able to see the wiring inside the inductor between them, either.
Probing the Box o’ Wall Warts produced a similar-ish wart that only required harvesting and splicing the teeny coax plug from the failed adapter to put the LED strips back into normal operation.
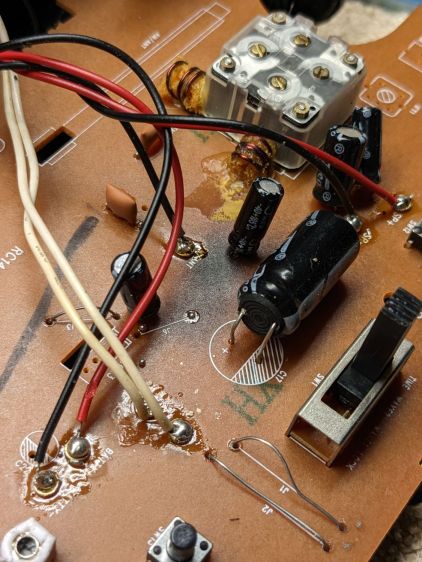
A power failure apparently pushed the ancient RCA alarm clock over the edge into a mode where it ignored its pushbuttons and displayed a time based on a hitherto unknown exoplanet. Popping the case revealed it’s been simmering in its own juices for quite a while:
RCA Alarm Clock – PCB overheat
There’s nothing obviously scorched on the underside of the PCB, although a large SMD resistor might be the source of the problem.
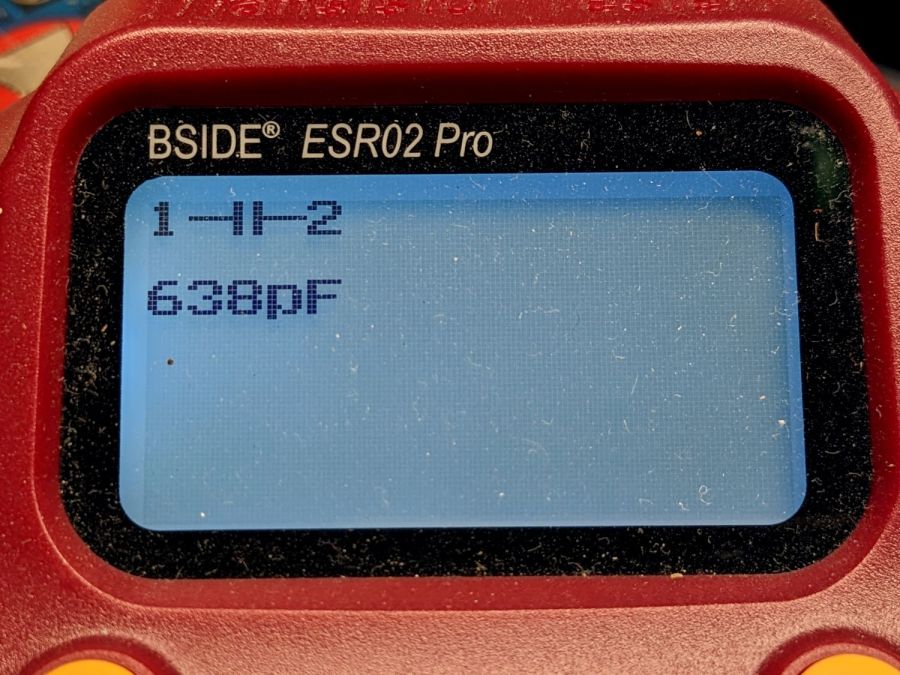
Having been around this block a few times, I unsoldered that big electrolytic cap with its guts protruding from the overwrap:
RCA Alarm Clock – failed cap value
Nope, that’s not really an electrolytic cap any more.
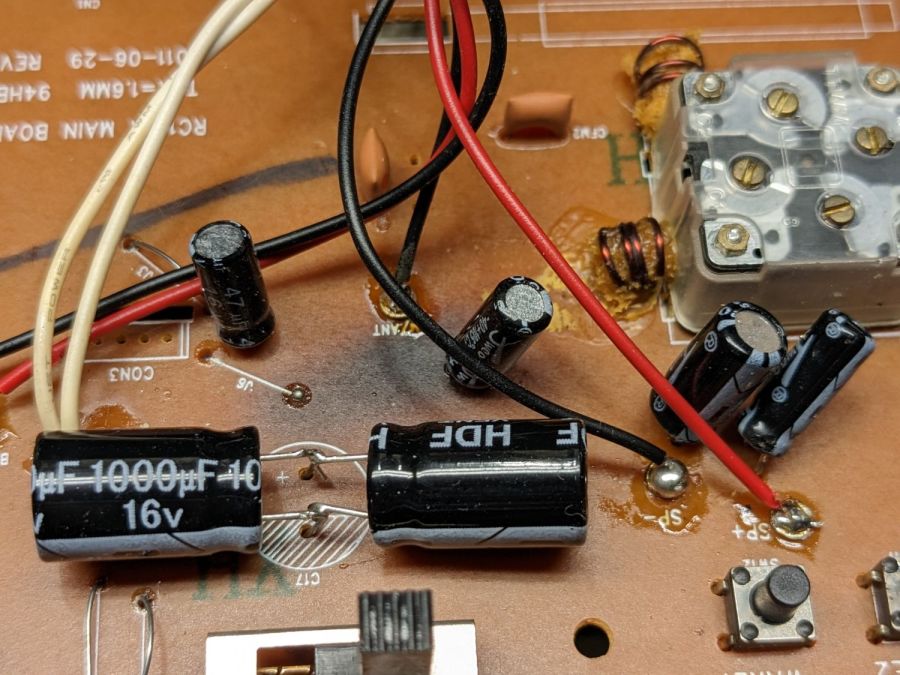
Lacking a 2200 µF cap of suitable voltage rating, but knowing cap tolerances allow for considerable windage, this worked out well enough:
RCA Alarm Clock – replacement caps
Two smaller caps measuring on the low side of OK now reside in the e-waste box.
The white diffuser over the last digit improves it in ways I do not profess to understand, but am pleased to implement:
RCA Alarm Clock – in place
It’s held in place by two strips of LSE tape to see how it reacts to prolonged shear force, no matter how gentle.
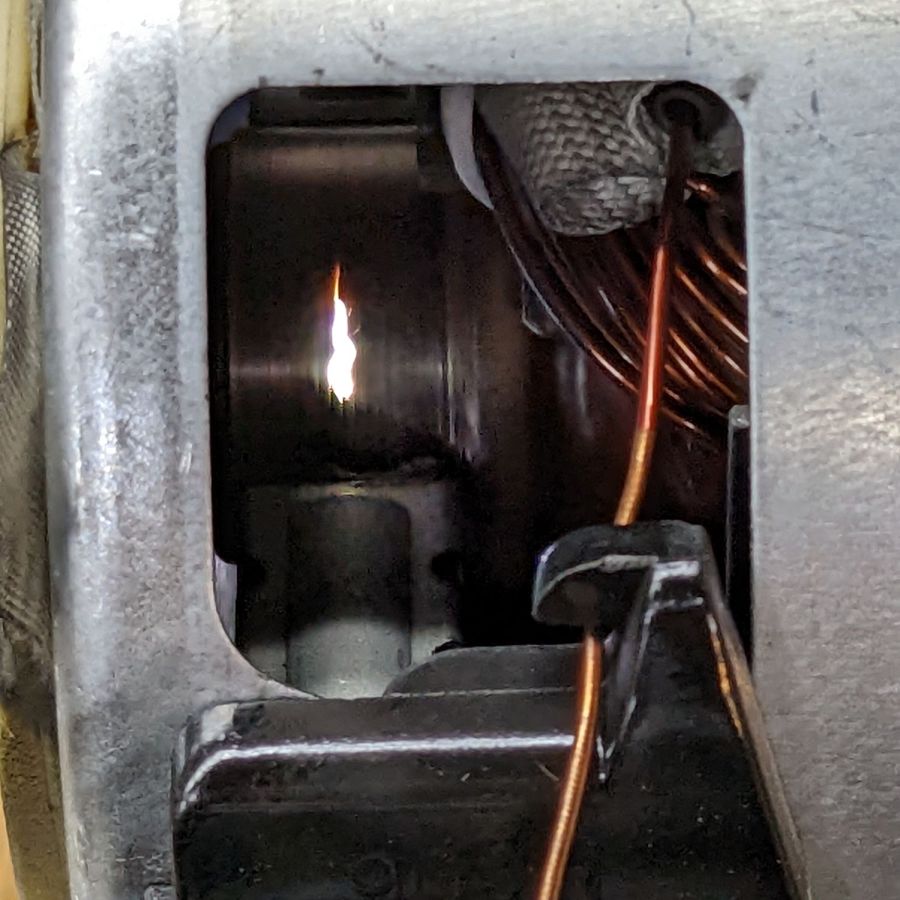
Apparently igniters last about eight years, regardless of provenance, because the igniter just failed, with the usual symptoms of low current draw (about 2 A), failed ignition, and a faint smell of propane (well, mercaptan) before the safety valve kicked in:
Oven igniter – location
The new igniter, another low-buck Amazon offering, came with half a green plastic connector block that mated neatly with the existing half under the oven. Unfortunately, the new wires had female pins crimped on their ends, rather than the male pins required by the existing connector and the ceramic wire nuts I’d used to join the previous igniter to the OEM connector were non-removable.
So I trimmed the old wires to a usable length and applied the new ceramic wire nuts to the stubs:
Oven igniter – connector rewiring
Also as before, the new igniter measures 3 A, definitely below the low end of the valve’s 3.3 to 3.6 A range:
Oven igniter – current test
If this one lasts eight years, I won’t be the guy replacing it …
I know it’s still good, because the label has its 4 lb 7 oz refilled gross weight stamped into it, which is exactly what it weighs today.
Walter Smith Welding Supplies may still be in business, perhaps in Poughkeepsie, but their former 18 Downs St location in Kingston has become Noble Gas Solutions:
Noble Gas Solutions – 18 Downs St Kingston – 2019
Back then, you could call Smith Welding at a four digit phone number in Kingston: 5061. Nowadays, you must call Noble Gas with three more digits: 338-5061. As Charles Stross observed, something like 70% of the future is already in place, because infrastructure is so tenacious.
Heck, just look at that Quonset hut!
Keep calm and extinguish on:
Fyre Freez extinguisher – step 4
Two thoughts spring to mind:
Most kitchen fires start waist-high (it’s the late 1950s: where else would she be?)
She’s gonna lose skin on that metal tank
Seems to me a Fyre Freez will get cold enough to freeze skin while discharging, but I admit to not having actually tried it.
Anyhow, given the overall basement decor, the brackets have the right general style:
Fyre Freez extinguisher – bracket detail
Here’s hoping its future will be as dull as its past …
It’s easy to find the two front screws holding the top in place, although you’ll need either a bendy or offset screwdriver to remove them:
Sears Progressive Vacuum – front case screws
Pull up hard on the cord retraction plunger to remove it, revealing the two rear screws:
Sears Progressive Vacuum – rear case screws
Extract the wires and motor control PCB from their niches:
Sears Progressive Vacuum – motor assembly overview
Prying the latch in the middle of the rear panel (over on the right) releases the motor assembly, which you can then wiggle-n-jiggle upward and out:
Sears Progressive Vacuum – extracting motor assembly
Disconnect the wires, peel off various foam bits, and extract the motor from its carapace. Measure the blower diameter and cut a suitable plywood clamp for the bench vise:
Sears Progressive Vacuum – custom motor clamp
I loves me some good laser cutter action, even when the plywood crate the laser came in doesn’t have much to recommend it:
Sears Progressive Vacuum – failed plywood clamp
I vaguely recall reading the purple tinge comes from the bromine vapor used to dis-insect the wood during manufacturing, before shipping it halfway around the planet.
One area of the commutator looks like it’s in bad shape:
Sears Progressive Vacuum – as-found commutator
Clean the commutator bars in the desperate hope it’s just random crud, even though that seems unlikely, then connect a widowmaker cord to the motor terminals:
Sears Progressive Vacuum – widowmaker line cord
Use a Variac to spin the motor at a (relatively) low speed while watching the brushes and commutator:
Sears Progressive Vacuum – commutator sparking
Now, that is not a nominal outcome.
The cleaned commutator again shows signs of distress:
Sears Progressive Vacuum – scarred commutator
Indeed, measuring the resistance across the line cord terminals shows a shorted winding: 0.0 Ω with the brushes aligned on the bars just antispinward of the scars.
So the motor is definitely, irretrievably dead.
Extracting the brushes shows the arcs have eroded their spinward edges:
Sears Progressive Vacuum – eroded motor brushes
The dark smudge on the windings seems due to internal problems, rather than just the arcs, because the wiring crossing between the commutator and the smudge remains clean:
Sears Progressive Vacuum – charred motor windings
One can buy a used motor assembly on eBay for about $40, with no assurance it doesn’t also have a shorted winding.
The Hakko FX-888 soldering iron perched on the corner of my bench has a little red LED that lights up when it’s heating and goes off when it’s not. Unfortunately, while shutting down after fixing something, I sometimes glance at the thing while the LED is off, whereupon it will patiently keep the iron hot, sometimes for days, until I return.
A recent Squidwrench session gave me the opportunity to yoink that nuisance off the to-do pile where it has been pending since about ten minutes after I unboxed the iron a decade ago.
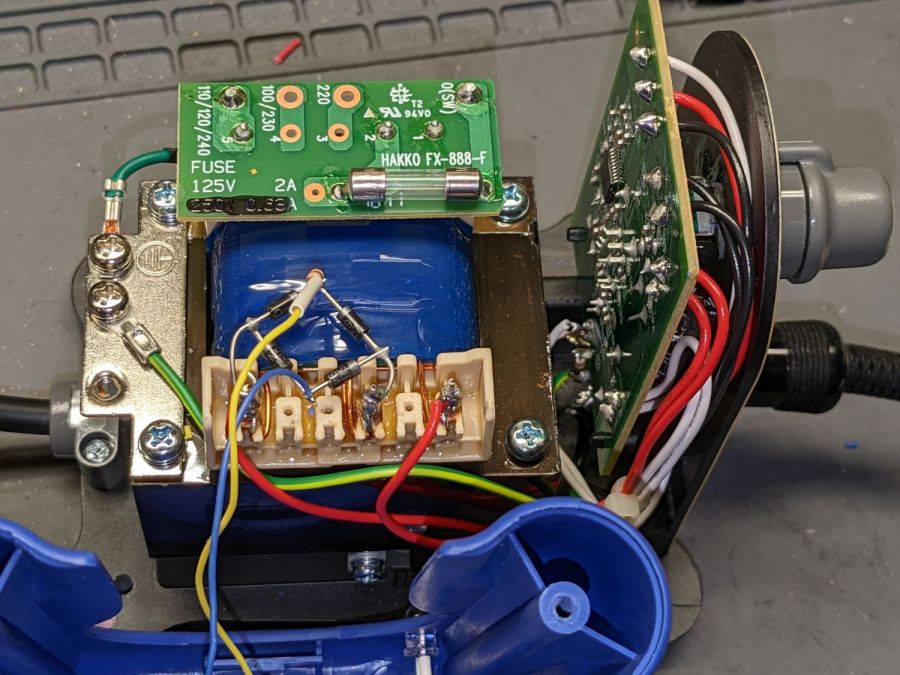
Some concerted rummaging failed to turn up the stash of bridge rectifiers, so I air-wired one from a quartet of discrete diodes:
Hakko 888 Soldering Iron pilot – bridge rectifier
Remember: the bigger the blob, the better the job.
For the record, the transformer produces 28 VAC, with the center tap 26 VAC from the left end and 2 VAC from the right end.
A 10 kΩ resistor stands upright at the far corner of the bridge, limiting the LED current to a few milliamps and making it bright enough for the purpose.
The front of the case has plenty of vacant space in its upper corners, so I drilled a hole and poked a blue LED:
Hakko 888 Soldering Iron pilot – heating
That’s shown with the iron heating.
Here’s an action shot with the temperature at the setpoint:
Hakko 888 Soldering Iron pilot – stable
Nowadays all soldering irons have digital readouts with no need for a pilot light.
Of course, two days later I found the bridge rectifier stash, but there’s no point in opening the patient again.