Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Eks gave the traverse crank a few twirls, told me the gear was engaging the rack entirely too tightly, and recommended shimming the apron:
LMS mini-lathe – apron shim
Of course, he was right.
Took two 18 mil shims to make it feel right, for whatever that’s worth.
That isn’t the prettiest solution, but it’ll suffice until the ways wear a bit more, things settle in, and I can cut a proper shim to surround the bolt holes across the entire bearing surface.
You can just make out the transparent plastic sheet that serves as a chip shield around the traverse gear shaft; kudos to LMS for that upgrade.
A chip shield tube / roof over the leadscrew is in order, too.
The never-sufficiently-to-be-damned O-rings in the kitchen’s American Standard faucet wore out again; the faucet spout went from a tolerable piddle to a major flow over the course of a few weeks.
The inner circumference of the bottom O-ring had most of the wear:
American Standard faucet – worn lower o-ring
In cross-section, it’s more of a D-ring:
American Standard faucet – worn lower o-ring – section
Once again, I soaked the spout & pillar in vinegar to remove the mineral deposits (despite the soft water), gave them a light sanding with 800 grit paper to regularize the surfaces, cleaned everything up, lubed it with petroleum jelly, and it’s all good.
Disassembly and replacement went smoothly, mostly because I could look up what I did before and avoid all the usual mistakes.
While mulling over the DRO situation, I clamped the compound rest to the cross slide, backed the knob to the limit of the backlash, and poked feeler gauges into the opening:
LMS mini-lathe – measuring compound backlash
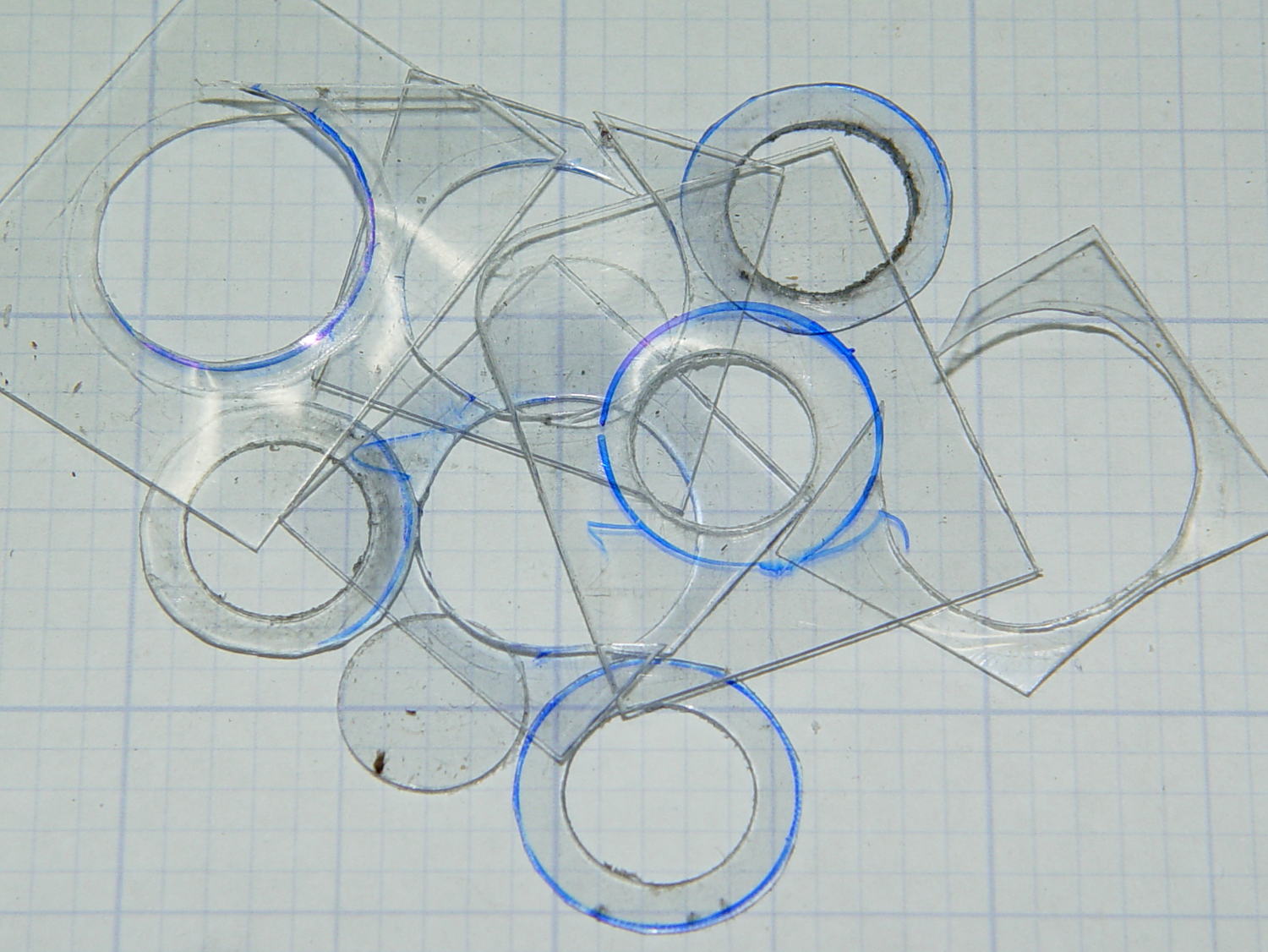
The backlash turned out to be around 20 mil = 0.020 inch = 0.5 mm, which seemed excessive to me, so I fiddled around with the contents of the Big Box o’ Polypropylene Sheets (harvested from various clamshell retail packages), deployed the hollow punches, performed some deft scissors work, and made some shims:
LMS mini-lathe – compound knob shims
Eventually, one of ’em offered a Good Enough combination of reduced backlash and E-Z turning to suffice for now. The proper solution involves facing off / rebuilding the fat metal washer on the right to put the bore at right angles to the bearing surfaces, but that’s another project.
The final backlash ended up around 4 mils, with a bit of drag due to the slightly irregular metal washer on the left preventing anything tighter. The cross slide knob also has a bit of backlash, but the thinnest sheets are a bit too thick.
Polypropylene isn’t the right plastic for a bearing, but it’s cheap, readily available, easily worked, and served as a bring-along project at Squidwrench…
We often see Red Tailed Hawks circling high above the area, but this one came closer than most (clicky for more dots):
Red Tailed Hawk Red Oaks Mill 2016-06-27 – 0195
Surely you can see it, just to the left of the speed limit sign? It took us by surprise, too!
Near the middle of the road:
Red Tailed Hawk Red Oaks Mill 2016-06-27 – 0211
And away:
Red Tailed Hawk Red Oaks Mill 2016-06-27 – 0227
Perhaps it’s taking a break to enjoy just flying around? That’s about what we were doing; it was a fine morning for that sort of thing.
Squinting at a few more frames, it’s flying at 18 mph with 4 wingbeats per second. Not in a hurry, that’s for sure, and still traveling faster than we were.
We spotted a few Gas Hawks above the airport, too, but they stayed too far away for pictures…
“Our” pair of Cooper’s Hawks (or their descendants, of which there have been many) hatched a pair of chicks that recently fledged and have been exploring their world:
New Hawks – standing tall
Sometimes they perch together:
New Hawks – companions
Their world contains many interesting things, not all of which are visible to the human eye:
New Hawks – curiosity
I’ve spotted a parent hawk circling high overhead while the youngsters practice their flight skills near the treetops. If you listen carefully, you can hear a hawk calling from far above:
New Hawks – parent overhead
We’ve seen them hopping from branch to branch, testing their wings, and by now they can launch from a standing start:
New Hawks – liftoff
New squirrels emerge at about the same time, with equivalent levels of experience:
New Hawks – curious squirrel
Right out of the nest, new hawks know what to do, if not quite how to accomplish it:
New Hawks – vs New Squirrel
That little squirrel instantly pasted itself to the bottom of the branch and escaped. This time, anyway.
Mary watched one hawk practicing its pouncing skills by attacking a pine cone. A talon wedged under a tight pine cone scale, to the extent that the hawk spent the next half hour flopping around the yard trying to part company with its personal Pine Tar Baby.
Perhaps the piles of Chipmunk Gibbage came from a new hawk practicing its regurgitation skills …
Go, new hawks, go!
Taken with the Sony DSC-H5, sometimes with the 1.7x teleadapter, under ambient light, hand-held, sometimes braced against the frame of a partially open door.
The Little Machine Shop 5200 lathe package includes DROs on the cross slide and compound cranks. The readouts report the position of the crank, not the slide position, which isn’t a major problem on a lathe.
Unfortunately, the compound collides with the DRO on the cross slide:
LMS Mini-lathe – compound vs DRO
That is a major problem on a lathe.
When you can’t turn the cross slide more than 45° from parallel with the bed, you cannot set the compound to the (typical) 29° degrees required for (traditional) thread cutting. That’s measured perpendicular to the bed, so it would be 61° on the compound rest scale, if the scale went that high:
LMS Mini-lathe – compound way
This mess doesn’t have a trivial fix, because the DRO body under the (non-removable) display doesn’t quite clear the compound screw:
LMS Mini-lathe – compound vs DRO – bottom
As nearly as I can tell, removing the entire DRO is the only way to slew the compound beyond 45°, but the DRO replaced the usual manual scale around the cross slide knob, so there’s no analog backup.
The DRO mounts to the cross slide with three screws, so you can’t rotate it 90° to the side to get better clearance:
LMS mini-lathe – DRO mounting screws
The other four screws presumably mount the DRO encoder housing to the outer shell.
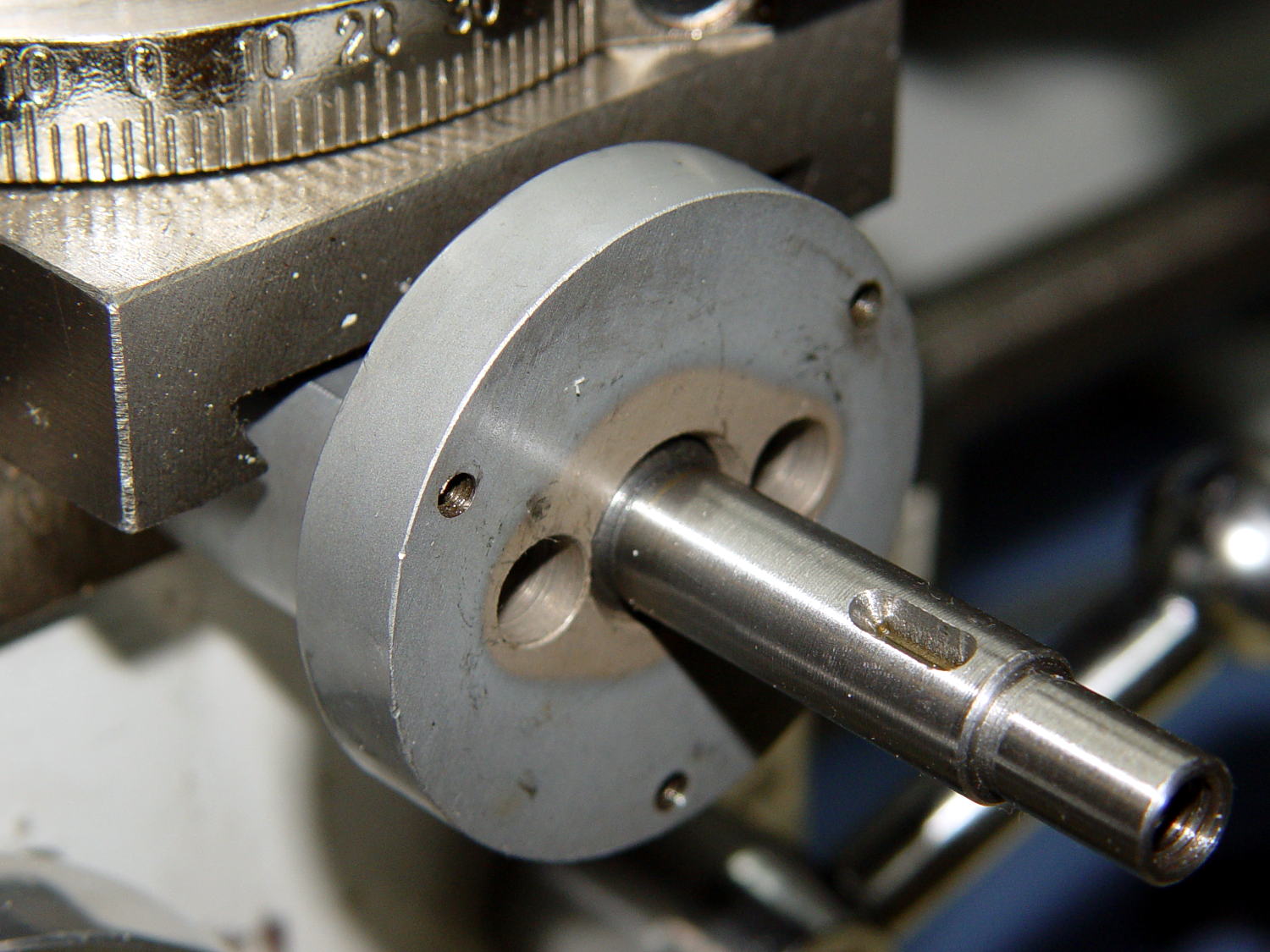
The setscrew sticking up from the sleeve anchors it to the cross slide shaft. The slit milled into the shaft captures the end of the setscrew:
LMS mini-lathe – cross slide leadscrew shaft
The knob slides over the shaft, with a screw in the end holding it in place by friction against a split lockwasher; you can apply enough torque to turn the knob under the lockwasher in either direction.
Removing the DRO doesn’t produce more cross slide travel, because the DRO body sits flush with the back side of that large disk.
I think the cross slide knob collides with the compound DRO, but I put it all back together without any further exploration.
Actual 6 inch DROs based on linear encoders seem to run $40-ish and other folks have fitted them to their mini-lathes. Verily, I don’t do much threadcutting, so I’ll just put this mess on the far back burner.
That DRO ticks me off every time I look at it, though…