For reasons lost in the mists of time, the DB-25 pinout used in the Sherline CNC Driver Box is kinda-sorta the same as everybody else’s DB-25 pinout, with minor difference of swapping the Step and Direction pins on each axis. This made no difference with the LinuxCNC parallel port driver, because (nearly) all pins are alike to it, but having recently found the Mesa 5i25 Everything I/O card and being desirous of upgrading to the latest & Greatest LinuxCNC, I figured why not throw all the balls in the air at once?
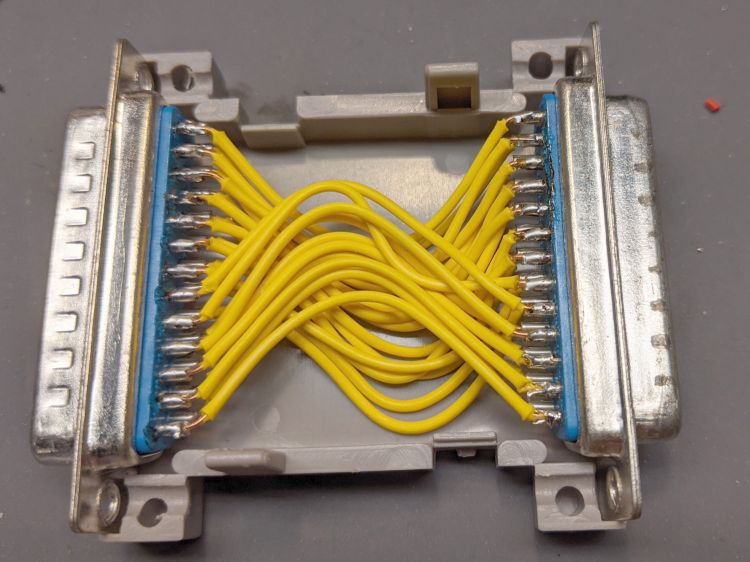
Although it’s theoretically possible to recompile the FPGA source code to swap the pins, the least horrible alternative was converting a null modem (remember null modems?) into a passthrough pinswapper:
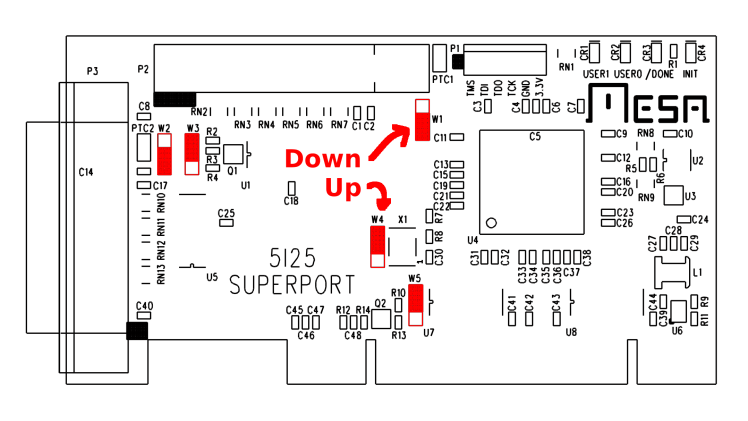
Make sure you put jumper W2 in the DOWN position to route pins 22-25 to DC ground, rather than +5 V. W1 does the same for the internal header, herein unused, but it’s in the same position just for neatness.
Similarly, put both W3 and W4 in their UP position to enable +5 V tolerance, connect the pullups to +5 V, and enable the pullups, thereby keeping the Sherline logic happy.
Jumper W5 must be UP in order to have the thing work.
The relevant diagram:
Flashing the 5i25 with the Probotix PBX-RF firmware produced the best fit to a simple parallel port:
sudo mesaflash --verbose --device 5i25 --write 5i25/configs/hostmot2/5i25_prob_rfx2.bit
sudo mesaflash --verbose --device 5i25 --reload
The mesaflash utility and all the BIT files come from their 5i25.zip file with all the goodies.
The Gecko G540 pinout came in a close second and, should the Sherline box go toes-up, I’ll probably replace it with a G540 and (definitely) rewire the steppers from Sherline’s unipolar drive to bipolar drive mode.
The 5i25 pinout now looks like this:
halrun
halcmd: loadrt hostmot2
Note: Using POSIX realtime
hm2: loading Mesa HostMot2 driver version 0.15
halcmd: loadrt hm2_pci
hm2_pci: loading Mesa AnyIO HostMot2 driver version 0.7
hm2_pci: discovered 5i25 at 0000:04:02.0
hm2/hm2_5i25.0: Low Level init 0.15
hm2/hm2_5i25.0: 34 I/O Pins used:
hm2/hm2_5i25.0: IO Pin 000 (P3-01): IOPort
hm2/hm2_5i25.0: IO Pin 001 (P3-14): PWMGen #0, pin Out0 (PWM or Up) (Output)
hm2/hm2_5i25.0: IO Pin 002 (P3-02): StepGen #0, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 003 (P3-15): IOPort
hm2/hm2_5i25.0: IO Pin 004 (P3-03): StepGen #0, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 005 (P3-16): PWMGen #0, pin Out1 (Dir or Down) (Output)
hm2/hm2_5i25.0: IO Pin 006 (P3-04): StepGen #1, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 007 (P3-17): IOPort
hm2/hm2_5i25.0: IO Pin 008 (P3-05): StepGen #1, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 009 (P3-06): StepGen #2, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 010 (P3-07): StepGen #2, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 011 (P3-08): StepGen #3, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 012 (P3-09): StepGen #3, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 013 (P3-10): IOPort
hm2/hm2_5i25.0: IO Pin 014 (P3-11): Encoder #0, pin A (Input)
hm2/hm2_5i25.0: IO Pin 015 (P3-12): Encoder #0, pin B (Input)
hm2/hm2_5i25.0: IO Pin 016 (P3-13): Encoder #0, pin Index (Input)
hm2/hm2_5i25.0: IO Pin 017 (P2-01): IOPort
hm2/hm2_5i25.0: IO Pin 018 (P2-14): PWMGen #1, pin Out0 (PWM or Up) (Output)
hm2/hm2_5i25.0: IO Pin 019 (P2-02): StepGen #4, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 020 (P2-15): IOPort
hm2/hm2_5i25.0: IO Pin 021 (P2-03): StepGen #4, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 022 (P2-16): PWMGen #1, pin Out1 (Dir or Down) (Output)
hm2/hm2_5i25.0: IO Pin 023 (P2-04): StepGen #5, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 024 (P2-17): IOPort
hm2/hm2_5i25.0: IO Pin 025 (P2-05): StepGen #5, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 026 (P2-06): StepGen #6, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 027 (P2-07): StepGen #6, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 028 (P2-08): StepGen #7, pin Step (Output)
hm2/hm2_5i25.0: IO Pin 029 (P2-09): StepGen #7, pin Direction (Output)
hm2/hm2_5i25.0: IO Pin 030 (P2-10): IOPort
hm2/hm2_5i25.0: IO Pin 031 (P2-11): Encoder #1, pin A (Input)
hm2/hm2_5i25.0: IO Pin 032 (P2-12): Encoder #1, pin B (Input)
hm2/hm2_5i25.0: IO Pin 033 (P2-13): Encoder #1, pin Index (Input)
hm2/hm2_5i25.0: registered
hm2_5i25.0: initialized AnyIO board at 0000:04:02.0P3 is the DB-25 on the back panel and P2 is the internal IDC header.

Comments
2 responses to “Mesa 5i25 Superport: Reflash and Step-Direction Pin Swap”
[…] Sherline CNC driver requires an adapter to swap the Step and Direction signals on the output […]
[…] Even shorter values for the Direction signal worked with the initial pncconf setup for the Mesa 5I25 FPGA card: […]