Homing the MPCNC’s Z axis at the bottom end of its travel made no sense, but the Z stage lacks a convenient spot to mount / trigger a switch at the top of its travel, so this sufficed for initial tests & fiddling:

The EMT rail carrying the switch moves downward, tripping the lever when it hits the MPCNC’s central assembly.
Somewhat to my surprise, a TRCT5000-based optical proximity sensor (harvested from the Kenmore 158 Crash Test Dummy’s corpse) and a strip of black electrical tape work perfectly:
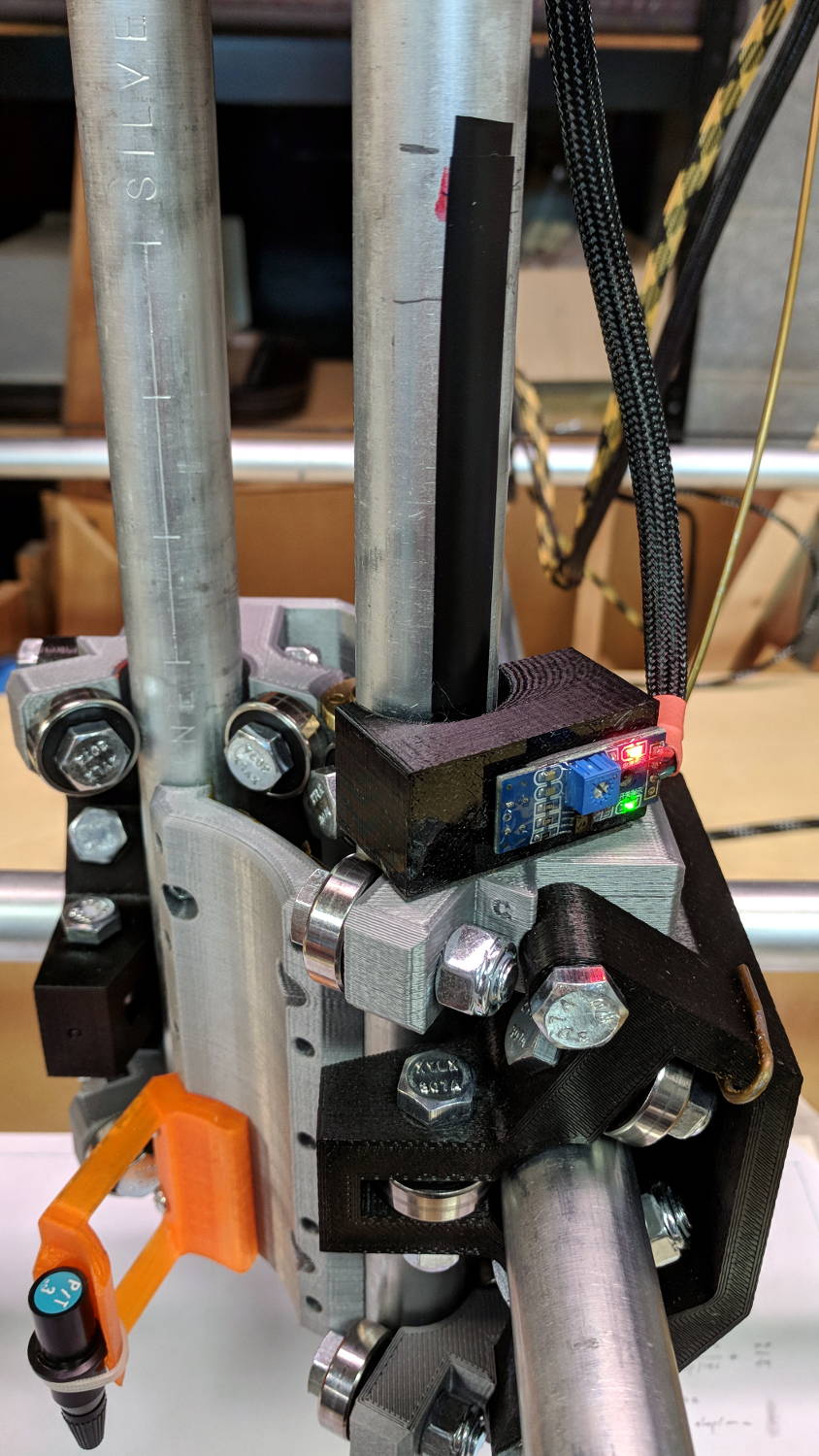
The PCB wears a shiny new epoxy coat:

I soldered the wires (harvested from the previous endstop) directly to the PCB, because the pinout isn’t the same and fewer connectors should be better.
The mount uses black PETG, rather than translucent orange, in hope of IR opacity, and wraps around the EMT rail at (roughly) the 2 mm standoff producing the peak response:
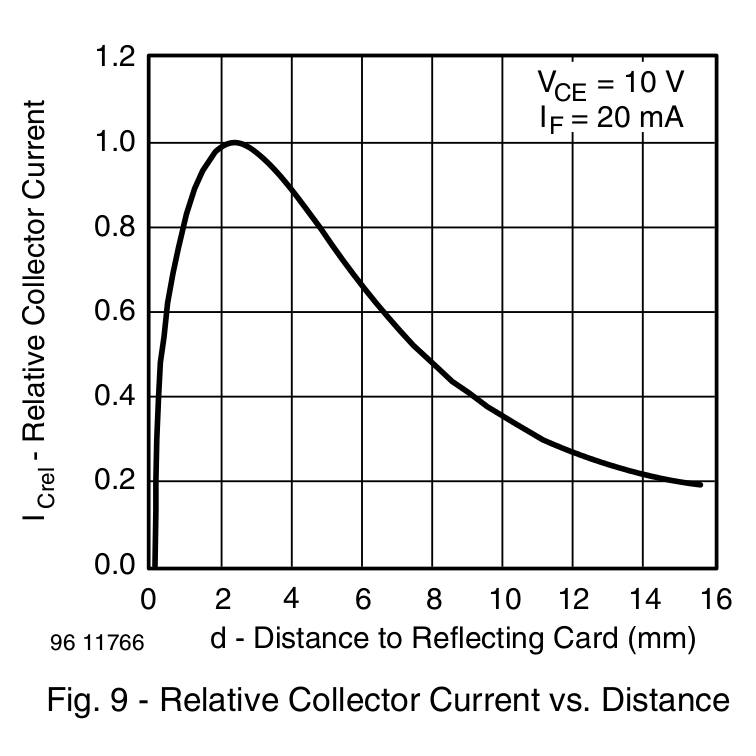
In truth, I set the gap by eyeballometric guesstimation to make the entire mount arc sit equidistant from the EMT:
The mount includes the 2 mm spacing around the EMT OD and puts the sensor tip flush with the arc OD, so it should be pretty close:

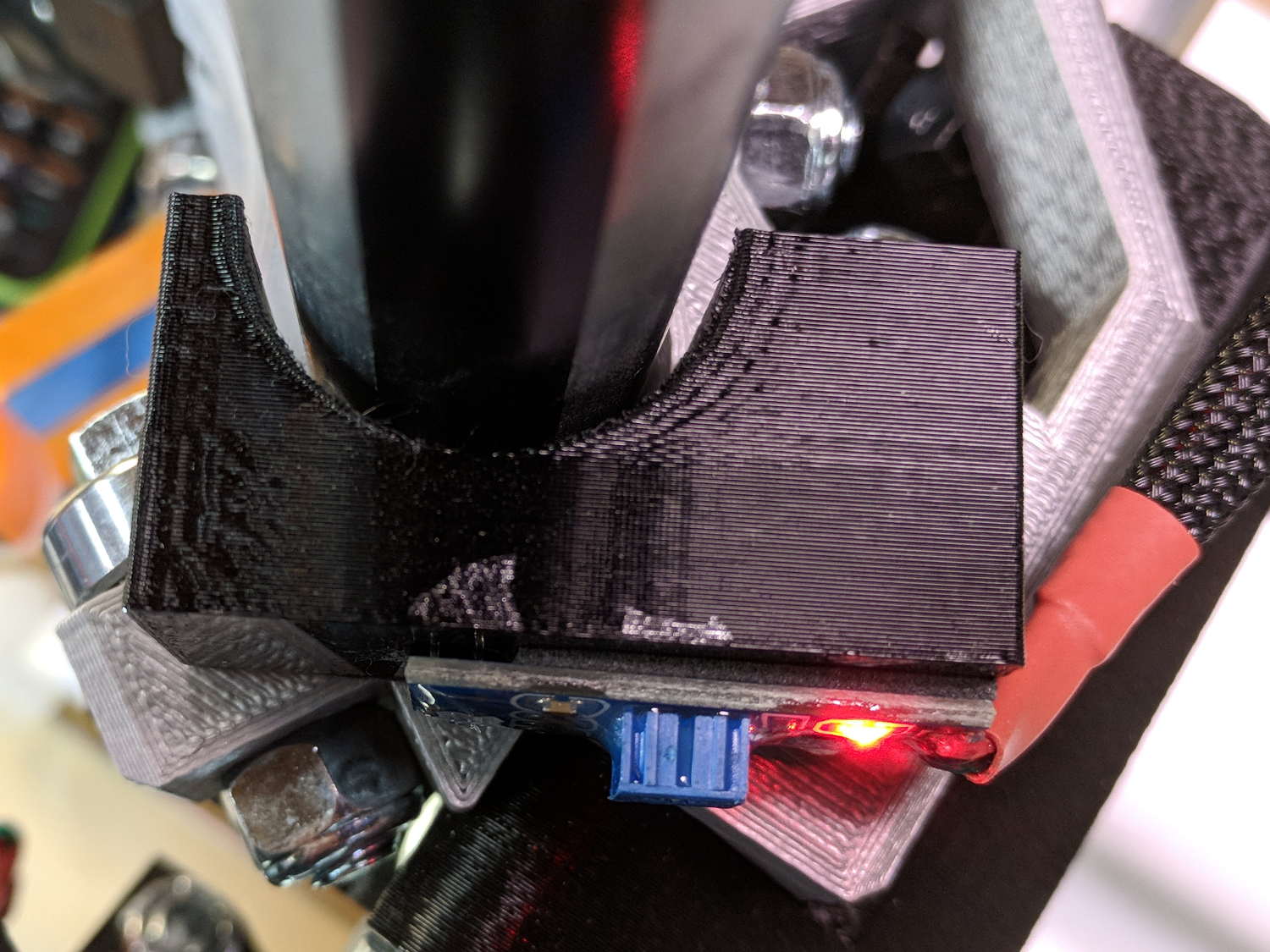
A strip of 3M permanent tape, cut to clear the 608 bearings, affixes the mount to the MPCNC’s central assembly. The solid model now includes a midline reference notch, with a height rounded up to the next-highest multiple of 2.0 mm. It needs a loop to anchor the cable.
The blue twiddlepot sets the comparator threshold midway between the response over black tape (incorrectly on = too low) and bare EMT (incorrectly off = too high), in the hope of noise immunity. The range spanned nearly half of the pot rotation, so I think it’s all good.
The sensor doesn’t trip when the edge of the tape exactly meets its midline, which meant I had to trim a strip of tape to suit. As part of setting the twiddlepot, I shut off the Z axis motor and laid some test strips on the EMT:
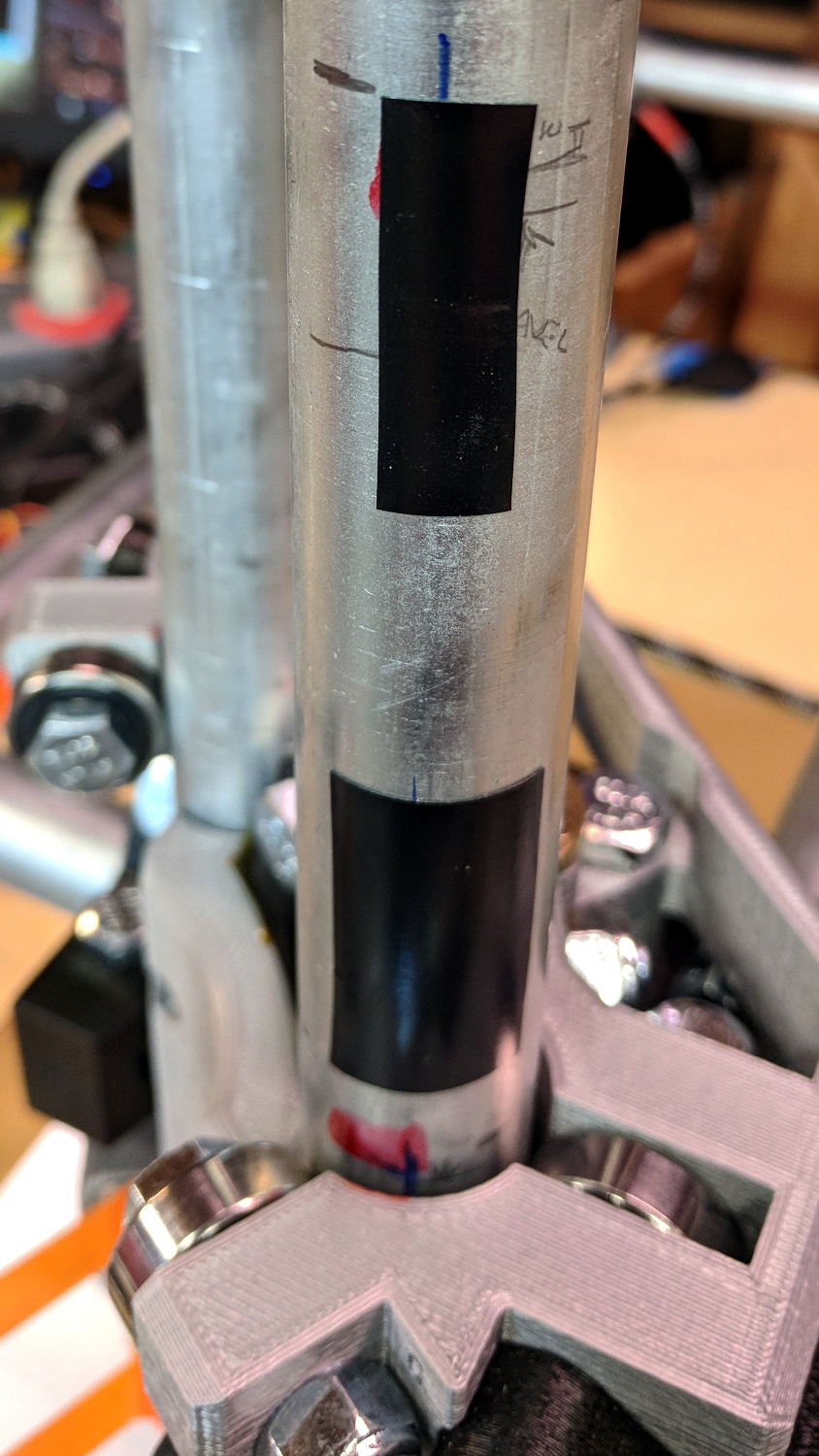
I spun the leadscrew with one hand, held the sensor with the other, twiddled the trimpot, trimmed the upper and lower ends of the tape, and generally had a fine time. The sensor responds equally well to a half-wide strip of tape (in the upper picture), with the distinct advantage of not encroaching on the 608 bearing tracks.
The GRBL setup now homes Y and Z toward the positive end of their travel, with X still toward the negative end while a set of extension cables remains in transit around the planet.
The OpenSCAD source code as a GitHub Gist:
| // TCRT5000 Z Axis Endstop Mount | |
| // Ed Nisley KE4ZNU – 2017-12-04 | |
| /* [Build Options] */ | |
| Layout = "Show"; // [Build, Show, Block] | |
| Section = true; // show internal details | |
| /* [Extrusion] */ | |
| ThreadThick = 0.25; // [0.20, 0.25] | |
| ThreadWidth = 0.40; // [0.40] | |
| function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit); | |
| /* [Hidden] */ | |
| Protrusion = 0.01; // [0.01, 0.1] | |
| HoleWindage = 0.2; | |
| ID = 0; | |
| OD = 1; | |
| LENGTH = 2; | |
| /* [Sizes] */ | |
| RailOD = 23.5; // actual rail OD | |
| OptoPCB = [32.5,14.2,1.6]; // prox sensor PCB | |
| ComponentHeight = 5.0; // max component height above PCB | |
| OptoSensor = [5.8,10.2,10.5]; // sensor head below PCB | |
| OptoOffset = 3.0; // sensor head center from PCB edge | |
| OptoRange = 2.0; // sensor to rail distance | |
| TapeThick = 1.0; // foam mounting tape | |
| WallThick = 4.0; // basic wall thickness | |
| Block = [WallThick + OptoRange + RailOD/2 + (OptoPCB[0] – OptoOffset), | |
| RailOD/2 + OptoRange + OptoSensor[2] – TapeThick, | |
| IntegerMultiple(OptoPCB[1] + 2*WallThick,2.0)]; // basic block shape | |
| echo(str("Block: ",Block)); | |
| NumSides = 6*4; | |
| //- Adjust hole diameter to make the size come out right | |
| module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes | |
| Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2); | |
| FixDia = Dia / cos(180/Sides); | |
| cylinder(r=(FixDia + HoleWindage)/2,h=Height,$fn=Sides); | |
| } | |
| //- Shapes | |
| // Main block constructed with PCB along X, opto sensor at Y=0 | |
| module PCBBlock() { | |
| difference() { | |
| translate([-(WallThick + OptoRange + RailOD/2), | |
| (-Block[1] + RailOD/2 + OptoRange), | |
| -Block[2]/2]) | |
| cube(Block,center=false); | |
| for (i=[-(RailOD/2 + OptoRange + WallThick), | |
| (OptoPCB[0] – OptoOffset)]) | |
| translate([i,0,0]) | |
| rotate([90,0,0]) rotate(45) | |
| cube([2*ThreadWidth,2*ThreadWidth,2*Block[2]],center=true); | |
| translate([0,(RailOD/2 + OptoRange),0]) | |
| cylinder(d=(RailOD + 2*OptoRange), | |
| h=(Block[2] + 2*Protrusion), | |
| $fn=NumSides,center=true); | |
| rotate([90,0,0]) | |
| cube(OptoSensor + [0,0,Block[1]],center=true); | |
| } | |
| } | |
| //- Build things | |
| if (Layout == "Block") | |
| PCBBlock(); | |
| if (Layout == "Show") { | |
| translate([0,-(RailOD/2 + OptoRange),0]) | |
| PCBBlock(); | |
| color("Yellow",0.5) | |
| cylinder(d=RailOD,h=2*Block[2],$fn=NumSides,center=true); | |
| } | |
| if (Layout == "Build") | |
| translate([0,0,OptoSensor[2] – TapeThick]) | |
| rotate([90,0,0]) | |
| PCBBlock(); |
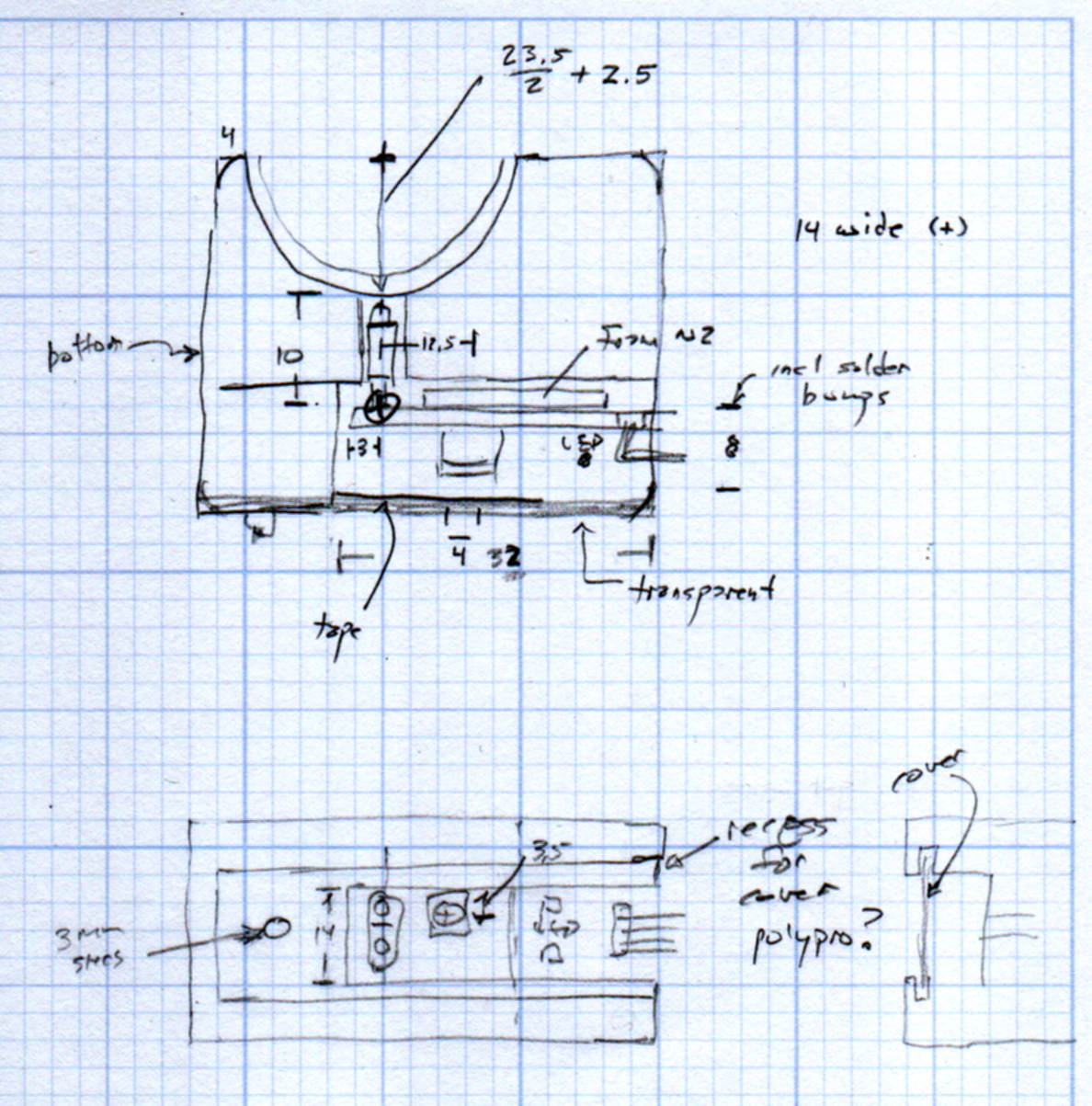
The original doodles, including a bunch of ideas left on the cutting room floor:

Comments
3 responses to “MPCNC: Z Axis Upward Homing with Opto Proximity Sensor”
[…] work well enough. The dark tinge near the bottom comes from the black filament I used for the MPCNC’s Z Axis sensor and won’t affect its operation in the […]
[…] Having a tool length probe station on the Sherline, I had to build one for the MPCNC: […]
[…] I’d been using for B-size plots doesn’t cover the full area, but I’d set the Z axis limit switch to trip just before the bottom of the rails whacked into the glass. Extending the travel by 5 mm […]