Prompted by that comment, a bit more data emerges.
This unsteady ziggurat barely supports the aluminum CPU heatsink atop a PC CPU exhaust duct; the two came from different PCs and have no relation to each other. The vise in the background keeps the whole affair from falling over. The fan sucks air through the heatsink and exhausts it out the front.
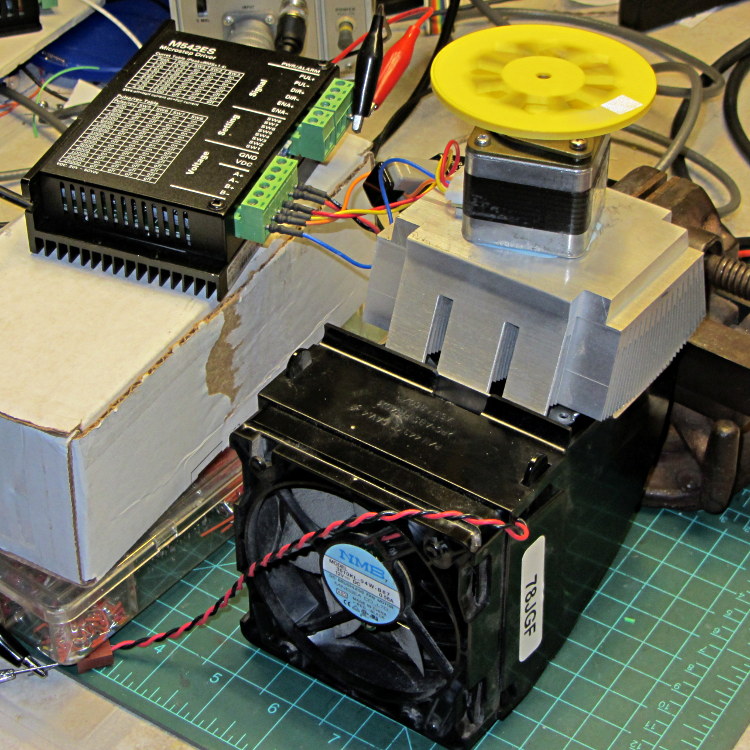
Throughout all this, the stepper driver runs at a bit over 10 k step/sec, tuned to avoid the howling mechanical resonances in that stack. At 1/8 microstepping, that’s 6.25 rev/s = 375 RPM, which would drive the Thing-O-Matic at 210 mm/s and the M2 at 225 mm/s. Your speed will vary, of course, depending on the pulley diameter / number of teeth / belt pitch, etc.
Under the same conditions as before (i.e., no thermal compound, fan off), the stepper stabilized at 143 °F = 62 °C in the 57 °F = 14 °C Basement Laboratory ambient, with 1.91 A peak current (I don’t believe that second decimal place, either) and a 6.6 °C/W case-to-ambient coefficient. That’s close enough to the 63 °C and 6.7 °C/W coefficient from the earlier test, so the conditions seem roughly the same.
Smoothing a thin layer of heatsink compound on the butt of the motor, then squishing it firmly atop the heatsink, cut the temperature to 130 °F = 53 °C without the fan. That suggests the case-to-ambient coefficient is now 5.3 °C/W: the thermal compound helps by 1.3 °C/W.
Turning on the fan drops the case temperature to 84 °F = 29 °C, which works out to a coefficient of 2.1 °C/W. Obviously, moving air over that heatsink helps the cooling a lot: the heatsink felt cold to the touch and the motor case was barely warm.
Increasing the current to 2.37 A dissipates 11.2 W, which would be scary without the heatsink and air flow. The temperature stabilized at 91 °F = 33 °C, for a coefficient of 1.7 °C/W.
At 2.83 A = 16 W, the temperature rises to 100 °F = 38 °C, with a coefficient of 1.5 °C/W. While it’s not unstoppable with that much current, the motor has plenty of torque! The motor becomes pleasantly warm, the heatsink stays just above cool, and all seems right with the world. I suspect the windings get a bit toasty in there, but they can’t possibly be worse off than inside a case at boiling-water temperatures.
Using the original insulated-motor coefficient of 19 °C/W, 16 W would cook the motor at 320 °C. Perhaps the case would make a nice extruder heater after it stopped being a motor?
[Update: See the comments for the results of just blowing air over the motor case.]

Comments
8 responses to “Stepper Motor Thermal Coefficient vs. Thermal Compound and Forced Air”
Very nice! Love the data.
And yet still . . what I was wondering about was the fan + motor, without a heatsink at all. Simply directing the airflow of the fan broadside at the motor housing :)
OK, you win…
Two inches downstream of that flow straightener blowing at 3.1 m/s, the motor case temperature stabilizes at 76 °F = 24 °C with a 1.0 A peak winding current.
That says the fan drops the thermal coefficient from 19 °C/W to maybe 5 °C/W.
So it’s much better than still air, about as good as a big chunk of aluminum without grease! Of course, it’d be a lot easier to stick a fan on the motor, but … that’s at 1 A peak. Push 2.4 A through the windings to get Moah Powah and the temperature would hit 70 °C.
I think forced air cooling applied to a bare motor just isn’t good enough.
(It should go without saying that all my numbers depend a lot on the exact circumstances. I think the results have the right order of magnitude, but I don’t trust the first significant digit. Not to mention a quick edit to correct a typo and add the picture…)
You rock. Thanks for doing my homework :) For the mill I’m playing with, I have in mind to print a fan holder + shroud. If I do that. I’ll send you a pic.
What bothers me with the heat sink is that one end of the motor would be cooler than the others. Plus (with any cooling) what high temps are the windings experiencing? There is probably some temp that the magnets in the rotor stop being good magnets. I think the best bet would be to force air through the motor, but that is bound to be a can of worms.
Not by much, because the laminations are stacked and compressed firmly together, so they count as nearly solid metal. I think the thermal conductivity to anything outside the motor is low enough that the case will be isothermal by comparison.
The winding bobbins are plastic, of course, but I’m pretty sure that keeping the case warm, rather than hot, also holds the windings at a reasonable temperature. Remember that the ratings allow (some) steppers to run at 80 °C over ambient, so they’re designed to operate hot. It’s just in the realm of 3D printing, where motors run inside wood boxes, that relatively low winding current (and, thus, torque) produce such absurdly high temperatures that clever plastic doodads melt.
Doesn’t that make it not a significant digit, sort of by definition? :)
I wouldn’t go so far as to call it insignificant, but …
[…] Yes, that’s thermal compound peeking out from between the motor and the chassis. More about that later, but it derives from those measurements. […]
[…] general idea comes from my measurements of the air-cooled heatsink stuck to a stepper’s end cap. The metal-to-metal conductivity works surprisingly well and reduces the case temperature to […]