The M2’s Z axis will descend under its own weight with the stepper motor disabled, landing with an emphatic thud when the Nylock nuts holding the leadscrew nut in place hit the top of the motor case. I stuck a pair of rubber feet atop the motor to cushion the impact:
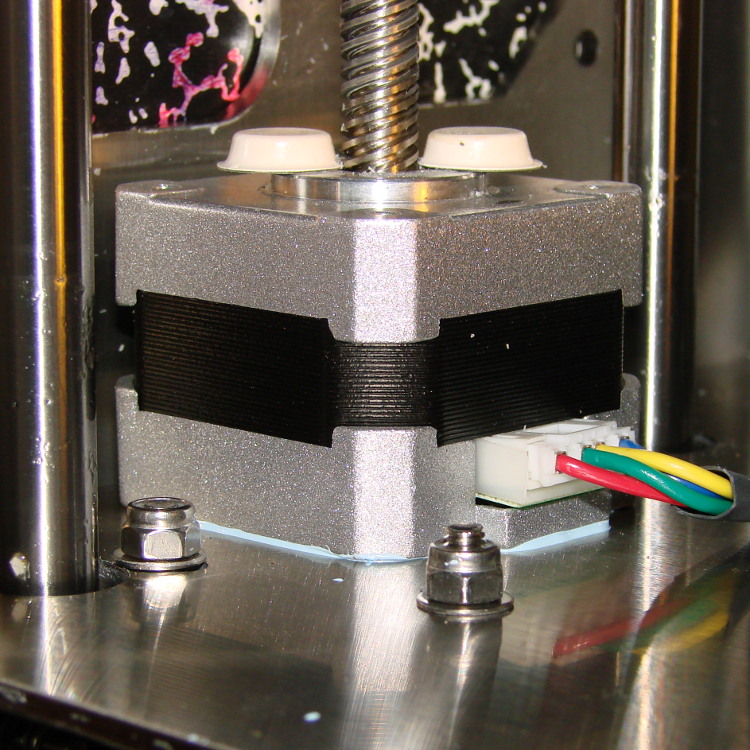
Yes, that’s thermal compound peeking out from between the motor and the chassis. More about that later, but it derives from those measurements.
The top end of the leadscrew passes through a ball bearing, but the bearing OD is about 15 mils smaller than the top plate recess ID. I slid a strip of 6 mil brass shimstock around the bearing to soak up the difference and reduce a nasty mechanical resonance:
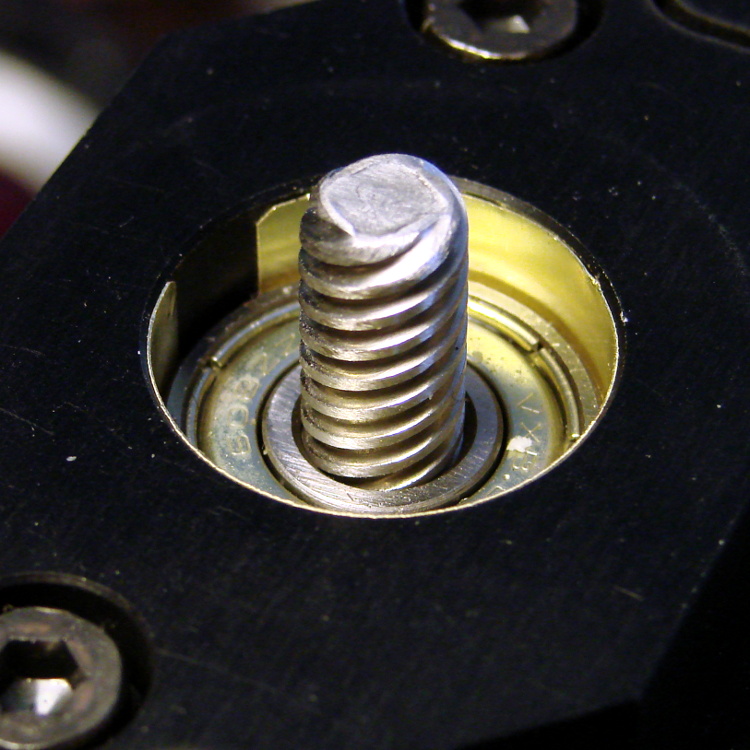
The leadscrew is also a loose fit in the bearing ID, which I’ll correct with a dab of low-strength threadlock when the time comes.
Note, however, that there’s no other mechanical compliance in the Z axis assembly, so a slightly misaligned leadscrew may actually need that slop when the stage approaches the top of its travel. That wasn’t the case in my printer, but don’t take it for granted; if the leadscrew doesn’t turn easily by hand, remove the shimstock.

Comments
4 responses to “Makergear M2: Z Axis Bumpers and Upper Bearing Bushing”
That Z column is interesting on two levels. First, the lead screw looks like it isn’t a standard screw thread, rather a multi helical thread with either two or four threads. Second, the lead screw is integral to the motor shaft. I wonder how they are doing this on their budget, I assume this is some repurposed linear actuator or similar. Interesting, very interesting.
It’s a four-start screw… I’ll have more details later, but it’s not long for this world!
[…] the stage requires no effort at all: it falls under its own weight, prompting me to install those bumpers. The design doesn’t have much compliance, but it’s well-adjusted and works […]
[…] I added the shim around the Z axis leadscrew bearing, the default homing speed excited a howling mechanical resonance. Increasing the homing speed moved […]