The Sony HDR-AS30V “action camera” uses NP-BX1 lithium batteries (3.7 V @ 1.24 A·h = 4.6 W·h) that are, of course, a completely different size and shape than any other lithium battery on the planet.
So.
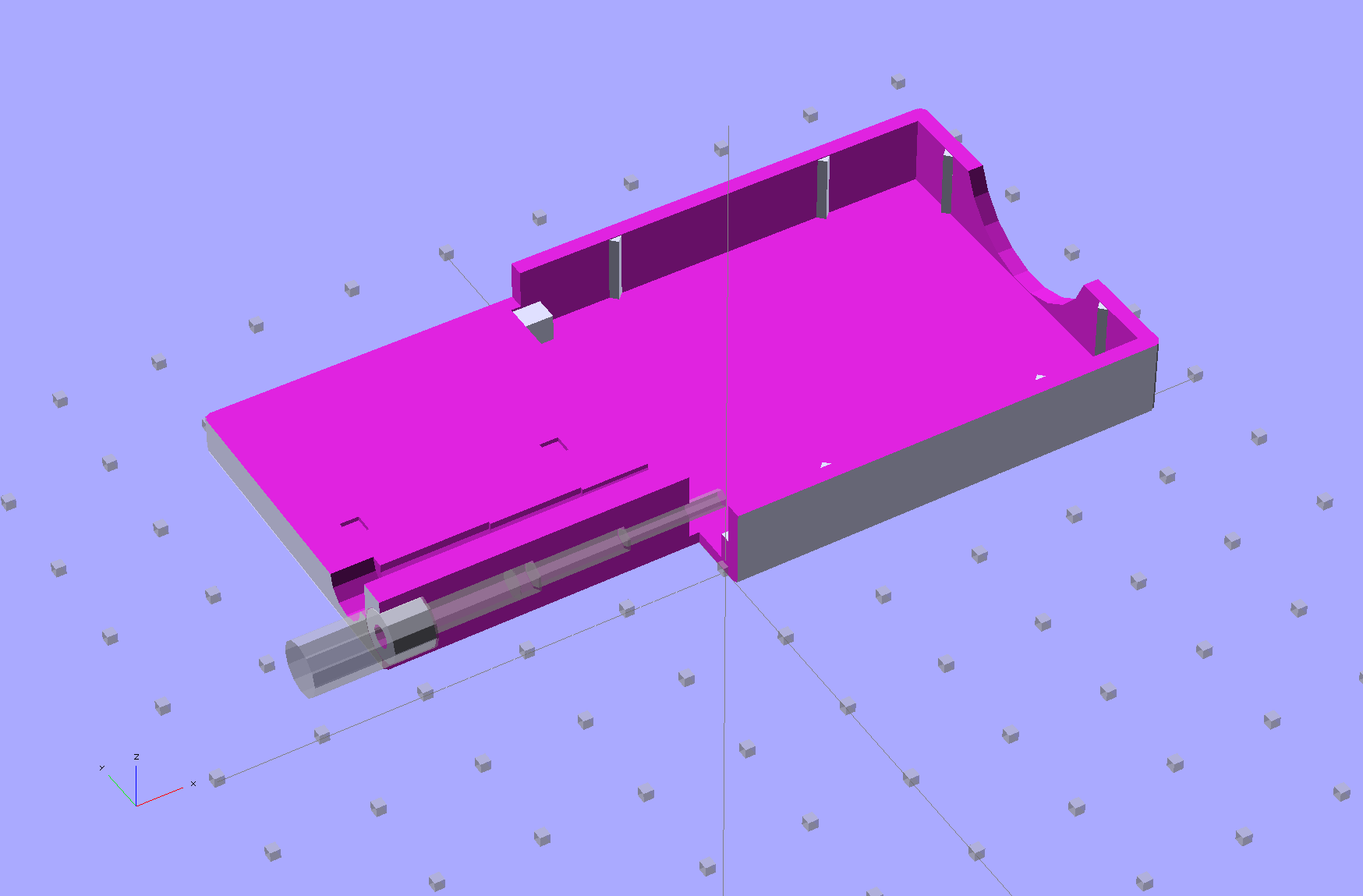
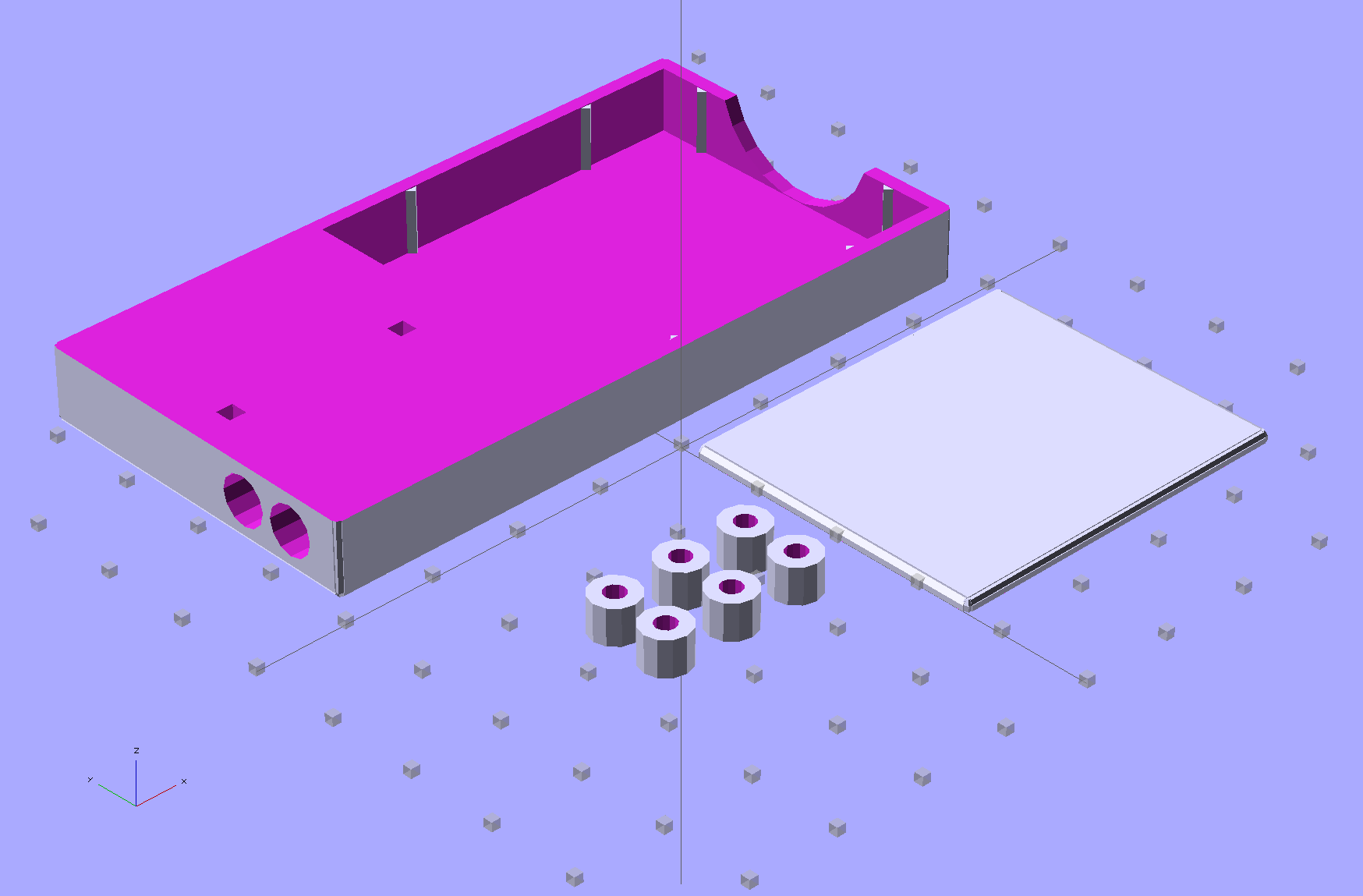
Tweaking a few dimensions in the Canon NB-6L source code, tinkering with the layout of the contact pins, and shazam Yet Another 3D Printed Battery Test Fixture:
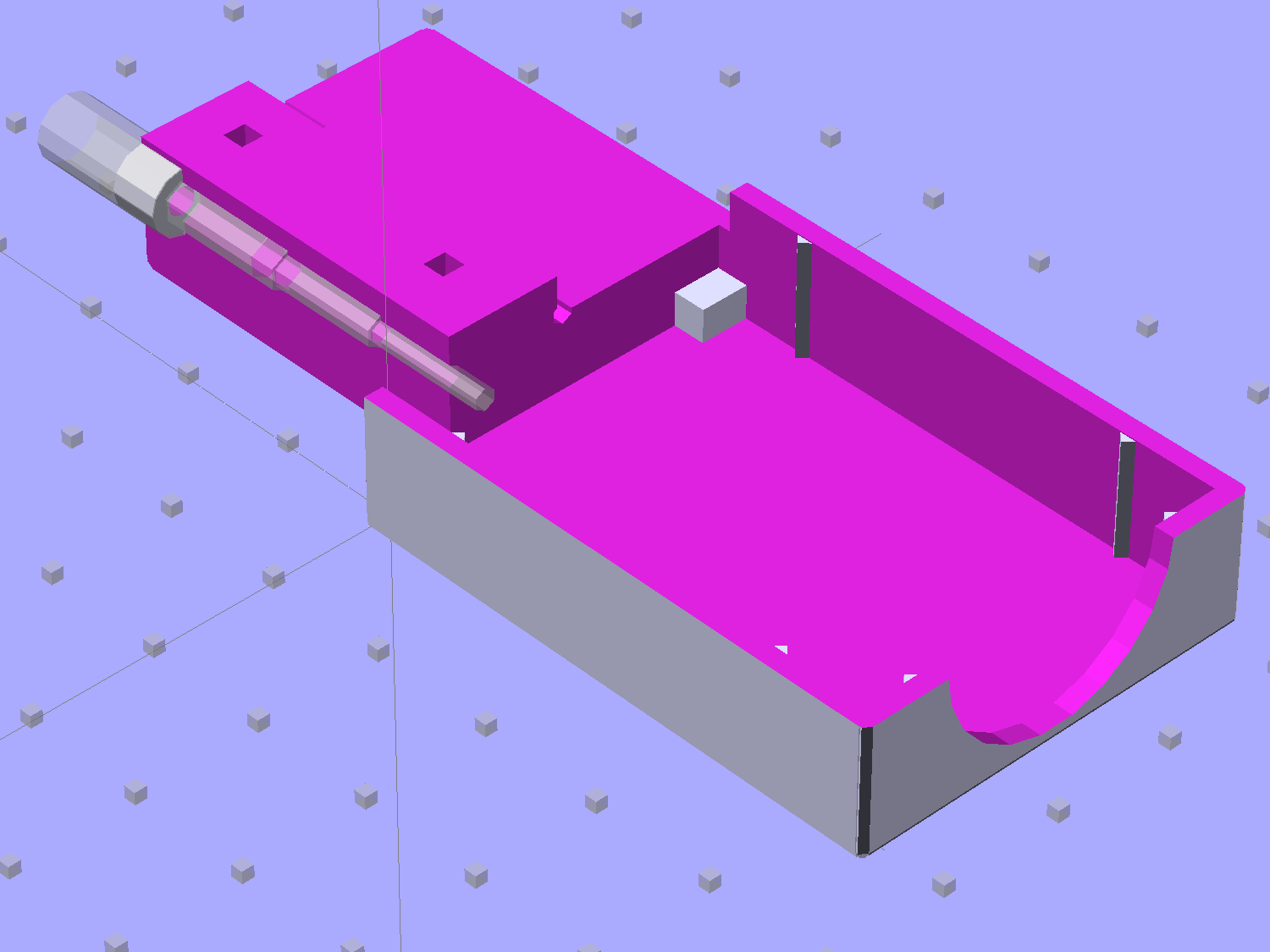
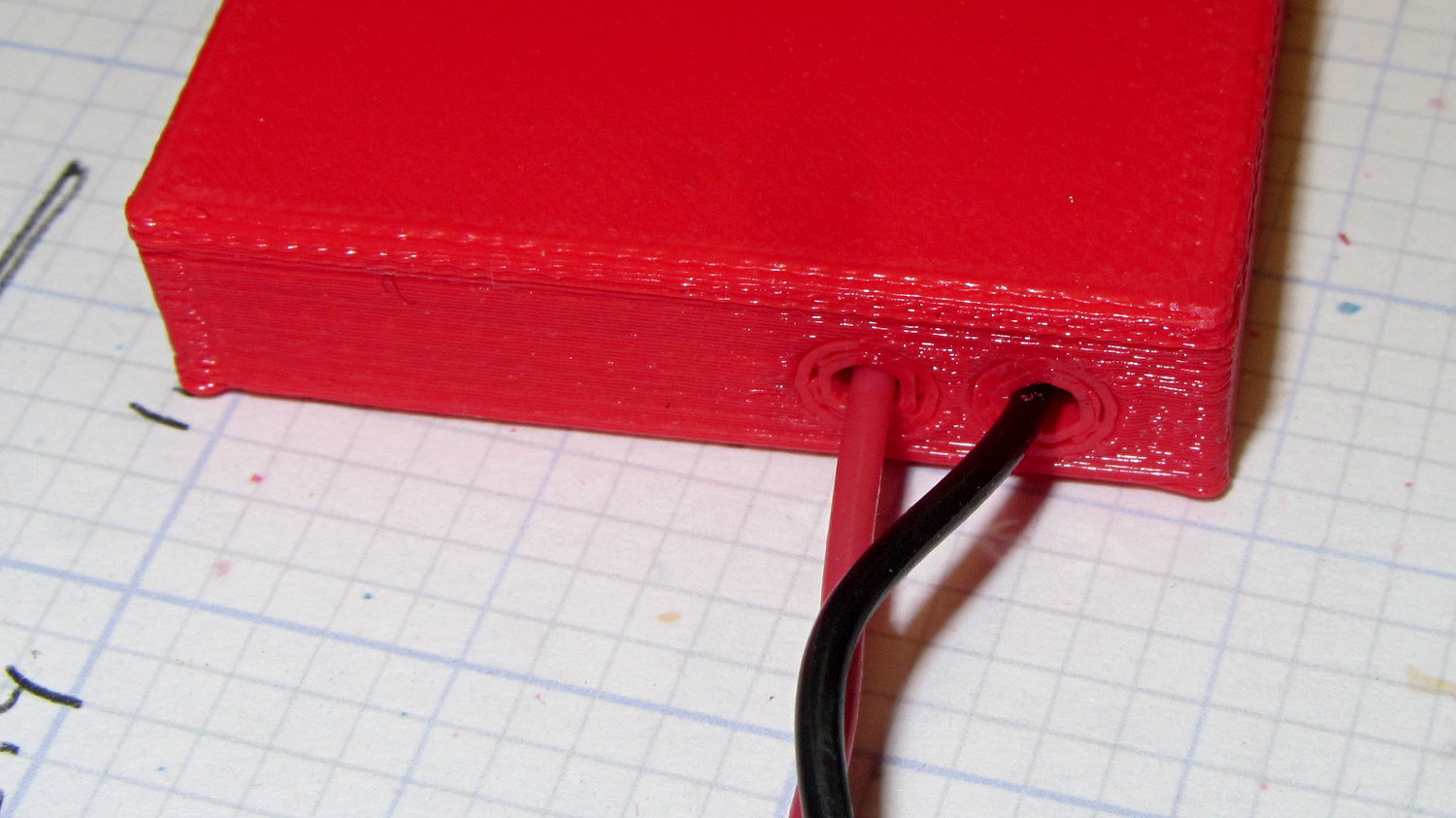
It builds nicely, although the contact pin tunnels are a bit too close to the top of the case:

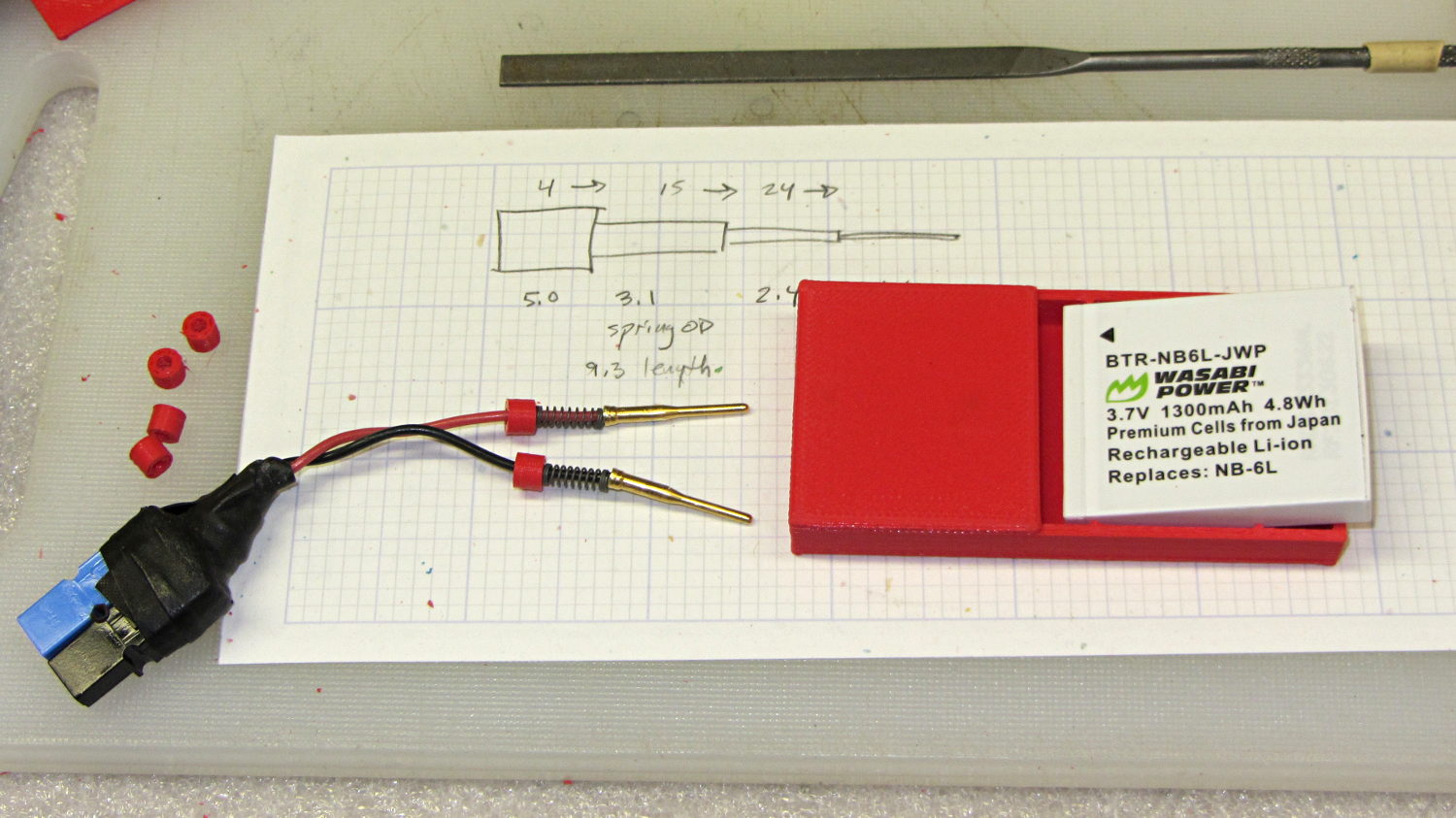
After reaming out the contact pin holes to the proper diameters & depths, then gluing the plugs in place, it works just as you’d expect:

It’s worth noting that the Wasabi charger accepts the batteries upside-down, with the conspicuous chevron against the charger body. It’s definitely not the way all the other chargers work. The keying recesses on the battery (corresponding to the blocks in the solid model) lie along the bottom edge of the contact surface, so flipping the battery over means they’ll hold it in place, but … oh, well.
That grotty Powerpole connector last saw use in some random benchtop lashup. At some point I’ll be forced to start making more of those.
The OpenSCAD source code:
// Holder for Sony NP-BX1 Li-Ion battery
// Ed Nisley KE4ZNU January 2013
include <MCAD/boxes.scad>
// Layout options
Layout = "Show"; // Show Build Fit Case Lid Pins Plugs AlignPins
//- Extrusion parameters - must match reality!
// Print with +2 shells and 3 solid layers
ThreadThick = 0.20;
ThreadWidth = 0.40;
HoleWindage = 0.2;
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
Protrusion = 0.1; // make holes end cleanly
inch = 25.4;
BuildOffset = 3.0; // clearance for build layout
Gap = 8.0; // separation for Fit parts
//- Battery dimensions - rationalized from several samples
// Coordinate origin at battery corner by contact plates on bottom surface
BatteryLength = 43.0;
BatteryWidth = 30.0;
BatteryThick = 9.5;
ContactWidth = 2.90;
ContactLength = 4.30;
ContactRecess = 0.90;
ContactOC = 10.0; // center-to-center across contact face
ContactOffset = 6.20; // offset from battery edge
ContactHeight = 6.30; // offset from battery bottom plane
AlignThick = 2.75; // alignment recesses on contact face
AlignDepth = 1.70; // into face
AlignWidth1 = 3.70; // across face at contacts
AlignWidth2 = 3.60; // ... other edge
//- Pin dimensions
PinTipDia = 1.6;
PinTipLength = 10.0;
PinTaperLength = 2.3;
PinShaftDia = 2.4;
PinShaftLength = 6.8;
PinFerruleDia = 3.1;
PinFerruleLength = 2.0;
PinLength = PinTipLength + PinTaperLength + PinShaftLength + PinFerruleLength;
ExtendRelax = 1.5 + ContactRecess; // pin extension when no battery is present
ExtendOvertravel = 1.0; // ... beyond engaged position
//- Spring dimensions
SpringDia = 3.1; // coil OD
SpringMax = 9.3;
SpringLength = SpringMax - 0.5; // slightly compressed
SpringMin = 4.5;
SpringPlugOD = IntegerMultiple(5.0,ThreadWidth); // plug retaining the spring
SpringPlugID = 2.0;
SpringPlugLength = IntegerMultiple(4.0,ThreadWidth);
SpringPlugSides = 3*4;
SpringTravel = ExtendRelax + ExtendOvertravel;
//- Holder dimensions
GuideRadius = ThreadWidth; // friction fit ridges
GuideOffset = 7; // from compartment corners
WallThick = 4*ThreadWidth; // holder sidewalls
BaseThick = 6*ThreadThick; // bottom of holder to bottom of battery
TopThick = 6*ThreadThick; // top of battery to top of holder
ThumbRadius = 10.0; // thumb opening at end of battery
CornerRadius = 3*ThreadThick; // nice corner rounding
CaseLength = SpringPlugLength + SpringLength + PinLength - ExtendRelax
+ BatteryLength + GuideRadius + WallThick;
CaseWidth = 2*WallThick + 2*GuideRadius + BatteryWidth;
CaseThick = BaseThick + BatteryThick + TopThick;
AlignPinOD = 1.75; // lid alignment pins - filament snippets
AlignPinLength = 5.0;
AlignPinInset = 7.0;
AlignPinOffset = -3.75; // from centerline - choose to miss contact pins
//- XY origin at front left battery corner, Z on platform below that
CaseLengthOffset = -(SpringPlugLength + SpringLength + PinLength - ExtendRelax);
CaseWidthOffset = -(WallThick + GuideRadius);
CaseThickOffset = BaseThick;
LidLength = ExtendRelax - CaseLengthOffset;
echo(str("Contact pin tip dia: ",PinTipDia));
echo(str("Drill depth to taper end: ",
(SpringPlugLength + SpringLength + PinFerruleLength + PinShaftLength + PinTaperLength),
" -- Dia: ",PinShaftDia));
echo(str(" to ferrule end: ",
(SpringPlugLength + SpringLength + PinFerruleLength),
" -- Dia: ",PinFerruleDia));
echo(str(" to plug end: ",SpringPlugLength,
" -- Dia: ",SpringPlugOD));
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
Range = floor(50 / Space);
for (x=[-Range:Range])
for (y=[-Range:Range])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//-------------------
//-- Guides for tighter friction fit
module Guides() {
translate([GuideOffset,-GuideRadius,CaseThickOffset])
PolyCyl(2*GuideRadius,(BatteryThick - Protrusion),4);
translate([GuideOffset,(BatteryWidth + GuideRadius),CaseThickOffset])
PolyCyl(2*GuideRadius,(BatteryThick - Protrusion),4);
translate([(BatteryLength - GuideOffset),-GuideRadius,CaseThickOffset])
PolyCyl(2*GuideRadius,(BatteryThick - Protrusion),4);
translate([(BatteryLength - GuideOffset),(BatteryWidth + GuideRadius),CaseThickOffset])
PolyCyl(2*GuideRadius,(BatteryThick - Protrusion),4);
translate([(BatteryLength + GuideRadius),GuideOffset/2,CaseThickOffset])
PolyCyl(2*GuideRadius,(BatteryThick - Protrusion),4);
translate([(BatteryLength + GuideRadius),(BatteryWidth - GuideOffset/2),CaseThickOffset])
PolyCyl(2*GuideRadius,(BatteryThick - Protrusion),4);
}
//-- Contact pins (holes therefore)
module PinShape() {
union() {
cylinder(r=(PinTipDia + HoleWindage)/2,h=(PinTipLength + Protrusion),$fn=6);
translate([0,0,PinTipLength])
cylinder(r=(PinShaftDia + HoleWindage)/2,
h=(PinTaperLength + PinShaftLength + Protrusion),$fn=6);
translate([0,0,(PinLength - PinFerruleLength)])
cylinder(r=(PinFerruleDia + HoleWindage)/2,
h=(PinFerruleLength + Protrusion),$fn=6);
translate([0,0,(PinLength)])
cylinder(r=(SpringDia + HoleWindage)/2,
h=(SpringLength + Protrusion),$fn=6);
translate([0,0,(PinLength + SpringLength - HoleWindage)]) // windage for hole length
cylinder(r=(SpringPlugOD + HoleWindage)/2,h=3*SpringPlugLength,$fn=SpringPlugSides);
// translate([0,0,(PinLength + SpringLength + SpringPlugLength)])
// cylinder(r=(SpringPlugOD + HoleWindage)/2,h=2*SpringPlugLength,$fn=SpringPlugSides); // extend hole
}
}
module PinAssembly() {
translate([ExtendRelax,ContactOffset,CaseThickOffset + ContactHeight]) {
rotate([0,270,0]) {
PinShape(); // pins
translate([0,(1*ContactOC),0])
PinShape();
}
}
}
//-- Alignment pins
module AlignPins() {
for (x=[-1,1])
translate([x*(LidLength - 2*AlignPinInset)/2,AlignPinOffset,0])
rotate(45)
PolyCyl(AlignPinOD,AlignPinLength);
}
//-- Case with origin at battery corner
module Case() {
difference() {
union() {
difference() {
translate([(CaseLength/2 + CaseLengthOffset),
(CaseWidth/2 + CaseWidthOffset),
(CaseThick/2)])
roundedBox([CaseLength,CaseWidth,CaseThick],CornerRadius); // basic case shape
translate([-ExtendOvertravel,-GuideRadius,CaseThickOffset])
cube([(BatteryLength + GuideRadius + ExtendOvertravel),
(BatteryWidth + 2* GuideRadius),
(BatteryThick + Protrusion)]); // battery space
}
Guides();
translate([-ExtendOvertravel,-GuideRadius,BaseThick])
cube([(AlignDepth + ExtendOvertravel),
(AlignWidth1 + GuideRadius),
AlignThick]); // alignment blocks
translate([-ExtendOvertravel,
(BatteryWidth - AlignWidth2),
BaseThick])
cube([(AlignDepth + ExtendOvertravel),
(AlignWidth2 + GuideRadius),
AlignThick]);
}
translate([(-ExtendOvertravel),
(CaseWidthOffset - Protrusion),
(CaseThickOffset + BatteryThick)])
cube([CaseLength,
(CaseWidth + 2*Protrusion),
(TopThick + Protrusion)]); // battery access
translate([(CaseLengthOffset - Protrusion),
(CaseWidthOffset - Protrusion),
(CaseThickOffset + BatteryThick)])
cube([(CaseLength + 2*Protrusion),
(CaseWidth + 2*Protrusion),
(TopThick + Protrusion)]); // battery insertion allowance
translate([(BatteryLength - Protrusion),
(CaseWidth/2 + CaseWidthOffset),
(CaseThickOffset + ThumbRadius)])
rotate([90,0,0])
rotate([0,90,0])
cylinder(r=ThumbRadius,
h=(WallThick + GuideRadius + 2*Protrusion),
$fn=22); // remove thumb notch
PinAssembly();
translate([-LidLength/2,BatteryWidth/2,CaseThick - TopThick - (AlignPinLength - TopThick/2)])
AlignPins();
}
}
module Lid() {
difference() {
translate([0,0,(CaseThick/2 - BaseThick - BatteryThick)])
roundedBox([LidLength,
CaseWidth,CaseThick],CornerRadius);
translate([0,0,-(CaseThick/2)])
cube([(LidLength + 2*Protrusion),
(CaseWidth + 2*Protrusion),
(CaseThick)],center=true);
translate([-ExtendRelax,0,-(AlignPinLength - TopThick/2)])
AlignPins();
}
}
module PlugShape() {
difference() {
cylinder(r=SpringPlugOD/2,h=SpringPlugLength,$fn=SpringPlugSides);
translate([0,0,-Protrusion])
PolyCyl(SpringPlugID,(SpringPlugLength + 2*Protrusion),SpringPlugSides);
}
}
module Plugs() {
translate([0,ContactOC,0])
PlugShape();
translate([0,-ContactOC,0])
PlugShape();
}
//-------------------
// Build it!
ShowPegGrid();
if (Layout == "Case")
Case();
if (Layout == "Lid")
Lid();
if (Layout == "Plugs")
for (i=[-1:1])
translate([i*1.5*SpringPlugOD,0,0])
Plugs();
if (Layout == "Pins")
PinShape();
if (Layout == "AlignPins")
AlignPins();
if (Layout == "Show") { // reveal pin assembly
difference() {
Case();
translate([(CaseLengthOffset - Protrusion),
(CaseWidthOffset - Protrusion + WallThick + ContactOffset + ContactOC),
(BaseThick + ContactHeight)])
cube([(-CaseLengthOffset + Protrusion),
(CaseWidth + 2*Protrusion),
CaseThick + BaseThick - ContactHeight + Protrusion]);
translate([(CaseLengthOffset - Protrusion),
(CaseWidthOffset - Protrusion),
-Protrusion])
cube([(-CaseLengthOffset + Protrusion),
(WallThick + GuideRadius + ContactOffset + Protrusion),
CaseThick]);
}
translate([ExtendRelax,ContactOffset,(CaseThickOffset + ContactHeight)]) { // pins
rotate([0,270,0]) {
%PinShape();
// translate([0,(2*ContactOC),0])
// %PinShape();
}
}
translate([CaseLengthOffset,ContactOffset,(CaseThickOffset + ContactHeight)])
rotate([0,90,0])
PlugShape();
}
if (Layout == "Build") {
translate([-(CaseLength/2 + CaseLengthOffset),-(CaseWidthOffset - BuildOffset),0])
Case();
translate([CaseWidth/2,(CaseLengthOffset/2 - BuildOffset),0])
rotate([0,0,90])
Lid();
for (i=[-1:1])
translate([CaseLengthOffset/2 + i*1.5*SpringPlugOD,-CaseWidth/2,0])
Plugs();
}
if (Layout == "Fit") {
Case();
translate([(-LidLength/2 + ExtendRelax),
(CaseWidth/2 + CaseWidthOffset),
(BaseThick + BatteryThick + Gap)])
Lid();
translate([ExtendRelax,ContactOffset,CaseThickOffset + ContactHeight]) { // pins
rotate([0,270,0]) {
%PinShape();
translate([0,(1*ContactOC),0])
%PinShape();
}
}
translate([CaseLengthOffset,
(ContactOffset + ContactOC),
(CaseThickOffset + ContactHeight)])
rotate([0,90,0])
Plugs();
translate([-LidLength/2,BatteryWidth/2,CaseThick])
# AlignPins();
}