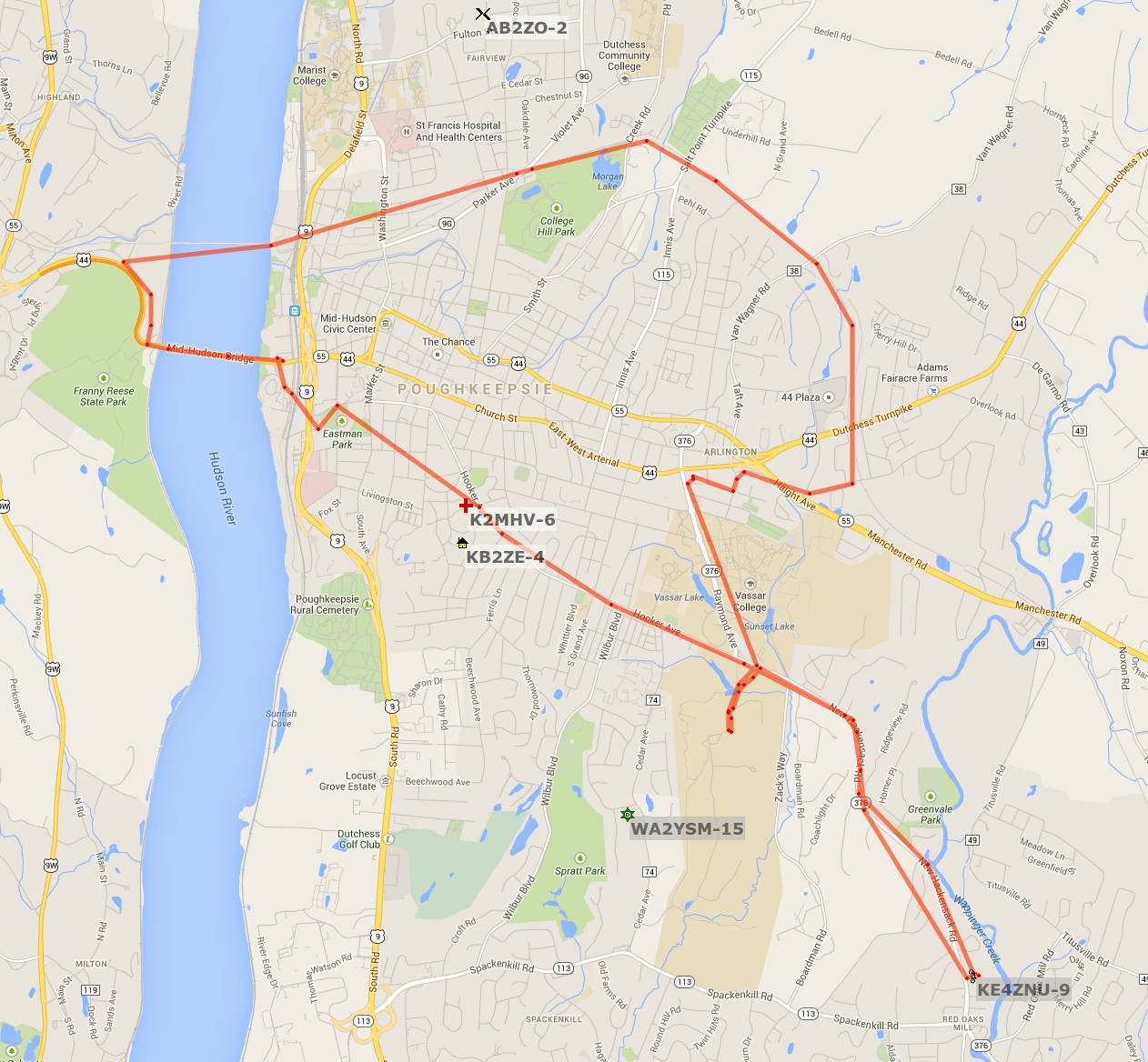
Verily, ’tis the season for turtles on the move. This one clunked over the curb on Raymond Avenue at Vassar Lake, couldn’t find an escape route, and got smashed:

Turtle armor works pretty well against their usual predators, but can’t handle automobile tire impacts.
That’s a tight crop from the helmet camera, with terrible compression artifacts smearing the spalled concrete sidewalk.
For whatever reason, NYSDOT can’t do concrete sidewalks; the entire length of Raymond Avenue has lousy concrete. The fact that Vassar College B&G uses the sidewalks as their private golf-cart highway may have something to do with it, but that’s not the primary problem, because the concrete on DOT’s showcase Rt 55 between Burnett Blvd and Titusville Rd looks the same way.