Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Rather than start with the stepper, I wired an LED and resistor between output bit 07 and Field Ground at the power supply:
Mesa 5i26-7i76 with LED
It’s worth noting that the terminals labeled GND on TB2 and TB3 are isolated from the Field GROUND terminal on TB1. When Mesa says “isolated power supply”, that’s exactly what they mean.
The digital output bits connect +24 VDC Field Power to the load, which should then connect to Field GROUND. I picked a good-looking 5 V panel LED from the pile, simply because it had wires soldered to it from a previous life, and put a 1 K resistor in series to drop the other 19 V.
Then you start up HAL, load the Mesa drivers, and twiddle the bit:
The thread runs with a 1 ms period, mostly because it’s convenient. The .read and .write pins transfer data from and to the 5i25 FPGA each time the thread runs; if you forget those, nothing happens.
Setting the output bit true activates the output bit, turns on the MOSFET driver, and connects the terminal to Field Power = 24 VDC. The 7i76 outputs do not sink current, they source it.
A journey of a thousand 3D printed objects starts with a single LED…
The watchdog timer ought to be connected to something more fragile and UI-related than the main thread, but I haven’t figured out how to do that yet.
First up: note that Mesa uses a capital I (“eye”) in the part numbers, a decision which they’ve surely had plenty of time to regret, as many common fonts exhibit nearly identical capital-I and digit-1 characters.
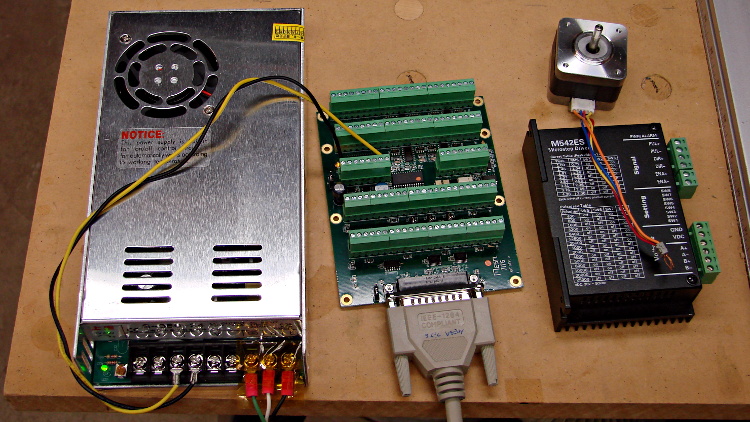
The 7i76 connects to the 5i25 in the PC through a Mesa-supplied IEEE-1284 printer cable. I cobbled up a 24 VDC power supply (which I’ll eventually be using for the M2 motors) to provide “field power” and let the firmware identify the daughtercard:
24 VDC power supply – Mesa 7i76 – stepper driver
The default jumper positions on both cards work fine.
The unconnected stepper driver brick and motor will serve as a simple demonstration after I’ve built the Eagle parts to represent the 5i25’s components. However, the first demo of any new hardware must be a blinking LED.
To see whether the cards work and are detected, load the hostmot2 drivers in halrun and dump all the information:
halrun
halcmd: loadrt hostmot2
halcmd: loadrt hm2_pci
halcmd: show all
Loaded HAL Components:
ID Type Name PID State
5 RT hm2_pci ready
3 User halcmd5010 5010 ready
4 RT hostmot2 ready
Component Pins:
Owner Type Dir Value Name
5 bit OUT FALSE hm2_5i25.0.7i76.0.0.input-00
5 bit OUT FALSE hm2_5i25.0.7i76.0.0.input-00-not
5 bit OUT FALSE hm2_5i25.0.7i76.0.0.input-01
... snippage ...
5 bit OUT FALSE hm2_5i25.0.7i76.0.0.input-30
5 bit OUT FALSE hm2_5i25.0.7i76.0.0.input-30-not
5 bit OUT FALSE hm2_5i25.0.7i76.0.0.input-31
5 bit OUT FALSE hm2_5i25.0.7i76.0.0.input-31-not
5 bit IN FALSE hm2_5i25.0.7i76.0.0.output-00
5 bit IN FALSE hm2_5i25.0.7i76.0.0.output-01
... snippage ...
5 bit IN FALSE hm2_5i25.0.7i76.0.0.output-15
5 bit IN FALSE hm2_5i25.0.7i76.0.0.spindir
5 bit IN FALSE hm2_5i25.0.7i76.0.0.spinena
5 float IN 0 hm2_5i25.0.7i76.0.0.spinout
5 s32 OUT 0 hm2_5i25.0.encoder.00.count
5 s32 OUT 0 hm2_5i25.0.encoder.00.count-latched
5 bit I/O FALSE hm2_5i25.0.encoder.00.index-enable
5 bit IN FALSE hm2_5i25.0.encoder.00.latch-enable
5 bit IN FALSE hm2_5i25.0.encoder.00.latch-polarity
5 float OUT 0 hm2_5i25.0.encoder.00.position
5 float OUT 0 hm2_5i25.0.encoder.00.position-latched
5 s32 OUT 0 hm2_5i25.0.encoder.00.rawcounts
5 s32 OUT 0 hm2_5i25.0.encoder.00.rawlatch
5 bit IN FALSE hm2_5i25.0.encoder.00.reset
5 float OUT 0 hm2_5i25.0.encoder.00.velocity
5 s32 OUT 0 hm2_5i25.0.encoder.01.count
... snippage ...
5 float OUT 0 hm2_5i25.0.encoder.01.velocity
5 bit OUT FALSE hm2_5i25.0.gpio.000.in
5 bit OUT TRUE hm2_5i25.0.gpio.000.in_not
5 bit OUT FALSE hm2_5i25.0.gpio.001.in
... snippage ...
5 bit OUT TRUE hm2_5i25.0.gpio.032.in
5 bit OUT FALSE hm2_5i25.0.gpio.032.in_not
5 bit OUT TRUE hm2_5i25.0.gpio.033.in
5 bit OUT FALSE hm2_5i25.0.gpio.033.in_not
5 bit IN FALSE hm2_5i25.0.led.CR01
5 bit IN FALSE hm2_5i25.0.led.CR02
5 u32 IN 0x00000000 hm2_5i25.0.sserial.channel
5 u32 IN 0x00000000 hm2_5i25.0.sserial.parameter
5 u32 IN 0x00000000 hm2_5i25.0.sserial.port
5 u32 OUT 0x00000000 hm2_5i25.0.sserial.port-0.fault-count
5 u32 OUT 0x00000000 hm2_5i25.0.sserial.port-0.port_state
5 bit IN TRUE hm2_5i25.0.sserial.port-0.run
5 bit IN FALSE hm2_5i25.0.sserial.read
5 u32 OUT 0x00000000 hm2_5i25.0.sserial.state
5 u32 IN 0x00000000 hm2_5i25.0.sserial.value
5 bit IN FALSE hm2_5i25.0.sserial.write
5 bit IN FALSE hm2_5i25.0.stepgen.00.control-type
5 s32 OUT 0 hm2_5i25.0.stepgen.00.counts
5 float OUT 0 hm2_5i25.0.stepgen.00.dbg_err_at_match
5 float OUT 0 hm2_5i25.0.stepgen.00.dbg_ff_vel
5 float OUT 0 hm2_5i25.0.stepgen.00.dbg_pos_minus_prev_
5 float OUT 0 hm2_5i25.0.stepgen.00.dbg_s_to_match
5 s32 OUT 0 hm2_5i25.0.stepgen.00.dbg_step_rate
5 float OUT 0 hm2_5i25.0.stepgen.00.dbg_vel_error
5 bit IN FALSE hm2_5i25.0.stepgen.00.enable
5 float IN 0 hm2_5i25.0.stepgen.00.position-cmd
5 float OUT 0 hm2_5i25.0.stepgen.00.position-fb
5 float IN 0 hm2_5i25.0.stepgen.00.velocity-cmd
5 float OUT 0 hm2_5i25.0.stepgen.00.velocity-fb
5 bit IN FALSE hm2_5i25.0.stepgen.01.control-type
... snippage ...
5 float OUT 0 hm2_5i25.0.stepgen.09.velocity-fb
5 bit I/O FALSE hm2_5i25.0.watchdog.has_bit
... snippage ...
Parameters:
Owner Type Dir Value Name
5 bit RW FALSE hm2_5i25.0.7i76.0.0.output-00-invert
5 bit RW FALSE hm2_5i25.0.7i76.0.0.output-01-invert
... snippage ...
5 bit RW FALSE hm2_5i25.0.7i76.0.0.output-15-invert
5 u32 RO 0x100000A5 hm2_5i25.0.7i76.0.0.serial-number
5 bit RW FALSE hm2_5i25.0.7i76.0.0.spindir-invert
5 bit RW FALSE hm2_5i25.0.7i76.0.0.spinena-invert
5 float RW 100 hm2_5i25.0.7i76.0.0.spinout-maxlim
5 float RW 0 hm2_5i25.0.7i76.0.0.spinout-minlim
5 float RW 100 hm2_5i25.0.7i76.0.0.spinout-scalemax
5 u32 RO 0x00000000 hm2_5i25.0.7i76.0.0.status
5 bit RW FALSE hm2_5i25.0.encoder.00.counter-mode
5 bit RW TRUE hm2_5i25.0.encoder.00.filter
5 bit RW FALSE hm2_5i25.0.encoder.00.index-invert
5 bit RW FALSE hm2_5i25.0.encoder.00.index-mask
5 bit RW FALSE hm2_5i25.0.encoder.00.index-mask-invert
5 float RW 1 hm2_5i25.0.encoder.00.scale
5 float RW 0.5 hm2_5i25.0.encoder.00.vel-timeout
5 bit RW FALSE hm2_5i25.0.encoder.01.counter-mode
... snippage ...
5 float RW 0.5 hm2_5i25.0.encoder.01.vel-timeout
5 bit RW FALSE hm2_5i25.0.gpio.000.invert_output
5 bit RW FALSE hm2_5i25.0.gpio.000.is_opendrain
5 bit RW FALSE hm2_5i25.0.gpio.001.invert_output
... snippage ...
5 bit RW FALSE hm2_5i25.0.gpio.030.invert_output
5 bit RW FALSE hm2_5i25.0.gpio.030.is_opendrain
5 bit RW FALSE hm2_5i25.0.gpio.030.is_output
5 bit RW FALSE hm2_5i25.0.io_error
5 s32 RO 0 hm2_5i25.0.pet_watchdog.time
5 s32 RW 0 hm2_5i25.0.pet_watchdog.tmax
5 s32 RO 0 hm2_5i25.0.read.time
5 s32 RW 0 hm2_5i25.0.read.tmax
5 s32 RO 0 hm2_5i25.0.read_gpio.time
5 s32 RW 0 hm2_5i25.0.read_gpio.tmax
5 u32 RW 0x00000001 hm2_5i25.0.sserial.port-0.fault-dec
5 u32 RW 0x0000000A hm2_5i25.0.sserial.port-0.fault-inc
5 u32 RW 0x000000C8 hm2_5i25.0.sserial.port-0.fault-lim
5 u32 RW 0x00077FE2 hm2_5i25.0.stepgen.00.dirhold
5 u32 RW 0x00077FE2 hm2_5i25.0.stepgen.00.dirsetup
5 float RW 1 hm2_5i25.0.stepgen.00.maxaccel
5 float RW 0 hm2_5i25.0.stepgen.00.maxvel
5 float RW 1 hm2_5i25.0.stepgen.00.position-scale
5 u32 RW 0x00000000 hm2_5i25.0.stepgen.00.step_type
5 u32 RW 0x00077FE2 hm2_5i25.0.stepgen.00.steplen
5 u32 RW 0x00077FE2 hm2_5i25.0.stepgen.00.stepspace
5 u32 RW 0x00077FE2 hm2_5i25.0.stepgen.01.dirhold
... snippage ...
5 u32 RW 0x00077FE2 hm2_5i25.0.stepgen.09.stepspace
5 u32 RW 0x004C4B40 hm2_5i25.0.watchdog.timeout_ns
5 s32 RO 0 hm2_5i25.0.write.time
5 s32 RW 0 hm2_5i25.0.write.tmax
5 s32 RO 0 hm2_5i25.0.write_gpio.time
5 s32 RW 0 hm2_5i25.0.write_gpio.tmax
Parameter Aliases:
Alias Original Name
Exported Functions:
Owner CodeAddr Arg FP Users Name
00005 fc3d2582 f1b17000 NO 0 hm2_5i25.0.pet_watchdog
00005 fc3c49dc f1b17000 YES 0 hm2_5i25.0.read
00005 fc3c4906 f1b17000 YES 0 hm2_5i25.0.read_gpio
00005 fc3c4936 f1b17000 YES 0 hm2_5i25.0.write
00005 fc3c48d6 f1b17000 YES 0 hm2_5i25.0.write_gpio
... snippage ...
Extract the 5i25 pin assignments from the kernel log file: dmesg | grep hm2
I am, perhaps, easily confused, but it took me a while to realize those pin assignments apply to the 5i25 back panel and on-card connectors, not the 7i76 daughter card’s screw terminals. Yeah, it says 5i25 right there in the dump, but …
The Fine 7i76 Manual gives the 7i76 pin connections, so they’re not even slightly hidden. [sigh]
I planned to use an old Dell Inspiron 531S AMD desktop for the LinuxCNC installation, but it turned out to have terrible interrupt latency, despite fiddling with all the available BIOS settings and video drivers. Mostly, it ran fine, but would occasionally burp up a millisecond-long latency spike for no apparent reason. So it’s now on the harvest / recycle heap.
A new-to-me off-lease Dell Optiplex 760 Core 2 Duo in the SDT (Small Desktop Tower) configuration has similar latency numbers:
Optiplex 760 latency – isolcpu 1
What’s important here is that the latency remains rock-solid stable at those numbers. Contrary to my experience with the D520 and D525 Atoms, isolating one CPU for the real-time tasks didn’t make any noticeable difference, but it’s running that way because the overall performance isn’t a problem.
Latency around 20 μs is near the upper limit for successful software step generation at any reasonable pace; the LinuxCNC description has more details. In round numbers, running the M2 at 500 mm/s needs a 40 kHz step rate in 1/16 microstep mode = a 25 μs period, which means 20 μs of jitter wouldn’t work well at all. Which is why I’m using Mesa FPGA card to get hardware step generation: it makes such problems Go Away.
The Optiplex arrived with Windows Vista Business preinstalled; it dates back to mid-2009. I used System Rescue CD to shrink the Windows partition, added a few more, then installed LinuxCNC direct from the CD image (based on Ubuntu 10.04 LTS) and Xubuntu 13.04. The latter serves as a general-purpose installation for times when I don’t need LinuxCNC, because 10.04 is pretty much obsolete for anything other than real-time control.
Digression 1: Yes, 10.04 LTS. TheRTAI project hasn’t released the patches that will slip the real-time kernel under the stock 3.x Linux kernel: LinuxCNC remains stuck at 10.04 LTS. Those changes have been coming Real Soon Now for quite a while; as with most Open Source projects, they could use more manpower and money. This isn’t a problem, as LinuxCNC is used for motion control, not a general-purpose operating system.
The SDT case has room for two PCI cards and one PCI-E video card, so I installed the dual-head video card that couldn’t handle the U2711 monitor’s dual-DVI connection (although I’m using only DVI Output 1) and a Mesa 5i25. The middle “card” is actually a tiny PCB connected to a ribbon cable that brings out a second serial port (remember serial ports?) and what could be either or both of a PS2 keyboard or mouse connection (remember PS/2?).
Optiplex 760 SDT – dual DVI – serial – 5i25
The back panel has a parallel printer port (which may come in handy for something) and a serial port, although you’re expected to have USB mice and keyboards these days. The front panel even has a floppy drive…
Digression 2: LinuxCNC does not require a parallel printer port; this seems to be a common misconception among folks who don’t actually know how it works. The Mesa 5i25 FPGA card with a 7i76 step-direction daughter board provides high-resolution timing for five axes, rotary encoder inputs, a bunch of buffered digital I/O bits, a watchdog timer, plus various other useful odds and ends, all behind handy screw terminals.
The Optiplex 760 has on-board VGA-class video that would also work fine, but the monitor I’m using has its VGA input connected to the box driving the Sherline mill and an unused DVI input. Having that dual-DVI monitor card lying around, I figured I could attach the same monitor to both systems and just poke the monitor’s input section button; I’ve found KVM switches unreliable in this application.
The usual setup preps the system for public-key SSH on a nonstandard port, sets up the NFS mounts, and tweaks this-and-that: it’s running just fine.
Digression 3: SSH kvetches when you swap server boxes at the same IP address, as well it should. If you’re foolish enough to have two separate Linux installs on the same box with the same IP, SSH reminds you every time you boot the other distro…
This plug for a portable air conditioner’s window vent may be un-buildable with my current state of 3D printer-fu. The top view shows the recess for a disk of insulating foam:
Portable AC Vent Plug – solid model – top
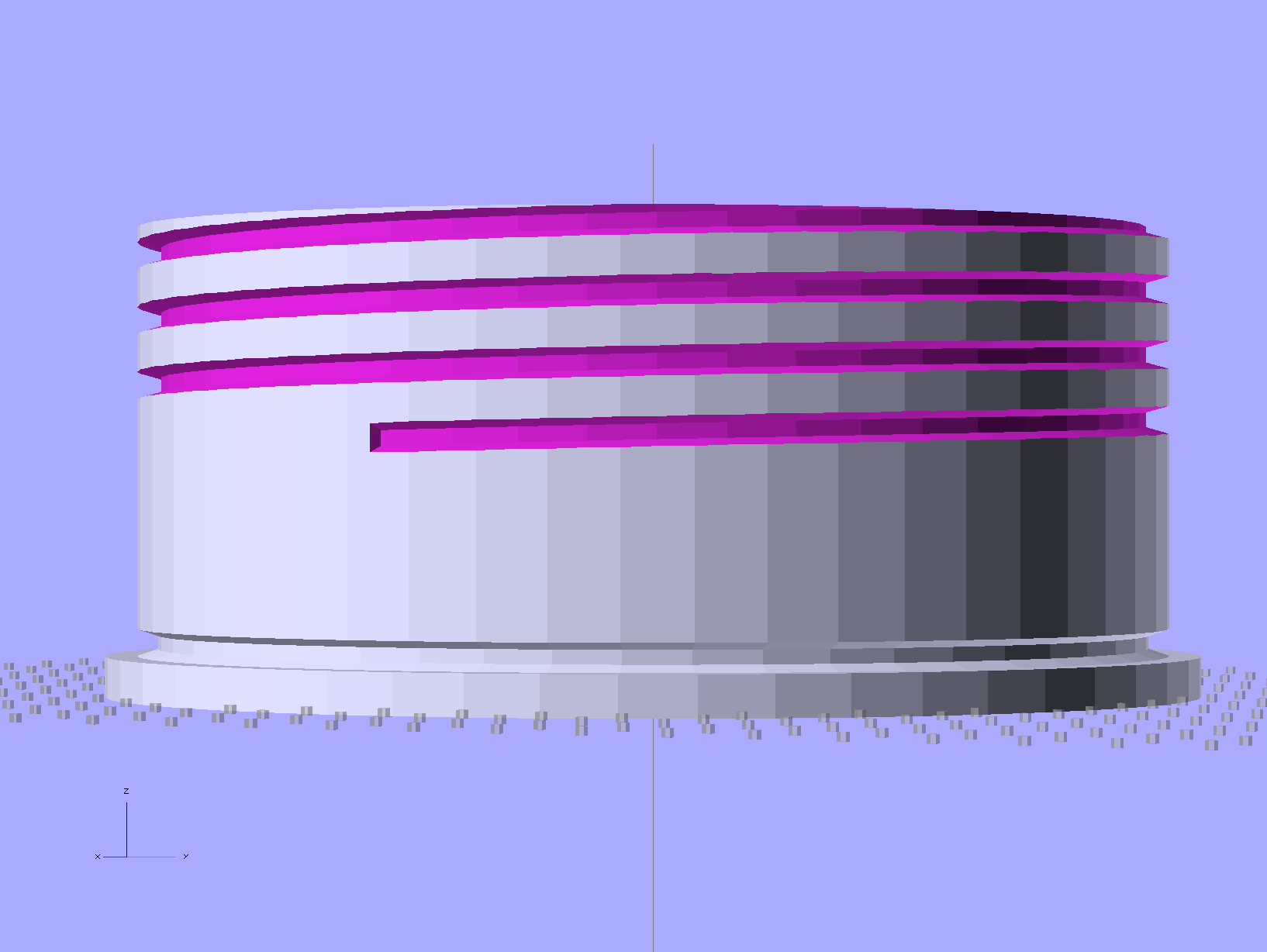
The side view shows the thread profile and the groove for the O-ring seal:
Portable AC Vent Plug – solid model – side
The bottom view shows the hemispheric finger grip recess:
Portable AC Vent Plug – solid model – bottom
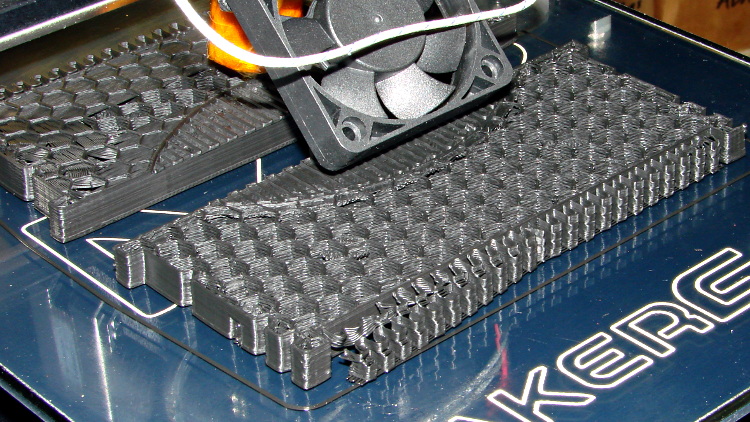
Basically, that design requires extensive support material no matter how it’s laid out. I tried the obvious way without any support, but that huge flat surface popped off the glass:
AC Vent Plug – flat build
The thread and groove overhangs in that orientation would require support and then extensive cleanout. Slic3r doesn’t do a good job of supporting internal layers, so the bottom of the recesses tend to flop into the hexagonal infill. I’m not sure building internal support all the way up the inside of the threads would be a Good Thing, though.
Rotating by 90 degrees and cutting it in half failed because the automagic support structure popped off the platform:
AC Vent Plug – split build
Admittedly, that was before I started using hairspray (on the platform!), but both orientations require far too much support. In fact, the rotated version might weigh half a kilo…
I’m also generating the thread elements incorrectly; the joints don’t meet smoothly at the junctions. I think tapering each element so the smaller end nests inside the larger end will work better. Perhaps using a scaled hexagonal element would be better / faster than the current extruded 2D shape?
I think the correct way to proceed will be a 3D print of the finger grip and flange section, oriented so the hemisphere points upward, with the threaded section made from a length of PVC pipe with lathe-turned threads and O-ring groove, butted against the flange around the grip section.
Problem: that’s an 8 mm pitch thread and my inch-size lathe doesn’t do metric:
Need: 8 mm = 0.315 in → 3.175 TPI
Closest: 3-1/4 TPI → 0.308 in = 7.82 mm
Worse: 3 TPI → 0.333 in = 8.47 mm
The plug needs about three turns, which means the 3-1/4 TPI = 7.82 mm pitch thread would be off by 0.54 mm, roughly a third of the thread form’s crest. That might actually work, as the “thread” on the inside of the pipe this thing fits into is actually a thin ridge, rather than an actual thread shape, and the plug is supposed to jam against the flange anyway.
Maybe a four-axis setup in the Sherline, with the rotary table holding the PVC pipe (or whatever) aligned with the X axis? It would just barely fit under the spindle with the end mill in a collet.
The pipe rack doesn’t hold any suitable plastic pipe.
Dan Newman’s TC4Server turns the TC4 thermocouple board into a USB HID input device that’s compatible with HAL’s hal_input module:
TC4 on ProtoScrewShield on Leonardo
For simplicity (i.e., to avoid writing a special driver), TC4Server misrepresents itself as a nine-axis joystick-like device suited for RC airplane control:
halrun
halcmd: loadusr -W hal_input +A Leonardo
halcmd: show
... snippage ...
Component Pins:
Owner Type Dir Value Name
5 s32 OUT 2941 input.0.abs-rudder-counts
5 s32 IN 4095 input.0.abs-rudder-flat
5 s32 IN 255 input.0.abs-rudder-fuzz
5 bit OUT TRUE input.0.abs-rudder-is-neg
5 bit OUT FALSE input.0.abs-rudder-is-pos
5 float IN 32767.5 input.0.abs-rudder-offset
5 float OUT -0.9102464 input.0.abs-rudder-position
5 float IN 32767.5 input.0.abs-rudder-scale
5 s32 OUT 2947 input.0.abs-rx-counts
5 s32 IN 4095 input.0.abs-rx-flat
5 s32 IN 255 input.0.abs-rx-fuzz
5 bit OUT TRUE input.0.abs-rx-is-neg
5 bit OUT FALSE input.0.abs-rx-is-pos
5 float IN 32767.5 input.0.abs-rx-offset
5 float OUT -0.9100633 input.0.abs-rx-position
5 float IN 32767.5 input.0.abs-rx-scale
5 s32 OUT 65535 input.0.abs-ry-counts
5 s32 IN 4095 input.0.abs-ry-flat
5 s32 IN 255 input.0.abs-ry-fuzz
5 bit OUT FALSE input.0.abs-ry-is-neg
5 bit OUT TRUE input.0.abs-ry-is-pos
5 float IN 32767.5 input.0.abs-ry-offset
5 float OUT 1 input.0.abs-ry-position
5 float IN 32767.5 input.0.abs-ry-scale
5 s32 OUT 65535 input.0.abs-rz-counts
5 s32 IN 4095 input.0.abs-rz-flat
5 s32 IN 255 input.0.abs-rz-fuzz
5 bit OUT FALSE input.0.abs-rz-is-neg
5 bit OUT TRUE input.0.abs-rz-is-pos
5 float IN 32767.5 input.0.abs-rz-offset
5 float OUT 1 input.0.abs-rz-position
5 float IN 32767.5 input.0.abs-rz-scale
5 s32 OUT 65535 input.0.abs-throttle-counts
5 s32 IN 4095 input.0.abs-throttle-flat
5 s32 IN 255 input.0.abs-throttle-fuzz
5 bit OUT FALSE input.0.abs-throttle-is-neg
5 bit OUT TRUE input.0.abs-throttle-is-pos
5 float IN 32767.5 input.0.abs-throttle-offset
5 float OUT 1 input.0.abs-throttle-position
5 float IN 32767.5 input.0.abs-throttle-scale
5 s32 OUT 2957 input.0.abs-wheel-counts
5 s32 IN 4095 input.0.abs-wheel-flat
5 s32 IN 255 input.0.abs-wheel-fuzz
5 bit OUT TRUE input.0.abs-wheel-is-neg
5 bit OUT FALSE input.0.abs-wheel-is-pos
5 float IN 32767.5 input.0.abs-wheel-offset
5 float OUT -0.9097581 input.0.abs-wheel-position
5 float IN 32767.5 input.0.abs-wheel-scale
5 s32 OUT 2942 input.0.abs-x-counts
5 s32 IN 4095 input.0.abs-x-flat
5 s32 IN 255 input.0.abs-x-fuzz
5 bit OUT TRUE input.0.abs-x-is-neg
5 bit OUT FALSE input.0.abs-x-is-pos
5 float IN 32767.5 input.0.abs-x-offset
5 float OUT -0.9102159 input.0.abs-x-position
5 float IN 32767.5 input.0.abs-x-scale
5 s32 OUT 2942 input.0.abs-y-counts
5 s32 IN 4095 input.0.abs-y-flat
5 s32 IN 255 input.0.abs-y-fuzz
5 bit OUT TRUE input.0.abs-y-is-neg
5 bit OUT FALSE input.0.abs-y-is-pos
5 float IN 32767.5 input.0.abs-y-offset
5 float OUT -0.9102159 input.0.abs-y-position
5 float IN 32767.5 input.0.abs-y-scale
5 s32 OUT 2940 input.0.abs-z-counts
5 s32 IN 4095 input.0.abs-z-flat
5 s32 IN 255 input.0.abs-z-fuzz
5 bit OUT TRUE input.0.abs-z-is-neg
5 bit OUT FALSE input.0.abs-z-is-pos
5 float IN 32767.5 input.0.abs-z-offset
5 float OUT -0.910277 input.0.abs-z-position
5 float IN 32767.5 input.0.abs-z-scale
5 s32 OUT 2941 input.1.abs-rudder-counts
5 s32 IN 4095 input.1.abs-rudder-flat
5 s32 IN 255 input.1.abs-rudder-fuzz
5 bit OUT TRUE input.1.abs-rudder-is-neg
5 bit OUT FALSE input.1.abs-rudder-is-pos
5 float IN 32767.5 input.1.abs-rudder-offset
5 float OUT -0.9102464 input.1.abs-rudder-position
5 float IN 32767.5 input.1.abs-rudder-scale
5 s32 OUT 2947 input.1.abs-rx-counts
5 s32 IN 4095 input.1.abs-rx-flat
5 s32 IN 255 input.1.abs-rx-fuzz
5 bit OUT TRUE input.1.abs-rx-is-neg
5 bit OUT FALSE input.1.abs-rx-is-pos
5 float IN 32767.5 input.1.abs-rx-offset
5 float OUT -0.9100633 input.1.abs-rx-position
5 float IN 32767.5 input.1.abs-rx-scale
5 s32 OUT 65535 input.1.abs-ry-counts
5 s32 IN 4095 input.1.abs-ry-flat
5 s32 IN 255 input.1.abs-ry-fuzz
5 bit OUT FALSE input.1.abs-ry-is-neg
5 bit OUT TRUE input.1.abs-ry-is-pos
5 float IN 32767.5 input.1.abs-ry-offset
5 float OUT 1 input.1.abs-ry-position
5 float IN 32767.5 input.1.abs-ry-scale
5 s32 OUT 65535 input.1.abs-rz-counts
5 s32 IN 4095 input.1.abs-rz-flat
5 s32 IN 255 input.1.abs-rz-fuzz
5 bit OUT FALSE input.1.abs-rz-is-neg
5 bit OUT TRUE input.1.abs-rz-is-pos
5 float IN 32767.5 input.1.abs-rz-offset
5 float OUT 1 input.1.abs-rz-position
5 float IN 32767.5 input.1.abs-rz-scale
5 s32 OUT 65535 input.1.abs-throttle-counts
5 s32 IN 4095 input.1.abs-throttle-flat
5 s32 IN 255 input.1.abs-throttle-fuzz
5 bit OUT FALSE input.1.abs-throttle-is-neg
5 bit OUT TRUE input.1.abs-throttle-is-pos
5 float IN 32767.5 input.1.abs-throttle-offset
5 float OUT 1 input.1.abs-throttle-position
5 float IN 32767.5 input.1.abs-throttle-scale
5 s32 OUT 2957 input.1.abs-wheel-counts
5 s32 IN 4095 input.1.abs-wheel-flat
5 s32 IN 255 input.1.abs-wheel-fuzz
5 bit OUT TRUE input.1.abs-wheel-is-neg
5 bit OUT FALSE input.1.abs-wheel-is-pos
5 float IN 32767.5 input.1.abs-wheel-offset
5 float OUT -0.9097581 input.1.abs-wheel-position
5 float IN 32767.5 input.1.abs-wheel-scale
5 s32 OUT 2942 input.1.abs-x-counts
5 s32 IN 4095 input.1.abs-x-flat
5 s32 IN 255 input.1.abs-x-fuzz
5 bit OUT TRUE input.1.abs-x-is-neg
5 bit OUT FALSE input.1.abs-x-is-pos
5 float IN 32767.5 input.1.abs-x-offset
5 float OUT -0.9102159 input.1.abs-x-position
5 float IN 32767.5 input.1.abs-x-scale
5 s32 OUT 2942 input.1.abs-y-counts
5 s32 IN 4095 input.1.abs-y-flat
5 s32 IN 255 input.1.abs-y-fuzz
5 bit OUT TRUE input.1.abs-y-is-neg
5 bit OUT FALSE input.1.abs-y-is-pos
5 float IN 32767.5 input.1.abs-y-offset
5 float OUT -0.9102159 input.1.abs-y-position
5 float IN 32767.5 input.1.abs-y-scale
5 s32 OUT 2940 input.1.abs-z-counts
5 s32 IN 4095 input.1.abs-z-flat
5 s32 IN 255 input.1.abs-z-fuzz
5 bit OUT TRUE input.1.abs-z-is-neg
5 bit OUT FALSE input.1.abs-z-is-pos
5 float IN 32767.5 input.1.abs-z-offset
5 float OUT -0.910277 input.1.abs-z-position
5 float IN 32767.5 input.1.abs-z-scale
... snippage ...
Parameters:
Owner Type Dir Value Name
5 s32 RO 65535 input.0.abs-rudder-max
5 s32 RO 0 input.0.abs-rudder-min
5 s32 RO 65535 input.0.abs-rx-max
5 s32 RO 0 input.0.abs-rx-min
5 s32 RO 65535 input.0.abs-ry-max
5 s32 RO 0 input.0.abs-ry-min
5 s32 RO 65535 input.0.abs-rz-max
5 s32 RO 0 input.0.abs-rz-min
5 s32 RO 65535 input.0.abs-throttle-max
5 s32 RO 0 input.0.abs-throttle-min
5 s32 RO 65535 input.0.abs-wheel-max
5 s32 RO 0 input.0.abs-wheel-min
5 s32 RO 65535 input.0.abs-x-max
5 s32 RO 0 input.0.abs-x-min
5 s32 RO 65535 input.0.abs-y-max
5 s32 RO 0 input.0.abs-y-min
5 s32 RO 65535 input.0.abs-z-max
5 s32 RO 0 input.0.abs-z-min
5 s32 RO 65535 input.1.abs-rudder-max
5 s32 RO 0 input.1.abs-rudder-min
5 s32 RO 65535 input.1.abs-rx-max
5 s32 RO 0 input.1.abs-rx-min
5 s32 RO 65535 input.1.abs-ry-max
5 s32 RO 0 input.1.abs-ry-min
5 s32 RO 65535 input.1.abs-rz-max
5 s32 RO 0 input.1.abs-rz-min
5 s32 RO 65535 input.1.abs-throttle-max
5 s32 RO 0 input.1.abs-throttle-min
5 s32 RO 65535 input.1.abs-wheel-max
5 s32 RO 0 input.1.abs-wheel-min
5 s32 RO 65535 input.1.abs-x-max
5 s32 RO 0 input.1.abs-x-min
5 s32 RO 65535 input.1.abs-y-max
5 s32 RO 0 input.1.abs-y-min
5 s32 RO 65535 input.1.abs-z-max
5 s32 RO 0 input.1.abs-z-min
... snippage ...
Dan’s program assigns the outputs thusly:
Wheel – ambient temperature as measured on TC4 board
X Y Z Rudder – thermocouples – channels 1 through 4
RX RY RZ Throttle – thermistors – channels 5 through 8
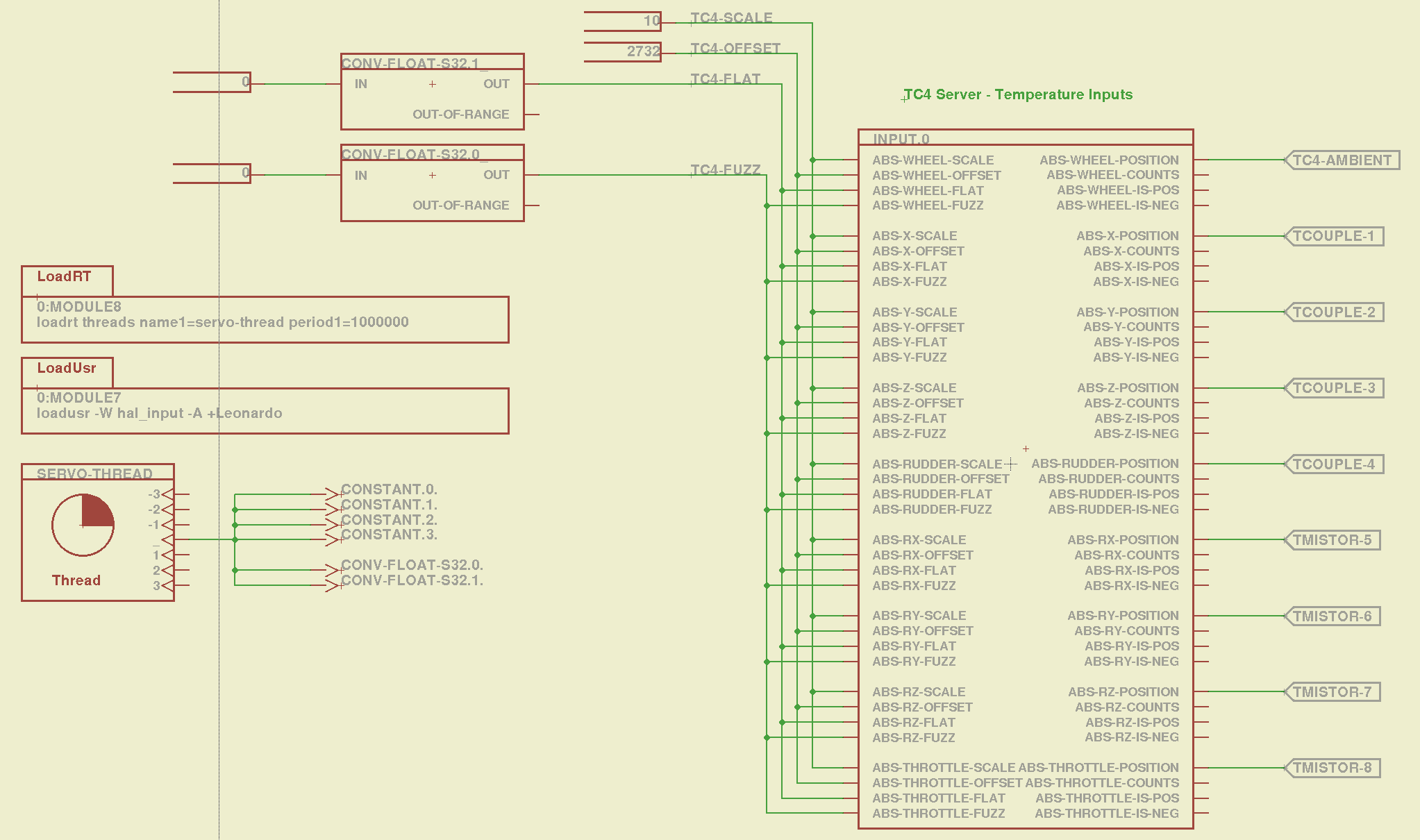
I created a huge Eagle device that encapsulates the whole thing. A simple demo schematic includes the constants that make the temperatures come out in °C:
TC4Server – Eagle Schematic
That picture produces this HAL file:
# HAL config file automatically generated by Eagle-CAD ULP:
# [/mnt/bulkdata/Project Files/eagle/ulp/hal-write-2.5.ulp]
# (C) Martin Schoeneck.de 2008
# Charalampos Alexopoulos 2011
# Mods Ed Nisley KE4ZNU 2010 2013
# Path [/mnt/bulkdata/Project Files/eagle/projects/LinuxCNC for M2/]
# ProjectName [LinuxCNC M2 - TC4Server Test]
# File name [/mnt/bulkdata/Project Files/eagle/projects/LinuxCNC for M2/TC4Server.hal]
# Created [20:03:16 03-Jun-2013]
####################################################
# Load realtime and userspace modules
loadusr -W hal_input -A +Leonardo
loadrt threads name1=servo-thread period1=1000000
loadrt constant count=4
loadrt conv_float_s32 count=2
####################################################
# Hook functions into threads
addf constant.0 servo-thread
addf constant.1 servo-thread
addf constant.2 servo-thread
addf constant.3 servo-thread
addf conv-float-s32.0 servo-thread
addf conv-float-s32.1 servo-thread
####################################################
# Set parameters
####################################################
# Set constants
setp constant.0.value 10
setp constant.1.value 2732
setp constant.2.value 0
setp constant.3.value 0
####################################################
# Connect Modules with nets
net n_2 constant.2.out conv-float-s32.1.in
net n_3 constant.3.out conv-float-s32.0.in
net tc4-ambient input.0.abs-wheel-position
net tc4-flat input.0.abs-wheel-flat input.0.abs-x-flat input.0.abs-y-flat input.0.abs-z-flat input.0.abs-rudder-flat input.0.abs-rx-flat input.0.abs-ry-flat input.0.abs-rz-flat input.0.abs-throttle-flat conv-float-s32.1.out
net tc4-fuzz input.0.abs-throttle-fuzz input.0.abs-rz-fuzz input.0.abs-ry-fuzz input.0.abs-rx-fuzz input.0.abs-rudder-fuzz input.0.abs-z-fuzz input.0.abs-y-fuzz input.0.abs-x-fuzz input.0.abs-wheel-fuzz conv-float-s32.0.out
net tc4-offset input.0.abs-wheel-offset input.0.abs-x-offset input.0.abs-y-offset input.0.abs-z-offset input.0.abs-rudder-offset input.0.abs-rx-offset input.0.abs-ry-offset input.0.abs-rz-offset input.0.abs-throttle-offset constant.1.out
net tc4-scale input.0.abs-wheel-scale input.0.abs-x-scale input.0.abs-y-scale input.0.abs-z-scale input.0.abs-rudder-scale input.0.abs-rx-scale input.0.abs-ry-scale input.0.abs-rz-scale input.0.abs-throttle-scale constant.0.out
net tcouple-1 input.0.abs-x-position
net tcouple-2 input.0.abs-y-position
net tcouple-3 input.0.abs-z-position
net tcouple-4 input.0.abs-rudder-position
net tmistor-5 input.0.abs-rx-position
net tmistor-6 input.0.abs-ry-position
net tmistor-7 input.0.abs-rz-position
net tmistor-8 input.0.abs-throttle-position
Fire it up with halrun to see the temperatures (alphabetically by the pin name):
halrun -I -f TC4Server.hal
halcmd: start
halcmd: show pin *position
Component Pins:
Owner Type Dir Value Name
5 float OUT 20.9 input.0.abs-rudder-position ==> tcouple-4
5 float OUT 21.5 input.0.abs-rx-position ==> tmistor-5
5 float OUT 6280.3 input.0.abs-ry-position ==> tmistor-6
5 float OUT 6280.3 input.0.abs-rz-position ==> tmistor-7
5 float OUT 6280.3 input.0.abs-throttle-position ==> tmistor-8
5 float OUT 22.5 input.0.abs-wheel-position ==> tc4-ambient
5 float OUT 21 input.0.abs-x-position ==> tcouple-1
5 float OUT 21 input.0.abs-y-position ==> tcouple-2
5 float OUT 20.8 input.0.abs-z-position ==> tcouple-3
The sensors do not correspond to the picture at the top: only the first thermocouple and first thermistor are connected ; the ADC returns bogus data for disconnected inputs, which means you must be careful about tightening the wires and checking the result. Dan’s firmware has the ability to disable unused sensors, in which case you get a huge value; when used for heater control, a sensor failing high means the heater will turn off, but, should you use this gadget in a freezer, you might want them to fail low (so modify the code for your own use).
The ambient temperature reported for the board runs 1 or 2 °C higher than the actual ambient air temperature, probably because of all those components doing useful things up close to the sensor chip. That particular ambient temperature serves as the cold junction reference for the thermocouples; the other temperatures don’t change very much as the board warms up, so it’s all good.
Remember to issue the start command in halrun, because otherwise nothing changes.
Also remember that you must configure TC4Server with the thermistor characteristics before you use it as a hal_input device.
It’s garden fence stapling season, which means it’s time for the annual stapler annoyance. There’s supposed to be a plastic tab angling under the right side of the latch, pressing against the bottom of the staple channel and forcing the triangular tab on the top out through a small opening. All that’s left is the stub:
Stapler latch – broken spring tab
It looks like it ought to be a great 3D printing project, but I came to my senses and snipped off a length of phosphor bronze spring stock, rolled it up, and positioned it inside the opening:
Stapler latch – metal spring fitting
The latch slides into the staple channel until the pin on the side you can see above engages a hole in the channel. The spring looked like this on the way in:
Stapler latch – before closing
And now it’s ready for action:
Stapler latch – in place
Works like a champ and took maybe 15 minutes, tops, to accomplish. Shame it took me a few decades to get around to fixing it, but I finally dropped the clipped-and-filed nail I’d been jamming between the latch and the channel one too many times…
Now that Google encrypts your search terms (so they can sell the results to their customers), it’s harder to determine where folks come from. WordPress does report whatever search terms it can, though, and a recent search for plastic kitchen sink strainer caught my eye.
Here’s what you get (or, at least, what I got on that day) by feeding those words into Google Image Search:
Search engine optimization like that is to die for, eh?
The related post described a cleanup operation that didn’t really achieve very much in the long run:
Skimming the strainer
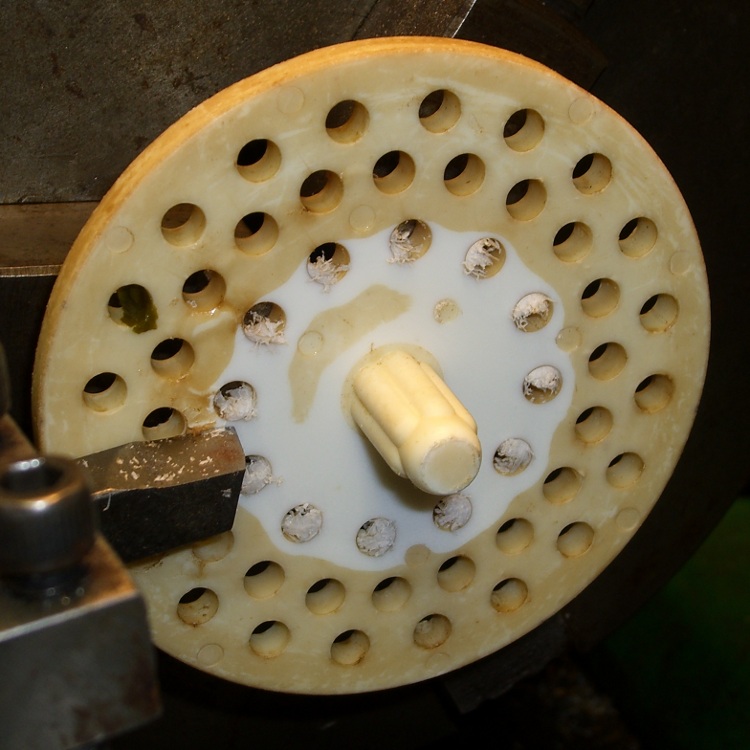
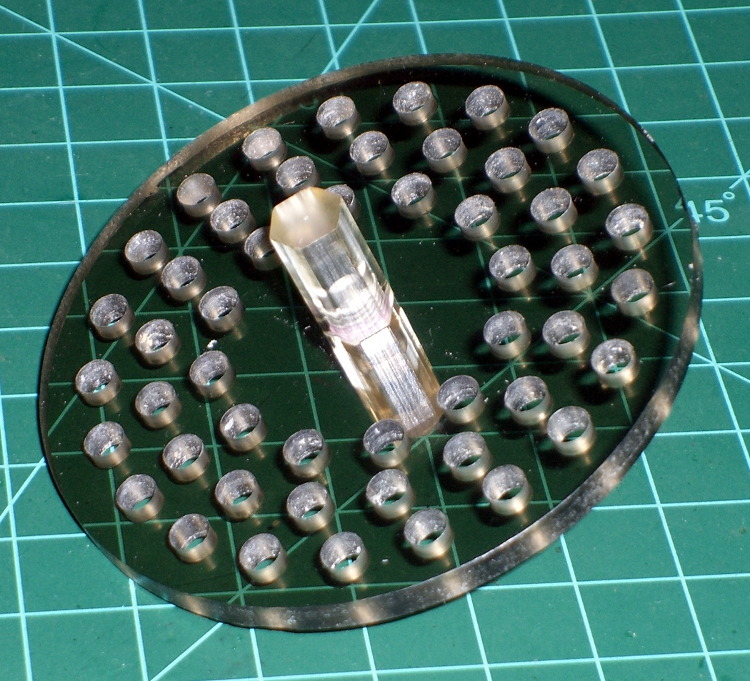
Some years ago I machined a pair of smoke gray acrylic sink strainers (using LinuxCNC / EMC2 loops and trig functions) on the Sherline and wrote it up for my Digital Machinist column. They came out quite nicely:
CNC Sink Strainer
Then I did a 3D printed version on the Thing-O-Matic: