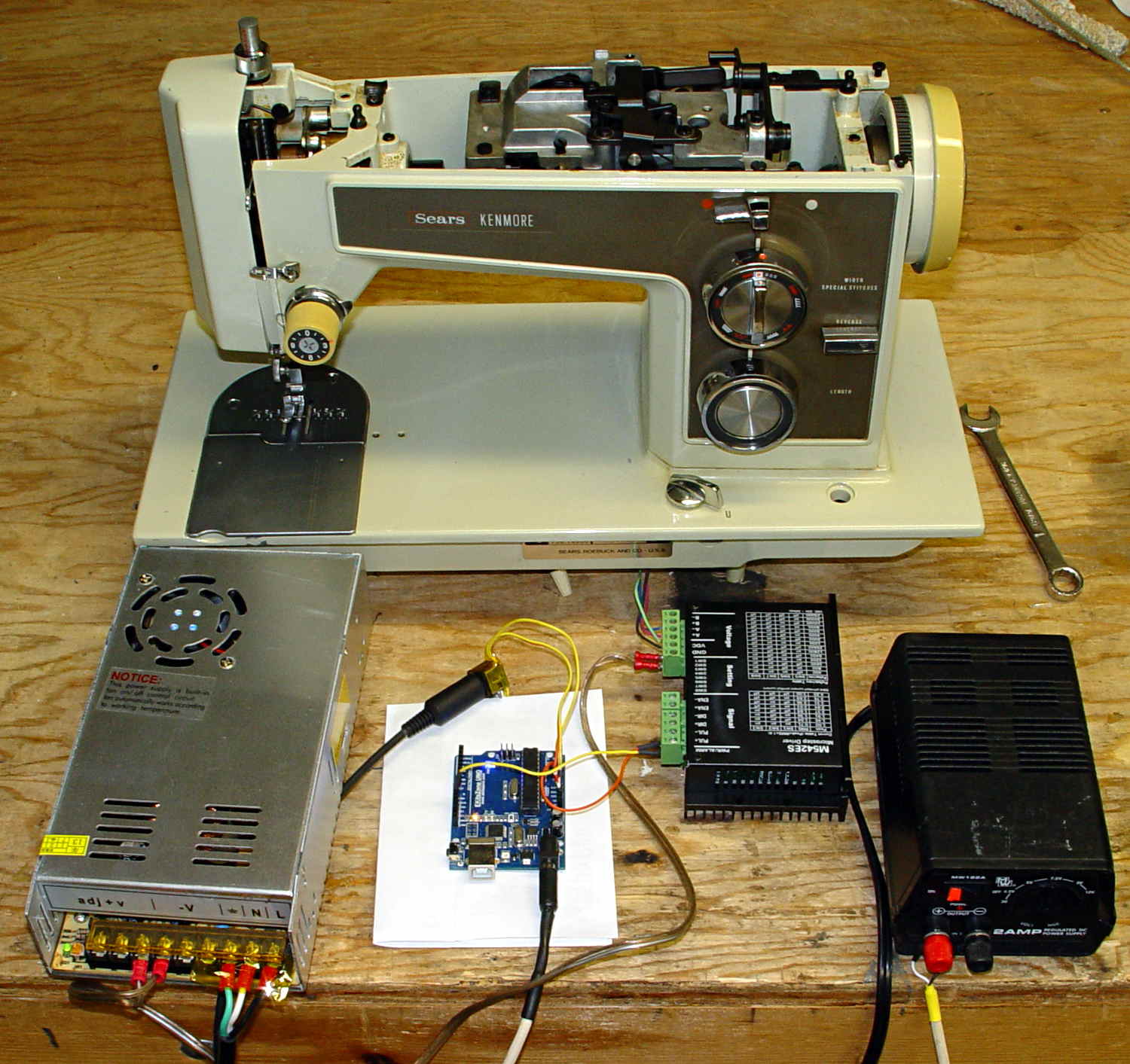
Took a picture of the sewing machine setup with the Sony DSC-F717, transferred it into DigiKam, got the “done transferring, you can disconnect the camera” message, believed it, disconnected the camera, deleted the image file, and then discovered that DigiKam mislaid the image file.
Rather than re-set-up and re-take the shot, I followed my own directions and recovered the image from the Memory Stick:
dmesg | tail [43176.079853] usb 2-1.6.3: New USB device strings: Mfr=1, Product=2, SerialNumber=0 [43176.079855] usb 2-1.6.3: Product: Sony PTP [43176.079856] usb 2-1.6.3: Manufacturer: Sony [43198.073652] usb 2-1.6.3: USB disconnect, device number 22 [43333.788533] sd 9:0:0:0: [sdc] 1947648 512-byte logical blocks: (997 MB/951 MiB) [43333.803292] sd 9:0:0:0: [sdc] No Caching mode page found [43333.803299] sd 9:0:0:0: [sdc] Assuming drive cache: write through [43333.824681] sd 9:0:0:0: [sdc] No Caching mode page found [43333.824688] sd 9:0:0:0: [sdc] Assuming drive cache: write through [43333.825491] sdc: sdc1 sudo dd if=/dev/sdc of=/tmp/pix.bin bs=1M ^C615+0 records in 614+0 records out 643825664 bytes (644 MB) copied, 38.5841 s, 16.7 MB/s strings -t x pix.bin | grep Exif | head 68006 Exif 208006 Exif 3f8005 _Exif 7b8006 Exif 13d8006 Exif 15b0005 wExif 1798005 CExif 19c0006 Exif 1b90006 Exif 1f98005 %Exif dd if=pix.bin of=image03.jpg bs=$((16#1000)) count=1K skip=$((16#3f8)) 1024+0 records in 1024+0 records out 4194304 bytes (4.2 MB) copied, 0.0121431 s, 345 MB/s display image03.jpg convert image03.jpg dsc00656.jpg
Obviously, there was a bit more flailing around than you see here, but that’s the gist of the adventure. For what it’s worth, image01 was a random blurred shot and image02 is the ID picture I keep on all my cameras.
The convert step discards all the junk after the end of the image, so the dsc00656.jpg file doesn’t include anything unexpected.
The picture isn’t all that much to look at, even after cropping out the background, but …
The advantage of the manual method: renewing one’s acquaintance with tools that come in handy for other tasks.