Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
If you know what you’re doing, you can measure the size of the sun and scale the entire solar system from observations like that. Takes more science than I’ll ever accomplish, that’s for sure!
I realized the show was on just before Greatest Transit (roughly what you see above), so I duct-taped a 1 inch spotter / finder scope to a camera tripod, taped a sun shield on the scope, bent some card stock for a screen, then assembled everything on the patio:
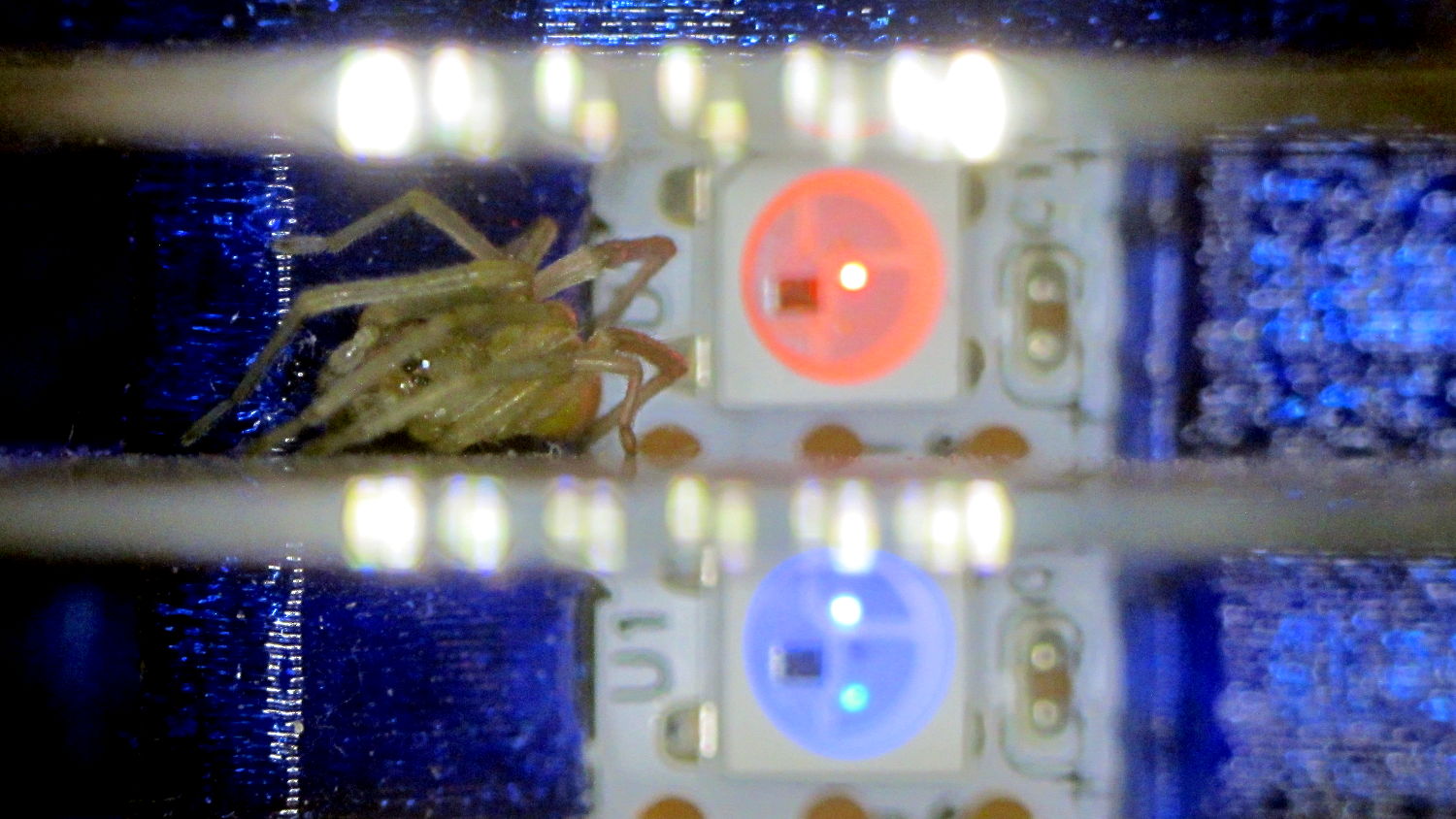
Another of the knockoff Neopixels in the Hard Drive Platter Mood Light failed, even limited to PWM 63 to reduce the temperature. This time, however, I had some help finding the failed blue LED:
Hard Drive Mood Light – failed LED with spider – green
Hard Drive Mood Light – failed LED with spider – white
A day later, she’d built a small web, presumably to improve the odds of catching something yummy. Who am I to disagree?
I should set up a test fixture for all the knockoff Neopixels and run some numbers. They’re definitely a disappointment, even to a bottom feeder such as I …
I now have some difficulty accomplishing what needs to be done:
Basement Shop – right
During the rest of May I must write a pair of columns, unpack / arrange / reinstall my remaining tools / parts / toys, endure a road trip to our Larval Engineer’s graduation (*), enjoy bicycling with my Lady, and surely repair a few odds-n-ends along the way.
I’ll generate occasional posts through June, after which things should be returning to what passes for normal around here…
(*) For reasons not relevant here, our Larval Engineer’s schedule includes a final co-op and wind-up semester after “graduation”. Perhaps she’s entering the Chrysalis phase of her development?
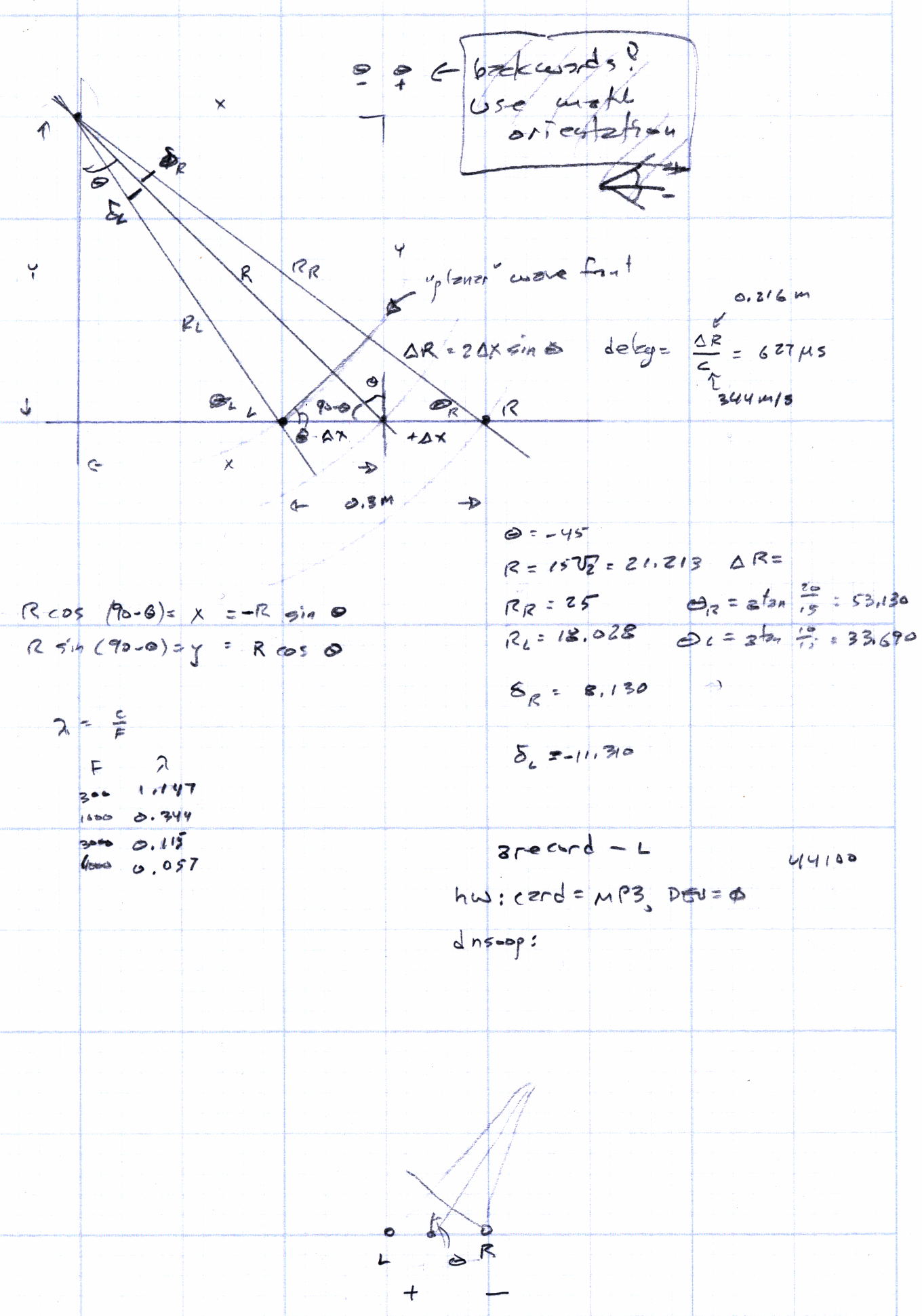
Given a point source of audio (or RF, for that matter) that’s far enough away to produce more-or-less plane wavefronts, the range difference between two microphones (or ears) is:
ΔR = (mic separation) x sin Θ
The angle lies between the perpendicular to the line from the midpoint between the mics counterclockwise to the source source: + for sounds to your left, – for sounds to your right. That’s the trig convention for angular measurement with 0° directly ahead, not the compass convention, but you can argue for either sign if you keep track of what’s going on.
The time delay between the mics, given c = speed of sound:
ΔT = ΔR / c
For microphones 300 mm apart and c = 344 m/s:
ΔT = 872 µs = 0.3 m / 344 m/s
If you delay the sound from the mic closest to the source by that amount, then add the mic signals, you get a monaural result that emphasizes, at least a little bit, sounds from that source in relation to all other sounds.
In principle, you could find the angle by listening for the loudest sound, but that’s a fool’s game.
There’s an obvious symmetry for a source on the same side, at the same angle, toward the rear.
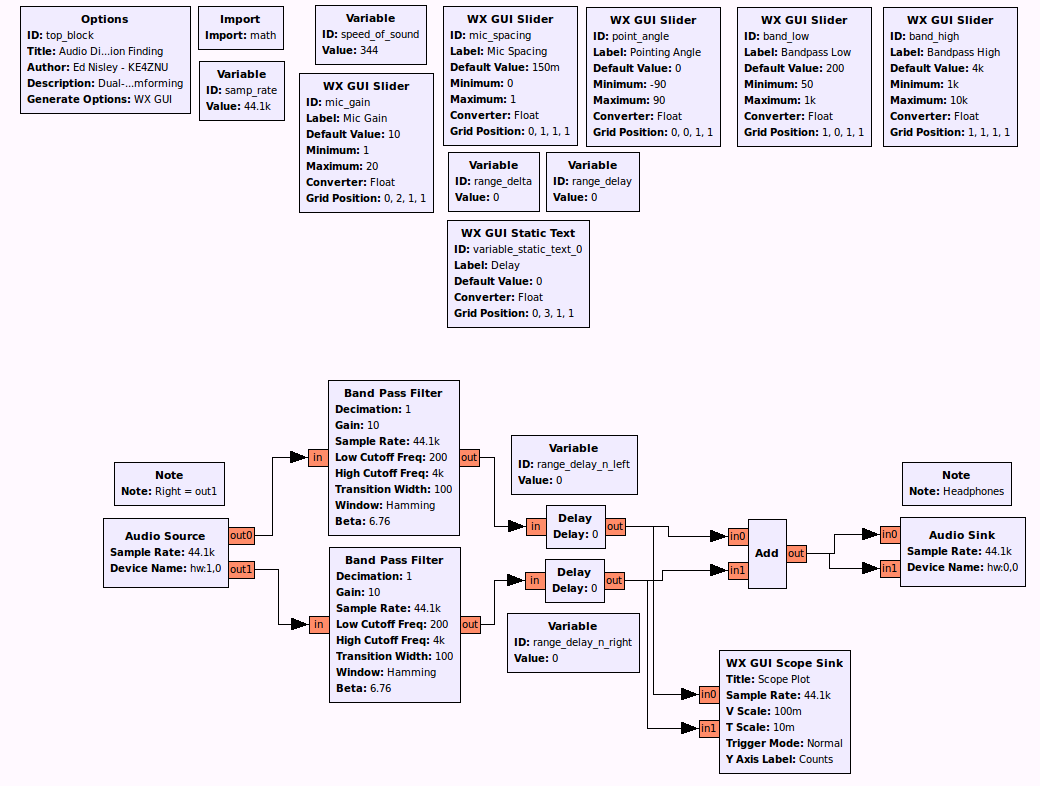
A GNU Radio data flow diagram that lets you set the angle and listen to / watch the results:
Audio Direction Finding.grc
The original doodles show it takes me a while to work around to the answer:
Word from the BPAC meeting says that NYSDOT re-timed the signals on both ends of Burnett Blvd, because of the increased traffic from the closed bridges on Degarmo Rd. Here’s what that looks like from a bicyclist’s perspective; you may want to compare this with othermeasurements in the recent past.
T=0.00 – I’m approaching the light and obviously won’t get through on the current cycle. However, the car in the left lane is just clearing the sensor loop, so we know the sensor has been triggered:
As nearly as I can tell, the green-to-yellow change has decreased from about 7 s to maybe 4 s; that may be influenced by the car position / speed across the loop. NYSDOT definitely hasn’t increased the minimum delay to provide additional time for bicyclists.
The yellow-to-red transition may have decreased from 5 s to 4 s; it definitely hasn’t increased.
T=10.433 – The white car deliberately blew through the yellow and red signals:
T=12.000 – The white car has almost cleared the intersection, 3.567 s after blowing through the red light, and cross traffic in Rt 55 has started to move:
It’s impossible to tell from my position when the Rt 55 traffic saw their green signals, but they started moving 3.5 s from the time the signal in our direction turned red. I’d previously measured that at 1.333 s, so NYSDOT seems to have lengthen the all-red overlap.
T=14.433 – Cross traffic on Rt 55 fills the intersection:
That’s 10.3 s from the Burnett signal turning yellow, which usually happens when we’re just barely into the intersection; we need at least 15 s to reach the far side of all six lanes. Obviously, cross traffic on Rt 55 must notice that we haven’t cleared the intersection when their signals turn green and avoid running over us; that’s legally required, but it’s obvious NYSDOT (still) isn’t helping bicyclists get across the intersection.
The NYSDOT regional office behind my right shoulder has a bike rack. We’ve never seen any bikes in it, so it’s equally obvious NYSDOT doesn’t practice dogfooding. I’ve never been able to invite / persuade / shame anyone from NYSDOT to ride along with us, so they can show me why their design really does “mak[e] our highway systems safe and functional for all users“.
Although microphones intended for conference tables aren’t suitable for inconspicuous hearing aids, they go a long way toward working out algorithms (*). This is a SoundTech CM-1000 USB mic:
SoundTech CM-1000USB microphone
It produces noise-canceled stereo output and a quick test shows impulse sounds produce reasonable left and right responses responses; I can’t vouch for the noise cancelling part.
A click to the right side:
CM-1000USB mic – Right pulse
And to the left:
CM-1000USB mic – Left pulse
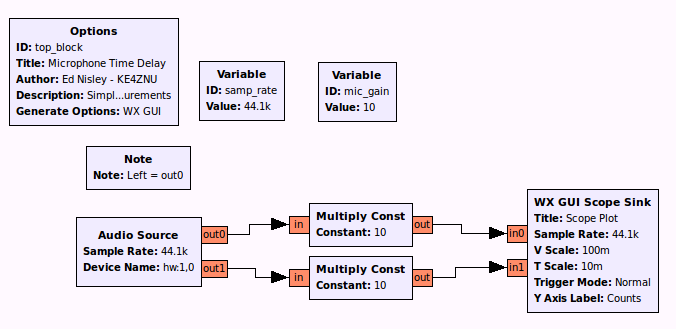
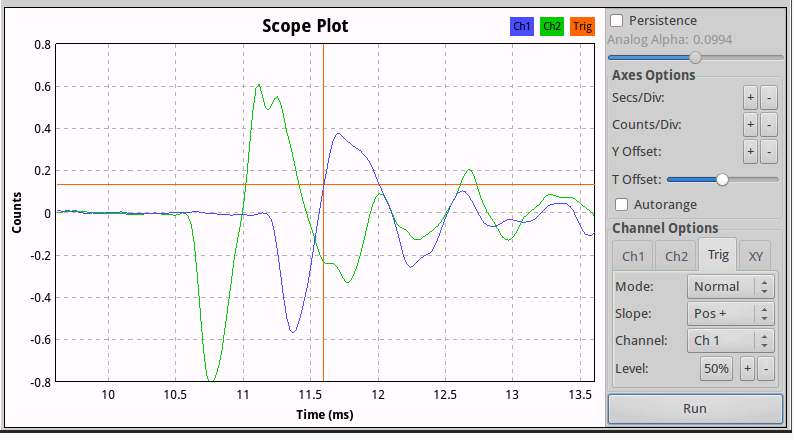
The green trace (Channel 2) is obviously the Right channel, which corresponds to in1 on the Scope Sink block and out1 of the Audio Source in the GNU Radio data flow diagram:
Microphone Time Delay.grc
There’s an irreconciliable clash between 0-index and 1-index numbering in there, but the microphone’s “Left” and “Right” channels appear in the proper places when you look at the mic from the conference room side of the label as shown in the top photo.
Figuring the speed of sound at 344 m/s, that 100 µs delay means the mic capsules sit 34 mm apart, which looks to be about right, as the flat part of the housing under the label spans 22 mm.
That’s a tad skimpy for things like beamforming and direction finding, so I actually bought a set with a separate CM-1000 mic that plugs into the USB mic:
SoundTech CM-1000USB and CM-1000 microphones
The channel layout diagram explains what’s supposed to happen:
Soundtouch CM-1000USB microphone channel layout
The additional mic changes the response, so that the USB unit becomes the Left channel and the analog mic provides the Right channel. I don’t know what happens to the “noise canceling” part of the story.
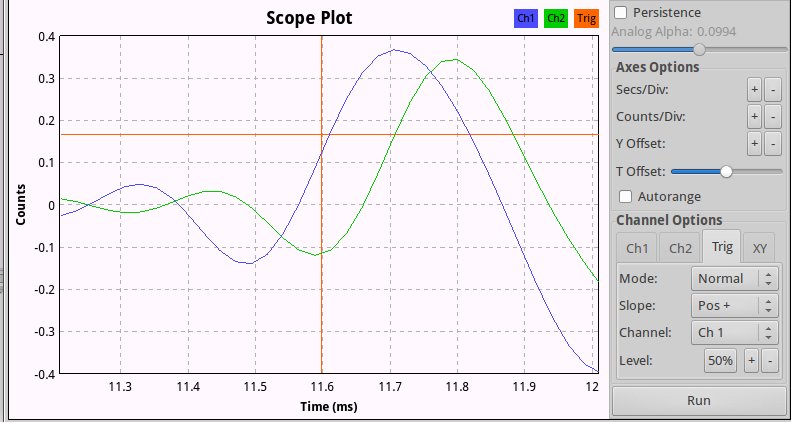
With the mics positioned 200 mm on center, a click to the right side:
SoundTech CM-1000 mics – 200 mm OC – Right pulse
The eyeballometrically precise 600 µs delay corresponds to 206 mm at 344 m/s, which might actually be close: they’re 200 mm on center, but the Right-channel mic is 10 mm smaller and the mic might be half that much further away from the other one. Not that that makes any difference.
(*) And, frankly, slapping a mic on the table won’t bother me much at all…
A somewhat lighter, more rye-tasting loaf than my classic recipe:
Combine dry ingredients in a 4.5-quart mixer bowl:
½ Tbsp dry yeast (1 Tbsp for more boost)
2 Tbsp brown sugar
½ cup dried milk
Stir in:
1-½ cup warm water
Dump more dry ingredients on top, do not mix:
½ cup flax seed meal
1 cup bread flour
1 cup rye flour
2-½ cup whole wheat flour
1 tsp salt
Let the dry ingredients sit on top of the liquid for 15 minutes as the yeast revs up, then run the mixer until the dough ball cleans the bowl sides. Oil the bowl, cover, and let the dough rise for maybe an hour (45 minutes in warm weather / oven).
Form the ball into an ingot, pack it into a non-stick loaf pan, cover loosely with aluminum foil, and let it rise another hour (30 minutes in warm weather / oven) to fill the pan with a nice loaf. I’ve been using a King Authur 8-½ x 4-½ inch non-stick bread pan to good effect.
Bake loaf with the foil on top in a 350 °F oven for 50 minutes. You can set the oven to start at a convenient time, run for an hour at 350 °F from a cold start, and the bread will come out fine. If it’s too durable, try 325 °F.
Drop loaf onto a cooling rack, wait five minutes, slice generous QC sample from one end, apply (peanut) butter, give thanks to the yeast, enjoy.