As part of coaching a student (and his father!) on their incredibly ambitious build-a-plotter-from-scratch project, I suggested stealing using HP’s grit-wheel paper drive, rather than fiddling with guide rods to move either the pen carrier or the entire paper platform. Dremel sanding drums seem about the right size and they had an 8 mm shaft harvested from a defunct printer, so a pair of mounts moves the project along:
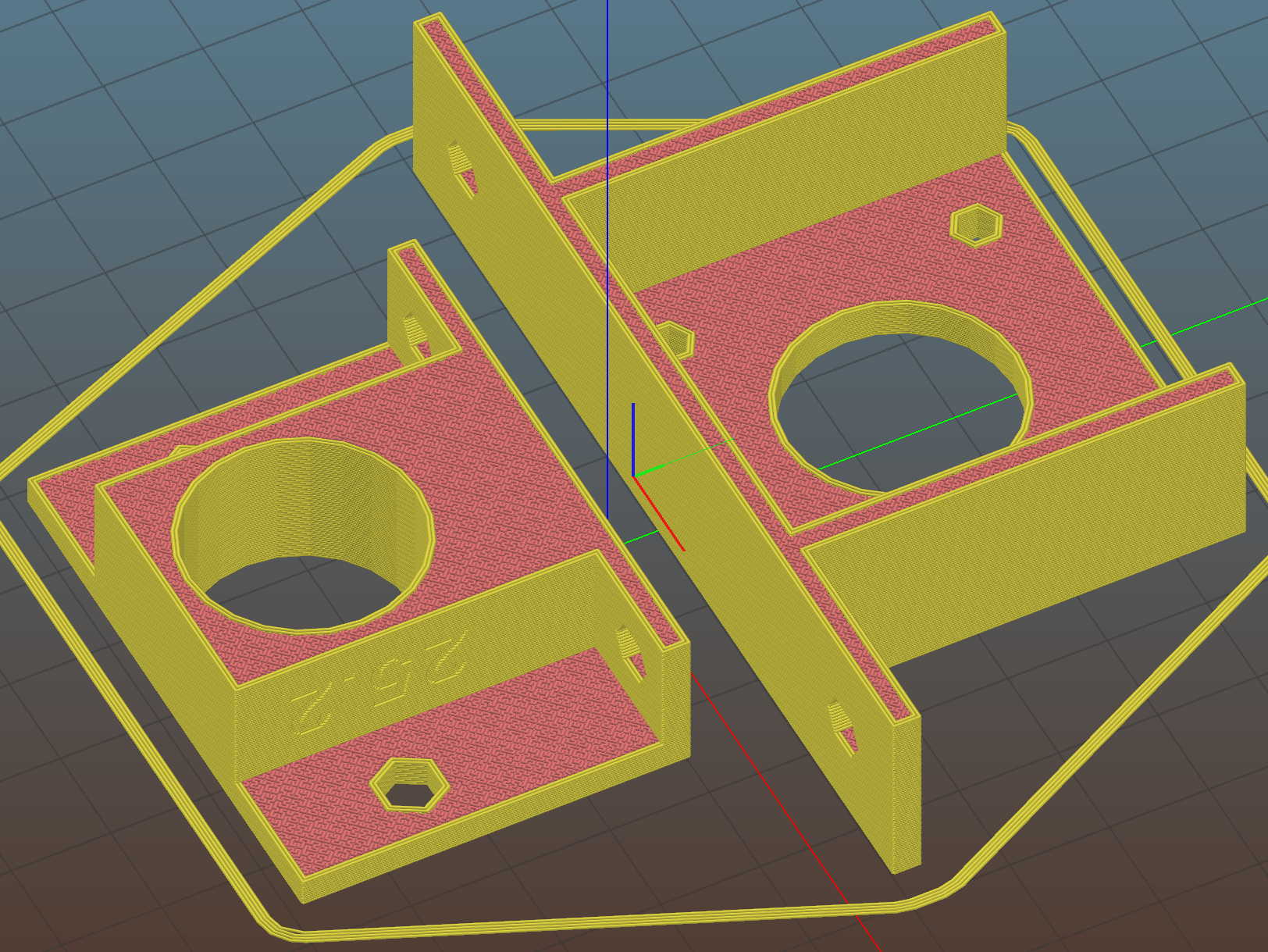
The motor mount code is a hack job from my old NEMA17 mount and the code has a lot not to like. The bearing mount puts the bearing on the proper centerline using brute force copypasta and depends on friction to hold it in place. The two models should be integrated into the same file, the shaft centerline shouldn’t involve the printed thread width, and blah blah blah:

I had him turn the shaft adapter from an aluminum rod in the mini-lathe: he’s hooked.
The OpenSCAD source code as a GitHub Gist:
| // Ball bearing mount | |
| // Ed Nisley KE4ZNU 2017-10-09 | |
| //– Extrusion parameters | |
| ThreadThick = 0.20; | |
| ThreadWidth = 0.40; | |
| HoleWindage = 0.2; // enlarge hole dia by this amount | |
| function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit); | |
| Protrusion = 0.1; // make holes look good and joints intersect properly | |
| //– Useful sizes | |
| inch = 25.4; | |
| Tap10_32 = 0.159 * inch; | |
| Clear10_32 = 0.190 * inch; | |
| Head10_32 = 0.373 * inch; | |
| Head10_32Thick = 0.110 * inch; | |
| Nut10_32Dia = 0.433 * inch; | |
| Nut10_32Thick = 0.130 * inch; | |
| // Bearing sizes | |
| ID = 0; | |
| OD = 1; | |
| LENGTH = 2; | |
| Bearing = [8.0,22.0,7.0]; | |
| ShaftHeight = IntegerMultiple(25.2,ThreadWidth); // arbitrary or copied from motor mount | |
| WallThick = 3.0; | |
| //– Mount Sizes | |
| MountSize = Bearing[OD] + 2*WallThick; | |
| BaseThick = max(WallThick,ShaftHeight – MountSize/2); // baseplate | |
| StandBoltHead = IntegerMultiple(Head10_32,2); // bolt head rounded up | |
| StandBoltClear = 1.25 * StandBoltHead; | |
| StandBoltOC = IntegerMultiple(MountSize + StandBoltClear,2); | |
| StandLength = StandBoltOC + StandBoltClear; | |
| StandThick = StandBoltClear + WallThick; | |
| StandHeight = MountSize + BaseThick; | |
| Cutout = (StandLength – MountSize)/2; | |
| echo(str("Stand Base: ",StandLength," x ",StandThick," x ",BaseThick)); | |
| echo(str("Stand Bolt OC: ",StandBoltOC)); | |
| echo(str("Shaft Height:",ShaftHeight)); | |
| //———————- | |
| // Useful routines | |
| module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes | |
| Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2); | |
| FixDia = Dia / cos(180/Sides); | |
| cylinder(r=(FixDia + HoleWindage)/2, | |
| h=Height, | |
| $fn=Sides); | |
| } | |
| //———————- | |
| // Put it together | |
| module BearingMount() { | |
| difference() { | |
| translate([BaseThick/2,0,StandThick/2]) | |
| cube([StandHeight,StandLength,StandThick],center=true); | |
| translate([0,0,-Protrusion]) | |
| PolyCyl(Bearing[OD],(StandThick + 2*Protrusion)); | |
| for (j=[-1,1]) // cutouts over bolts | |
| translate([-(StandHeight/2 – ShaftHeight + WallThick), | |
| j*(StandLength/2 – Cutout/2 + Protrusion/2), | |
| (WallThick + StandThick/2)]) | |
| cube([StandHeight, | |
| Cutout + Protrusion, | |
| StandThick],center=true); | |
| for (j=[-1,1]) // stand bolt holes – base | |
| translate([(MountSize/2 – Protrusion), | |
| j*StandBoltOC/2, | |
| WallThick + StandBoltClear/2]) | |
| rotate([0,90,0]) | |
| rotate(180/6) | |
| PolyCyl(Clear10_32,BaseThick + 2*Protrusion,6); | |
| for (j=[-1,1]) // stand bolt holes – back | |
| translate([0,j*StandBoltOC/2,-Protrusion]) | |
| rotate(180/6) | |
| PolyCyl(Clear10_32,StandThick + 2*Protrusion,6); | |
| translate([0,-(MountSize/2 – ThreadWidth/2),(StandThick – WallThick)/2 + WallThick]) | |
| rotate([90,180,0]) | |
| linear_extrude(ThreadWidth,convexity=10) | |
| text(text=str(ShaftHeight),size=6,spacing=1.20,font="Arial",halign="center",valign="center"); | |
| } | |
| } | |
| //———————- | |
| // Build it | |
| BearingMount(); | |
| // NEMA 17 stepper mount | |
| // Ed Nisley KE4ZNU August 2011 | |
| // Tweaked & thinned 2017-10-09 | |
| //– Extrusion parameters | |
| ThreadThick = 0.25; | |
| ThreadWidth = 0.4; | |
| HoleWindage = 0.3; // enlarge hole dia by this amount | |
| function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit); | |
| Protrusion = 0.1; // make holes look good and joints intersect properly | |
| //– Useful sizes | |
| inch = 25.4; | |
| Tap10_32 = 0.159 * inch; | |
| Clear10_32 = 0.190 * inch; | |
| Head10_32 = 0.373 * inch; | |
| Head10_32Thick = 0.110 * inch; | |
| Nut10_32Dia = 0.433 * inch; | |
| Nut10_32Thick = 0.130 * inch; | |
| NEMA17_ShaftDia = 5.0; | |
| NEMA17_ShaftLength = 24.0; | |
| NEMA17_PilotDia = 0.866 * inch; | |
| NEMA17_PilotLength = 0.080 * inch; | |
| NEMA17_BCD = 1.725 * inch; | |
| NEMA17_BoltDia = 3.5; | |
| NEMA17_BoltOC = 1.220 * inch; | |
| //– Mount Sizes | |
| MountWidth = IntegerMultiple(NEMA17_BCD,ThreadWidth); // use BCD for motor clearance | |
| MountThick = IntegerMultiple(4.0,ThreadThick); // for stiffness | |
| MountBoltDia = 3.0; | |
| StandThick = 3.0; // baseplate | |
| StrutThick = IntegerMultiple(3.0,ThreadWidth); // sides holding motor mount | |
| UprightLength = MountWidth + 2*StrutThick; | |
| StandBoltHead = IntegerMultiple(Head10_32,5); // bolt head rounded up | |
| StandBoltOC = IntegerMultiple(UprightLength + 2*StandBoltHead,5); | |
| StandLength = StandBoltOC + 2*StandBoltHead; | |
| StandWidth = 2*StandBoltHead; | |
| StandBoltClear = (StandLength – UprightLength)/2; // flat around bolt head | |
| MotorRecess = StandWidth – MountThick; | |
| ShaftHeight = IntegerMultiple(StandThick + MountWidth/2,ThreadWidth); | |
| echo(str("Stand Base: ",StandLength," x ",StandWidth," x ",StandThick)); | |
| echo(str("Stand Bolt OC: ",StandBoltOC)); | |
| echo(str("Shaft Height:",ShaftHeight)); | |
| echo(str("Strut Thick: ",StrutThick)); | |
| //———————- | |
| // Useful routines | |
| module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes | |
| Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2); | |
| FixDia = Dia / cos(180/Sides); | |
| cylinder(r=(FixDia + HoleWindage)/2, | |
| h=Height, | |
| $fn=Sides); | |
| } | |
| //———————- | |
| // Model | |
| module MotorMount() { | |
| difference() { | |
| translate([StandThick/2,0,StandWidth/2]) | |
| cube([(MountWidth + StandThick),StandLength,StandWidth],center=true); | |
| translate([-Protrusion/2,0,StandWidth – (MotorRecess – Protrusion)/2]) | |
| cube([(MountWidth + Protrusion),MountWidth,(MotorRecess + Protrusion)],center=true); | |
| translate([0,0,-Protrusion]) // pilot hole | |
| PolyCyl(NEMA17_PilotDia,(MountThick + 2*Protrusion)); | |
| for (i=[-1,1]) // motor bolt holes | |
| for (j=[-1,1]) | |
| translate([i*NEMA17_BoltOC/2,j*NEMA17_BoltOC/2,-Protrusion]) | |
| PolyCyl(MountBoltDia,(MountThick + 2*Protrusion),6); | |
| for (j=[-1,1]) // cutouts over bolts | |
| translate([-Protrusion/2, | |
| j*((StandLength – StandBoltClear)/2 + Protrusion/2), | |
| StandWidth/2]) | |
| cube([(MountWidth + Protrusion), | |
| (StandBoltClear + Protrusion), | |
| (StandWidth + 2*Protrusion)],center=true); | |
| for (j=[-1,1]) // stand bolt holes | |
| translate([(MountWidth/2 – Protrusion),j*StandBoltOC/2,StandWidth/2]) | |
| rotate([0,90,0]) | |
| rotate(180/6) | |
| PolyCyl(Clear10_32,StandThick + 2*Protrusion,6); | |
| translate([0,-(UprightLength/2 – ThreadWidth/2),StandWidth/2]) | |
| rotate([90,180,0]) | |
| linear_extrude(ThreadWidth,convexity=10) | |
| text(text=str(ShaftHeight),size=6,spacing=1.20,font="Arial",halign="center",valign="center"); | |
| } | |
| } | |
| //———————- | |
| // Build it | |
| MotorMount(); | |

Comments
4 responses to “NEMA17 Motor and Bearing Mounts”
Those grit wheels did work well. I was admiring them on a few antiques that I have (HP2225x series) because they are just too cute to get rid of. I happen to have parallel, serial, AND GPIB versions that are all like new. They even still sell the cartridges. I have personally never purchased an inkjet printer in all the years they have been around. Several dot matrix printers and one 5MP laser printer though. Laser printer still works quite well from 1993 and only on its 2nd or possibly 3rd toner cartridge. I just refuse to tear these guys down for parts.
Image chosen for scale showing human hands:
You are very close to the spirit of the thing … [grin]
[…] recommissioning the lathe tailstock, I made some bushings to adapt Dremel sanding drums bands to an 8 mm shaft (in imitation of the grit drive wheels on the HP […]
[…] stepper is a random NEMA 17 from the heap in a mount intended for a DIY plotter. I adjusted the tiny trimpots on all the boards for 400 mA peak = 250 mA RMS into the windings, […]