Pop Quiz!
What’s the difference between the winding on this toroid:

And the winding on this one:
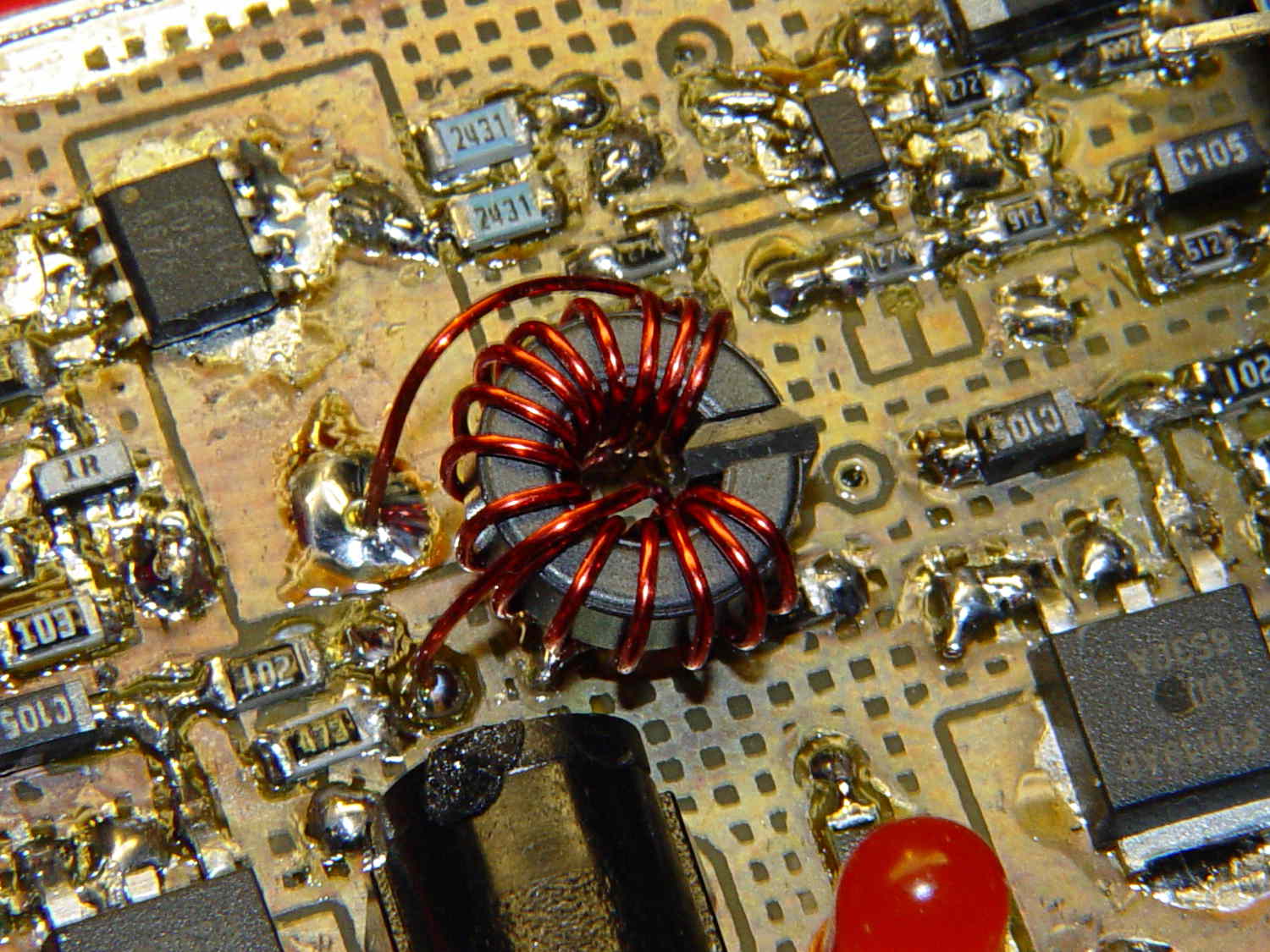
Very good!
In the first picture, the top lead goes down the hole. In the second picture, the bottom lead goes down the hole.
Bonus question 1: Why is this important?
The winding’s chirality determines the direction of the magnetic field in the toroid by the right hand rule: grab the wire with your right hand, with your thumb pointed in the direction of (conventional) current flow, then your fingers wrap around the wire in the direction of the induced field.
The Hall effect sensor snuggled in the toroid’s gap produces a bipolar output that depends on both the magnetic field’s direction and intensity, so reversing the field direction changes the phase of the sensor output: an increasing field can either increase or decrease the sensor’s output.
Bonus question 2: For a given sensor orientation, what’s the probability of winding the toroid correctly on the first try?
Yup: zero. Wound it backwards…
It’s not practical to reverse the sensor orientation, the leads weren’t quite long enough to swap, and turning the toroid upside-down is effectively the same as swapping the too-short leads.
The size of the solder blob at the end of the top lead tells you everything you need to know about the sequence of the picvtures.

Comments
7 responses to “Hall Effect Sensor: Toroid Winding Direction”
I have noticed that given two possible outcomes, there is a 70% chance of getting it wrong…
Obviously, the Force is stronger with you… [sigh]
Thanks for the word of the day – chirality. So, if your coil were not symmetric this would not have worked? I have noticed that symmetry has an axis. Example: A CW propeller if mirrored about its axial plane is still a CW prop but, if you mirror it along the orthogonal plane to the axial it is a now a CCW prop.
I was designing a machine in which I’d wanted to have a R & L hand components. But, when I mirrored one of the parts – no matter which direction – features were not lining up correctly – the part was asymmetric? and thus chiral?
I’m confusing myself — :-?
The ferrite toroid is symmetric around its central axis, but the winding isn’t: it can be either left or right handed. The magnetic flux direction depends on the winding’s handedness and the only way to flip that is to interchange the leads.
An object is chiral if you can’t superimpose it on its mirror image, so it must be both asymmetric and have “handedness”. Looking at the toroid winding, the handedness comes from the wire going down the hole on the left side or the right side of the core’s central axis.
For your parts, you may have not gotten the mirror plane quite right or maybe you used two planes: one left-to-right and the other top-to-bottom. If you’re not careful, you can undo one reflection with another, making the result identical to the original part, just spun around a couple of axes.
In my case, having the wrong sign on the current loop feedback didn’t work at all…
Murphy’s law has lots of applications. [sigh] I was changing radiator hoses in Julie’s 1998 Ranger when I remembered the new thermostat I had purchased a few years ago. After I got the T-stat housing out, I realized that the replacement didn’t have the air relief check-valve the engine needs. So, another trip to town for the right one. Now all I have to do is to get the new one installed in the right direction, giving another chance to screw it up…
Pictures! You need pictures! Lots and lots of pictures!
Works for me, but the pictures I really need are the ones I didn’t take because the layout was so obvious I couldn’t possibly get it wrong.
I have the Chilton service manual, so that helps. There’s a good article on doing the swap, once I get the pictures to load.
Lots-o-pics saved my tail when I did an overhaul on Julie’s Kitchenaid stand mixer. (Note: it’s very repairable with a good supply of fix-it parts available.) I knew it would be a cast-metal bear and She Who Must Be Happy wouldn’t be if I screwed up. When I get the round tuit, I’ll have a working linux box in the work room in the barn/shop. Lots of big pictures! (FYI, doing the cap plague fix bought me about 8 months of success before something else died in the older Princeton monitor. I can override the weird colors, but the monitor processor/driver seems to have bit rot. Sigh.)
I’ve been burned by the “too obvious to screw up” situation. I (usually) figure it out, Eventually.