Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
The shaft position and motor RPM sensors require +5 VDC, the LED strip lights run on +12 VDC, and the yet-to-be-built needle lights in the endcap probably need an entirely different supply. After a bit of doodling, all that, plus a power button conductor, fits into nine conductors:
K – +5 VDC for sensors
Bn – common for sensors
R – RPM sensor output
O – Shaft position sensor output
Y – Power button
G – +12 VDC for LED strips
Bl – common for strips
V – + supply for needle lights
W – common for lights
That’s fortunate, as I have a box of pre-built RS-232 cables. The nine color-coded 24 AWG (more or less) conductors seem a bit scanty for LED strip light currents, but they’ll suffice for now.
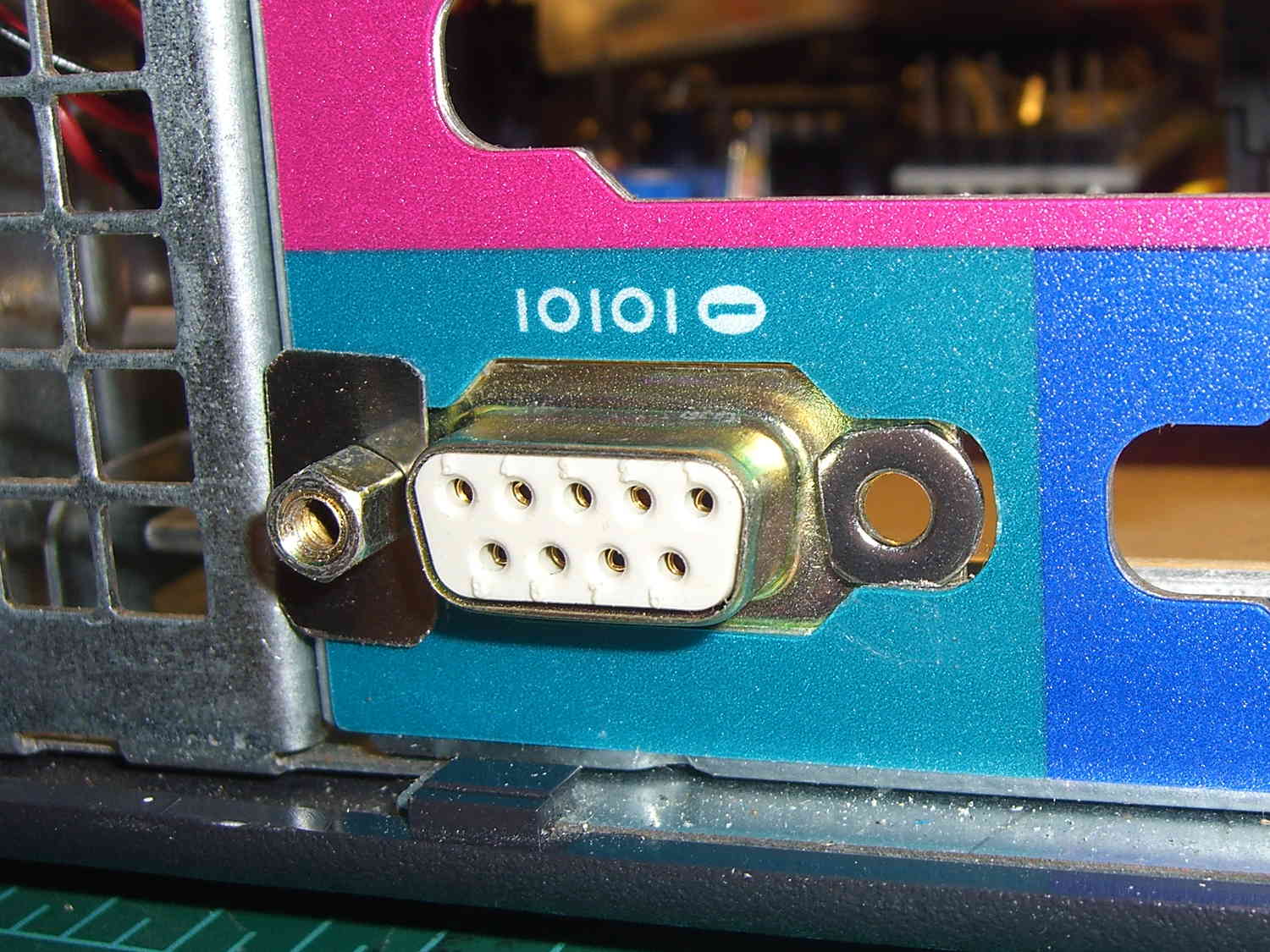
Everything terminates in a hideous shrub down by the motor pulley, with cable ties holding the wires away from the action:
A pair of 4-40 washers, filed to fit inside the chassis cutout and away from the shell, keep the connector from rotating / sliding; the dimensions aren’t conducive to a 3D printed widget. The flat metal strips hold the connector in place, with the mounting screws threaded into 4-40 nuts behind the connector.
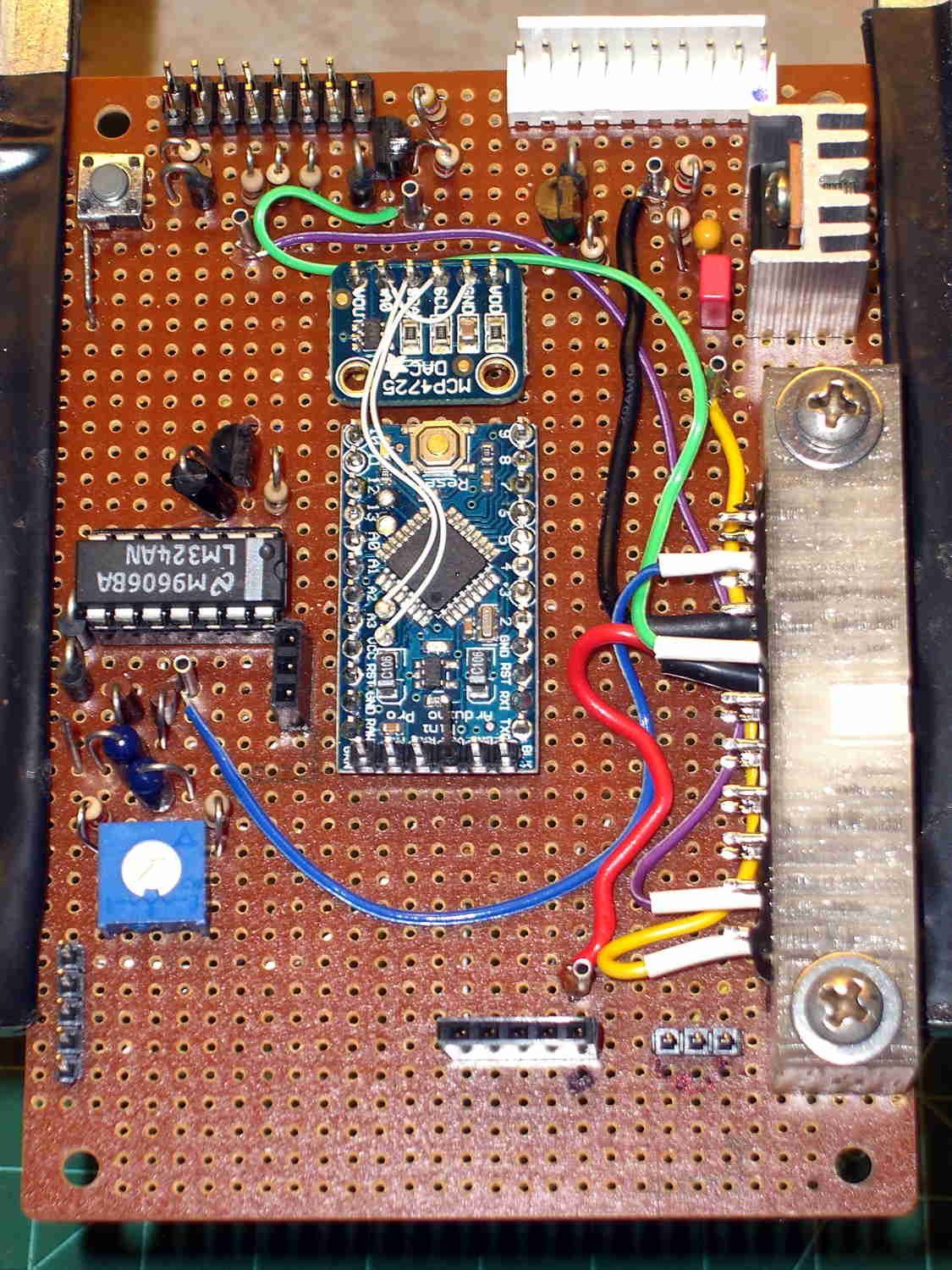
The top row of pins goes to a header (a bit fuzzy, near the bottom of the image) on the Low Voltage Interface board, where the sensor inputs go directly to the Arduino Pro Mini and the power connections to the ATX connector:
Low Voltage Interface Board – top view
The LED power connections on the bottom row go to pins on an ATX wiring harness that used to send juice to the various disk drives.
I’m not real happy with that lashup, but … more pondering is in order. I suspect I’ll need a few more conductors for other things on the sewing machine, so a larger cable may terminate at a DB25 connector in the cutout just above this one.
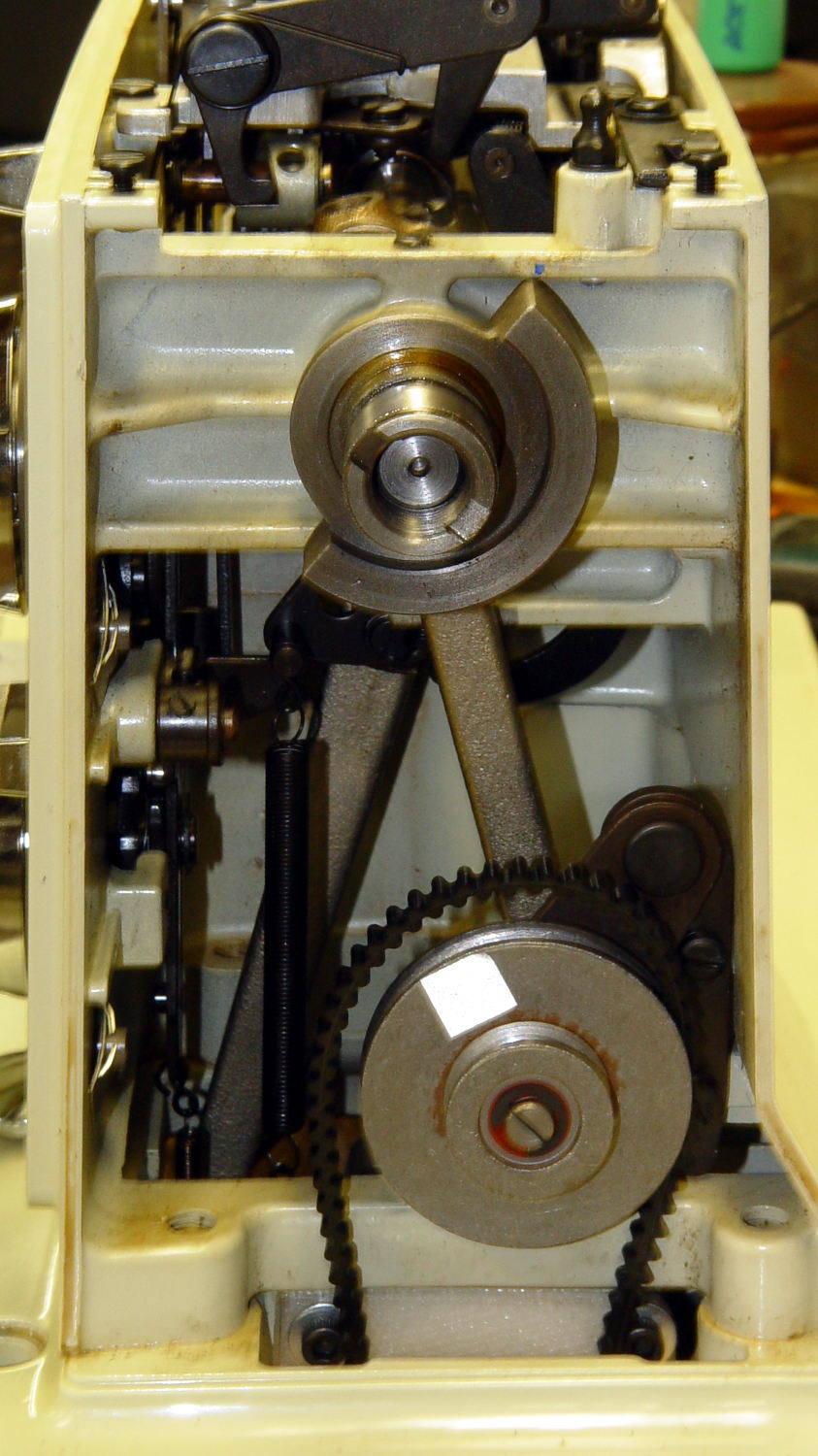
In order to stop the sewing machine with the needle either up or down, the controller must know the angular position of the main shaft. Fortunately, the shaft has a counterweight in a not-too-inconvenient location behind the handwheel:
Kenmore 158 – main shaft counterweight
The needle is fully down with the shaft in that position. I originally thought about putting a pair of sensors adjacent to the lower edge, but because the motor can rotate the shaft only counterclockwise (as seen from this end), watching a single sensor tells you everything you need to know:
Falling edge: needle at top
Rising edge: needle at bottom
N.B.: Although you can rotate the shaft backwards by hand, the controller needs to know the position only when stopping.
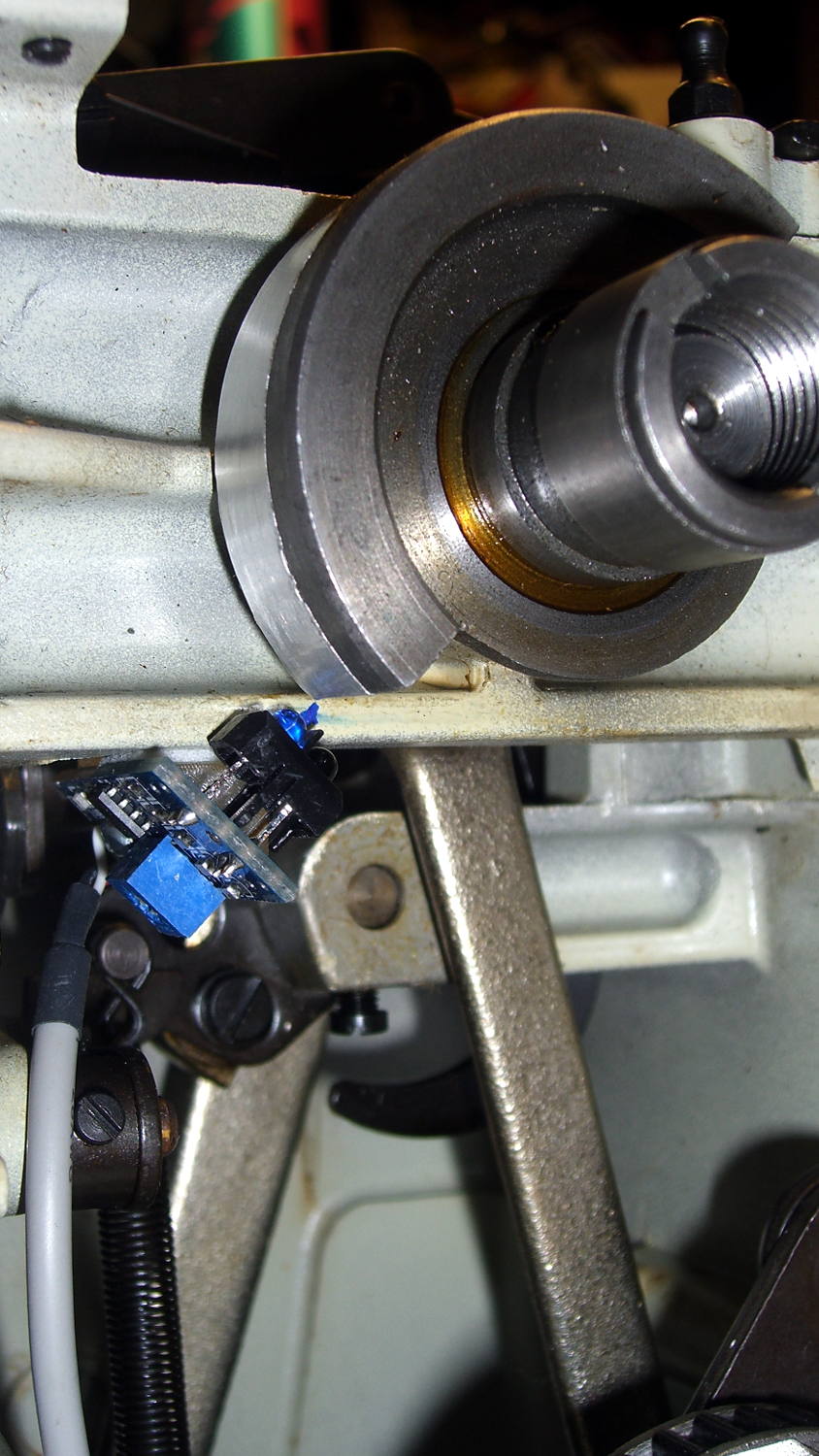
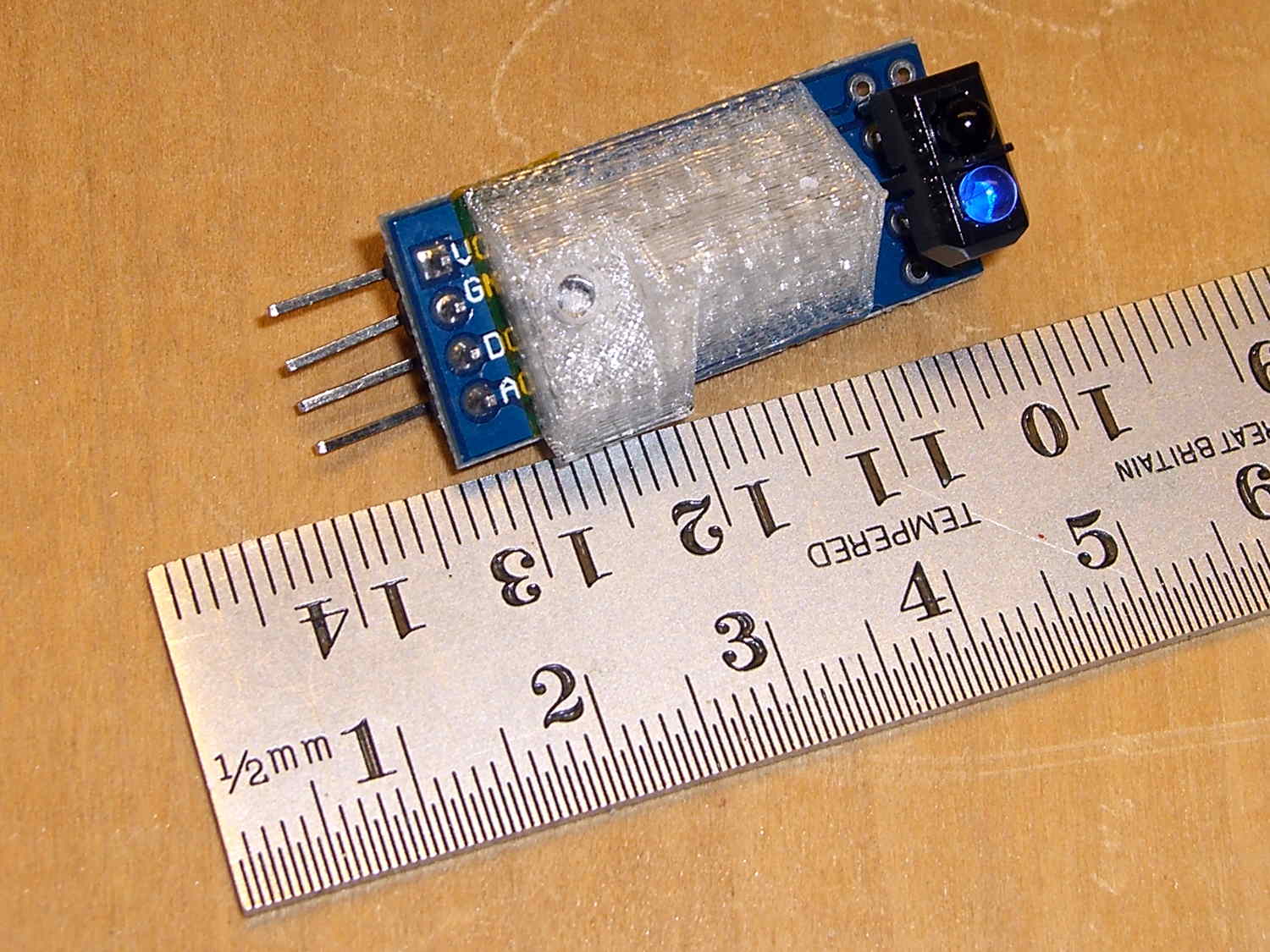
Some fiddling around showed that a TCRT5000 sensor board would fit neatly below the frame cross flange at exactly the right spot:
Shaft position sensor – in place
The counterweight now sports a strip of stainless steel tape (normally used on HVAC ductwork) burnished to a high shine:
The tape tucks around the counterweight to keep the wind out of its hair:
Kenmore 158 Shaft Counterweight – steel tape ends
The handwheel spins on that smooth ring near the end of the shaft and covers the outer half of the counterweight, so the tape brightens up the only part of the counterweight that the sensor can see.
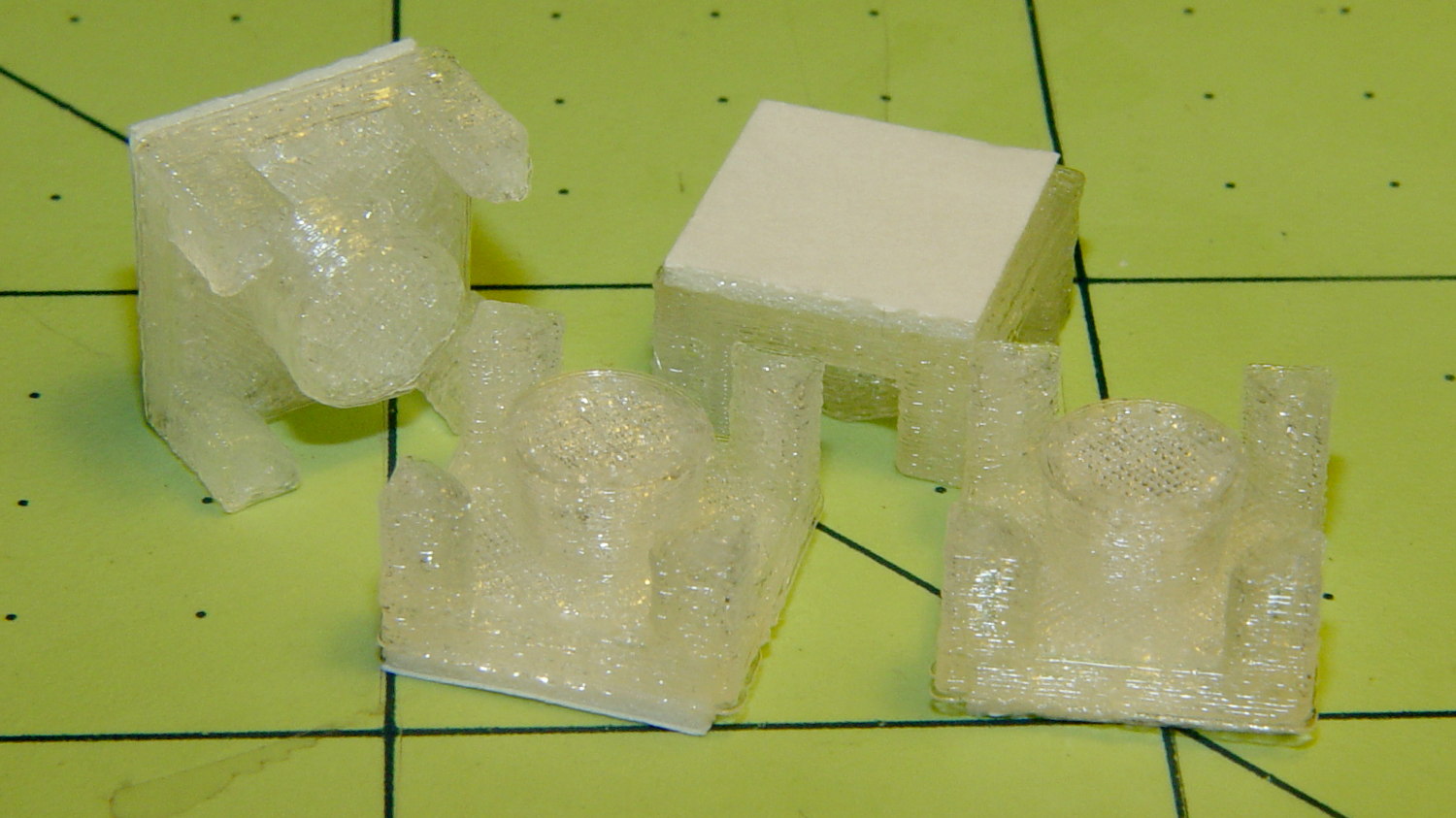
The sensor mounts on a fiddly bit of plastic that’s ideally suited for 3D printing:
Shaft Position Sensor Mount – left
The rectangular recess fits around the protruding trimpot leads, a screw in the hole fastens the sensor, the flange on the top fits against the inside edge of the frame flange to position the sensor head axially along the shaft, and the cutout to the left rear clears the whirling crank bearing on the shaft.
It looked good on the bench:
Shaft sensor mount – trial fit
Rather than mess around with more connectors, I removed the pins and soldered a hank of CD-ROM audio cable (remember CD-ROMs?) directly into the top three holes.
After scrubulating the bottom of the frame flange with denatured alcohol, a square of double-stick foam tape holds the mount to the frame, eyeballometrically aligned to the proper position:
Kenmore 158 Shaft position sensor – end view
That may be slightly too close to the counterweight, as the ideal distance is about 2 mm. The source code can add a shim that moves the mounting plane straight down, allowing the whole thing to move slightly to the left: increase the clearance while maintaining the same angular position. The next version will have a 1 mm BaseShim and we’ll see how that goes.
You could mirror the mount to put another sensor at the quadrature position on the right side of the counterweight.
It’s getting closer to becoming a simple matter of software…
The OpenSCAD source code:
// Shaft Position Sensor Mount
// Ed Nisley - KE4ZNU - October 2014
Layout = "Show";
//- Extrusion parameters must match reality!
ThreadThick = 0.20;
ThreadWidth = 0.40;
HoleWindage = 0.2; // extra clearance
Protrusion = 0.1; // make holes end cleanly
AlignPinOD = 1.70; // assembly alignment pins: filament dia
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
//----------------------
// Dimensions
SensorWidth = 14.0; // sensor PCB width
SensorLength = 21.0; // ... contact patch length
NumSensors = 1;
SensorScrewOffset = 5.0; // ... mounting hole to frame edge
PotLeads = [5.0,8.0,1.0]; // trimpot lead recess
PotOffset = [-1.5,8.5,0];
SensorScrewHeadOD = 6.0; // ... mounting screw head dia
SensorScrewTap = 2.25; // ... screw tap diameter
SensorScrewLength = 4.0; // ... screw length inside block
BaseShim = 1.0; // additional height to align sensors
BaseAngle = 45; // downward from horizontal
BaseSensors = NumSensors*SensorWidth; // length along slanted top
BaseLength = BaseSensors*cos(BaseAngle);
BaseHeight = BaseSensors*sin(BaseAngle);
echo(str("Angle: ",BaseAngle," Height: ",BaseHeight," Length: ",BaseLength));
FrameWidth = 13.0; // machine frame width
LipHeight = 3.0; // locates part on frame to position sensors
LipWidth = IntegerMultiple(2.0,ThreadWidth);
Block = [BaseLength,
(FrameWidth + SensorScrewOffset + SensorScrewHeadOD/2),
(BaseHeight + BaseShim + LipHeight)];
echo(str("Block size: ",Block));
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
RangeX = floor(100 / Space);
RangeY = floor(125 / Space);
for (x=[-RangeX:RangeX])
for (y=[-RangeY:RangeY])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//-- Build the sensor mount
module SensorMount() {
difference() {
translate([0,(FrameWidth - Block[1]),0])
cube(Block);
translate([-Block[0],0,(Block[2] - LipHeight)]) // machine frame
cube([3*Block[0],(FrameWidth + Protrusion),Block[2]]);
translate([0,-Block[1]/2,0]) // sensor angle
rotate([0,(90 - BaseAngle),0])
cube(2*Block);
translate([-SensorScrewLength/cos(90 - BaseAngle),-(2*Block[1] + LipWidth),0])
rotate([0,-BaseAngle,0]) // remove all but lip on crank side
cube(2*Block);
for (i=[0:(NumSensors - 1)]) // screw hole
rotate([0,(-BaseAngle),0])
translate([(SensorWidth/2 + i*SensorWidth),-SensorScrewOffset,-Protrusion])
PolyCyl(SensorScrewTap,(SensorScrewLength + 2*Protrusion),6);
for (i=[0:(NumSensors - 1)]) // pot lead recess
rotate([0,(-BaseAngle),0])
translate(PotOffset + [i*SensorWidth + SensorWidth/2 - PotLeads[0]/2,
-(SensorScrewOffset + PotLeads[1]/2),
-Protrusion])
cube(PotLeads + [0,0,Protrusion]);
}
}
//----------------------
// Build it
ShowPegGrid();
if (Layout == "Show")
SensorMount();
if (Layout == "Build")
translate([-SensorWidth,0,0])
rotate([0,(90 - BaseAngle),0])
SensorMount();
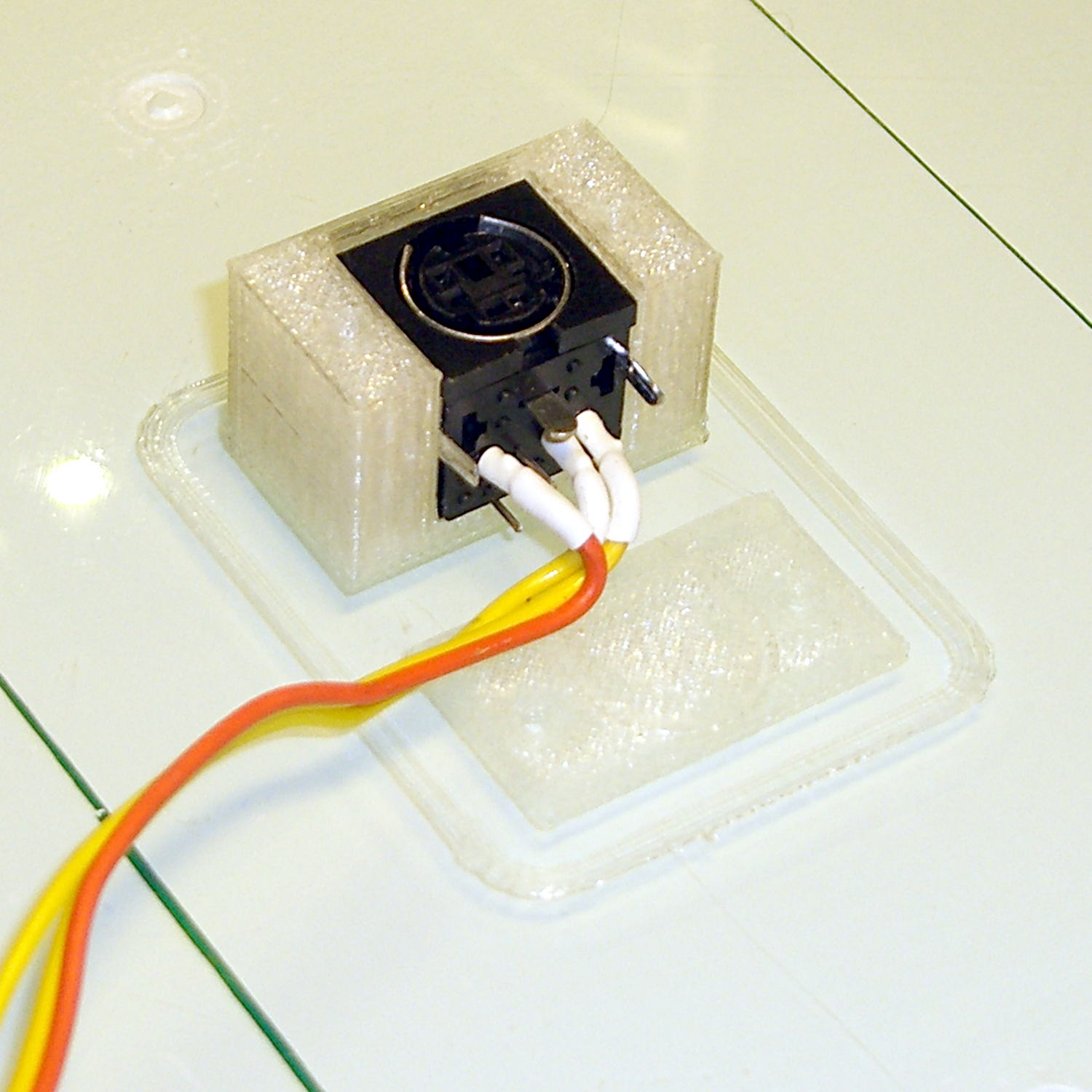
Built back in 2004, the Dell GX270 PC had PS/2 keyboard and mouse ports on its back panel, so I put a PS/2 plug on the cable from the Hall effect sensor in the foot pedal. Although the original sockets mounted on a complex system board structure that I can’t repurpose, it’s easy enough to conjure up a mount for a single socket on the back panel:
PS2 Socket Mount
A quick fit check verified the dimensions:
PS2 Connector mount – trial fit on platform
Astonishingly, the socket slid firmly into its slot. I love it when that happens on the first try!
The flat plate in front of the mount snaps into the chassis cutout to locate the 2-56 screw hole positions:
PS2 Mount – drill guide
The screws thread directly into the mount, with the holes tapped for 2-56. PLA isn’t all that strong, but there’s enough meat to hold the mount firmly enough for my simple purposes.
And it looks pretty good, in a post-apocalyptic missing-windows sort of way:
PS2 Connector mount – in place
That was easy…
The OpenSCAD source code:
// PS/2 Socket Mount
// Ed Nisley - KE4ZNU - October 2014
Layout = "Build"; // Build Socket Guide
//- Extrusion parameters must match reality!
ThreadThick = 0.20;
ThreadWidth = 0.40;
HoleWindage = 0.2; // extra clearance
Protrusion = 0.1; // make holes end cleanly
AlignPinOD = 1.70; // assembly alignment pins: filament dia
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
//----------------------
// Dimensions
Socket = [14.1,13.3,13.0]; // PS/2 socket outline, minus tabs & wires on bottom
Flange = 6.0;
WallThick = IntegerMultiple(2.0,ThreadWidth);
Mount = Socket + [2*Flange,WallThick,WallThick];
ScrewTap = 1.90; // 2-56 tap for machine screws
ScrewOC = 19.0;
echo(str("Screw OC: ",ScrewOC));
ChassisHole = [13.0,13.0,1.0];
GuideLayers = IntegerMultiple(0.5,ThreadThick);
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
RangeX = floor(100 / Space);
RangeY = floor(125 / Space);
for (x=[-RangeX:RangeX])
for (y=[-RangeY:RangeY])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//-- Build the mount
module SocketMount() {
difference() {
translate([0,Mount[1]/2,Mount[2]/2])
cube(Mount,center=true);
translate([0,Socket[1]/2,Socket[2]/2])
cube(Socket + [0,Protrusion,Protrusion],center=true);
for (i=[-1,1]) // holes centered on socket, not mount
translate([i*ScrewOC/2,-Protrusion,Socket[2]/2])
rotate([-90,0,0])
rotate(180/6)
PolyCyl(ScrewTap,Mount[1] + 2*Protrusion,6);
}
}
//-- Totally ad-hoc drill guide to center holes on PS/2 cutout
module DrillGuide() {
union() {
intersection() {
translate([0,0,GuideLayers])
cube([2*Mount[0],2*Mount[1],2*GuideLayers],center=true);
translate([0,-Socket[2]/2,Mount[1]])
rotate([-90,0,0])
SocketMount();
}
translate([0,0,Protrusion])
linear_extrude(height=(3*GuideLayers - Protrusion)) {
circle(d=ChassisHole[0],$fn=8*4);
translate([-ChassisHole[0]/2,0])
square([ChassisHole[0],(ChassisHole[1] - ChassisHole[0]/2)],center=false);
}
}
}
//----------------------
// Build it
ShowPegGrid();
if (Layout == "Socket")
SocketMount();
if (Layout == "Guide")
DrillGuide();
if (Layout == "Build") {
translate([0,-Mount[2],0])
DrillGuide();
translate([0,0,Mount[1]])
rotate([-90,0,0])
SocketMount();
}
It Has Been Decided (in that place where what is decided must be) to allow a single hole in the sewing machine’s front panel:
Kenmore 158 – Front LED strip – wire routing
The hole barely passes the 2 mm coaxial cable I’m misusing for the LED strips and is located where it:
Clears the machine’s metal frame to the upper left
Isn’t blocked by the knob’s mounting bracket to the lower right
Doesn’t snag the knob’s cam followers all over the insides
Lines up directly below the orange dot for pretty
The first three of those happen behind the front panel, inside the frame, where you (well, I) can neither see nor measure the locations. I used a large outside caliper to get a feel for where the hole could possibly fit, then got it right on the first try!
On the rear panel, it turns out that the presser foot lever doesn’t quite touch the top of its slot in the frame, so the cable for those LED strips can sneak through:
Kenmore 158 – Rear LED strips – wire routing
Just inside that slot, the cable turns right, passes into the endcap, then goes upward to re-emerge at the top, inside the channel used for the old 120 VAC zip cord that powered the incandescent bulb in the endcap.
I had some square cable clips lying around, so I used them, but the (yet to be designed) round versions will look better.
The grody frame tells you this is the crash test dummy machine I’m using to verify things before installing them in Mary’s machine.
The improved cable routing required different hole positions in the LED strip mounts:
Strip Light Mount – Drilled cable routing
The internal wire route follows the original 120 VAC zip cord’s route from the bottom of the machine to the endcap (on the left), with the new branch for the front LEDs curving over the main shaft:
Kenmore 158 – LED strips – internal wire routing
The four-conductor ribbon cable also carries the supply voltage for the yet-to-be-built high intensity LED emitters in the end cap that will replace the 10 mm LEDs, with the ends terminated under the clamp in the middle. Those old steel wire clamps seem grossly oversized for the job, but that’s OK with me.
The ribbon cable eases past that whirling crank arm, then passes through the frame to the outside cover under the handwheel, where it just barely clears the drive belts. A few zip ties hold it out of the way.
The OpenSCAD source code offsets the wiring holes by 0.5 mm from the ends of the LED strips for easier wire bending, but is otherwise pretty much the same as before:
// LED Strip Lighting Brackets for Kenmore Model 158 Sewing Machine
// Ed Nisley - KE4ZNU - March 2014
// October 2014 - tweak endcap length & channel position
Layout = "Build"; // Build Show Channels Strip
//- Extrusion parameters must match reality!
// Print with 2 shells and 3 solid layers
ThreadThick = 0.20;
ThreadWidth = 0.40;
HoleWindage = 0.2; // extra clearance
Protrusion = 0.1; // make holes end cleanly
AlignPinOD = 1.70; // assembly alignment pins: filament dia
inch = 25.4;
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
//----------------------
// Dimensions
LEDSegment = [25.0,10.0,3.0]; // size of each LED segment
SEGLENGTH = 0;
SEGWIDTH = 1;
SEGHEIGHT = 2;
WireChannel = 3.0; // wire routing channel diameter
StripHeight = 12.0; // sticky tape width
DefaultLayout = [1,2,"Wire","NoWire"];
NUMSEGS = 0;
NUMSTRIPS = 1;
WIRELEFT = 2;
WIRERIGHT = 3;
EndCapSides = 8*4; // endcap smoothness
EndCapShim = 0.5; // additional space for easier wire bending
function EndCapSize(Layout) = [(2*WireChannel + EndCapShim),Layout[NUMSTRIPS]*LEDSegment[SEGWIDTH],StripHeight];
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
RangeX = floor(100 / Space);
RangeY = floor(125 / Space);
for (x=[-RangeX:RangeX])
for (y=[-RangeY:RangeY])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//-- The negative space used to thread wires into the endcap
module MakeWireChannel(Layout = DefaultLayout,Which = "Left") {
EndCap = EndCapSize(Layout); // radii of end cap spheroid
HalfSpace = EndCap[0] * ((Which == "Left") ? 1 : -1);
render(convexity=2)
translate([0,LEDSegment[SEGWIDTH]/2,0])
intersection() {
union() {
cube([2*WireChannel,WireChannel,EndCap[2]],center=true);
translate([-2*EndCap[0],0,EndCap[2]/2])
rotate([0,90,0]) rotate(180/6)
PolyCyl(WireChannel,4*EndCap[0],6);
}
translate([HalfSpace,0,(EndCap[2] - Protrusion)]) {
cube(2*EndCap,center=true);
}
}
}
//-- The whole strip, minus wiring channels
module MakeStrip(Layout = DefaultLayout) {
EndCap = EndCapSize(Layout); // radii of end cap spheroid
BarLength = Layout[NUMSEGS] * LEDSegment[SEGLENGTH]; // central bar length
echo(str("Strip OAL: ",BarLength + 2*EndCap[SEGLENGTH]));
hull()
difference() {
for (x = [-1,1]) // endcaps as spheroids
translate([x*BarLength/2,0,0])
resize(2*EndCap) rotate([0,90,0]) sphere(1.0,$fn=EndCapSides);
translate([0,0,-EndCap[2]])
cube([2*BarLength,3*EndCap[1],2*EndCap[2]],center=true);
translate([0,-EndCap[1],0])
cube([2*BarLength,2*EndCap[1],3*EndCap[2]],center=true);
}
}
//-- Cut wiring channels out of strip
module MakeMount(Layout = DefaultLayout) {
BarLength = Layout[NUMSEGS] * LEDSegment[SEGLENGTH];
difference() {
MakeStrip(Layout);
if (Layout[WIRELEFT] == "Wire")
translate([(BarLength/2 + EndCapShim),0,0])
MakeWireChannel(Layout,"Left");
if (Layout[WIRERIGHT] == "Wire")
translate([-(BarLength/2 + EndCapShim),0,0])
MakeWireChannel(Layout,"Right");
}
}
//- Build it
ShowPegGrid();
if (Layout == "Channels") {
translate([ (2*WireChannel + 1.0),0,0]) MakeWireChannel(DefaultLayout,"Left");
translate([-(2*WireChannel + 1.0),0,0]) MakeWireChannel(DefaultLayout,"Right");
}
if (Layout == "Strip") {
MakeStrip(DefaultLayout);
}
if (Layout == "Show") {
MakeMount(DefaultLayout);
}
if (Layout == "Build") {
if (false) { // original no-drill wiring
translate([0,(3*LEDSegment[SEGWIDTH]),0]) MakeMount([1,2,"Wire","Wire"]); // rear left side, vertical
translate([0,0,0]) MakeMount([5,2,"Wire","NoWire"]); // rear top, across arm
translate([0,-(3*LEDSegment[SEGWIDTH]),0]) MakeMount([6,2,"NoWire","Wire"]); // front top, across arm
}
if (true) { // front: drill panel, rear: route through foot lift lever
translate([0,(3*LEDSegment[SEGWIDTH]),0])
MakeMount([1,2,"NoWire","Wire"]); // rear left side, vertical
translate([0,0,0])
MakeMount([5,2,"Wire","Wire"]); // rear top, across arm
translate([0,-(1*LEDSegment[SEGWIDTH]),0])
rotate(180)
MakeMount([6,2,"NoWire","Wire"]); // front top, across arm
}
}
Now, that looks like Search Engine Optimization it is to die for! Google will give you a different set of pictures, but I own that all-important top row.
Commercial LED strip lights for sewing machines mount their cables with little stick-on anchors and cable ties. I wasn’t happy with the cable tie thing and finally figured this out:
Kenmore 158 – LED strip light cable clips
The clips have that size & shape because they fit exactly atop some pre-cut foam squares from the Tape Lookaside Buffer:
LED strip light cable clips
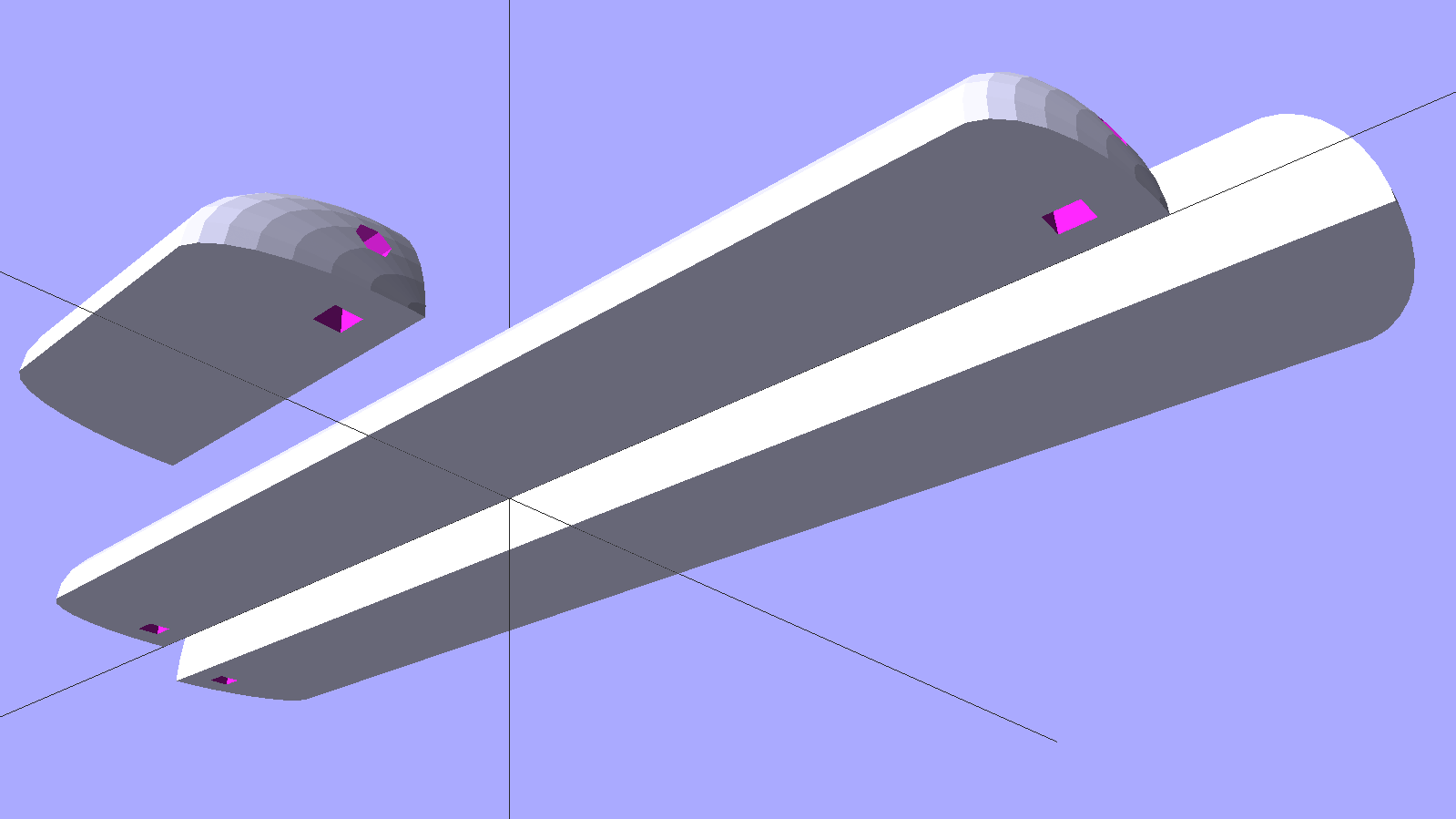
You can see the shape better in the solid model:
LED Cable Clips
The central bollard has a slight taper to retain the cable, the quarter-posts are straight, and they’re both twice the cable diameter tall. The clearance between the center and corner posts at the top matches the cable diameter, so there’s a bit of bending room at the bottom, and, with the cable bent around the center, it won’t fall out on its own.
The cute coaxial cable I’m misusing for the LED strips measures just shy of 2 mm, making these into little bitty things. The corner posts seem surprisingly strong, despite 3D printing’s reputation for crappy quality; I haven’t been able to break one off with more effort than seemed warranted.
The OpenSCAD source code:
// LED Cable Clips
// Ed Nisley - KE4ZNU - October 2014
//- Extrusion parameters must match reality!
ThreadThick = 0.20;
ThreadWidth = 0.40;
HoleWindage = 0.2; // extra clearance
Protrusion = 0.1; // make holes end cleanly
AlignPinOD = 1.70; // assembly alignment pins: filament dia
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
//----------------------
// Dimensions
Base = [12.0,12.0,IntegerMultiple(2.0,ThreadThick)]; // base over sticky square
CableOD = 2.0;
BendRadius = 3.0;
Bollard = [BendRadius,(sqrt(2)*Base[0]/2 - CableOD - BendRadius),2*CableOD];
B_BOT = 0;
B_TOP = 1;
B_LEN = 2;
NumSides = 5*4;
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
RangeX = floor(100 / Space);
RangeY = floor(125 / Space);
for (x=[-RangeX:RangeX])
for (y=[-RangeY:RangeY])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//----------------------
// Build it
ShowPegGrid();
intersection() {
translate([0,0,(Base[2] + Bollard[2])/2]) // overall XYZ outline
cube(Base + [0,0,Bollard[2]],center=true);
union() {
translate([0,0,Base[2]/2]) // oversize mount base
scale([2,2,1])
cube(Base,center=true);
for (i=[-1,1] , j=[-1,1]) { // corner bollards
translate([i*Base[0]/2,j*Base[1]/2,(Base[2] - Protrusion)])
rotate(180/NumSides)
cylinder(r=Bollard[B_BOT],h=(Bollard[B_LEN] + Protrusion),center=false,$fn=NumSides);
translate([0,0,(Base[2] - Protrusion)]) // center tapered bollard
cylinder(r1=Bollard[B_BOT],r2=Bollard[B_TOP],h=(Bollard[B_LEN] + Protrusion),center=false,$fn=NumSides);
}
}
}
Now that I think of it, maybe a round clip would look nicer. The central bollard would stay, but the circular outside rim could have three cutouts. When these fall off, I’ll give that a try.
They may be square and clunky, but they look much better than Gorilla Tape…
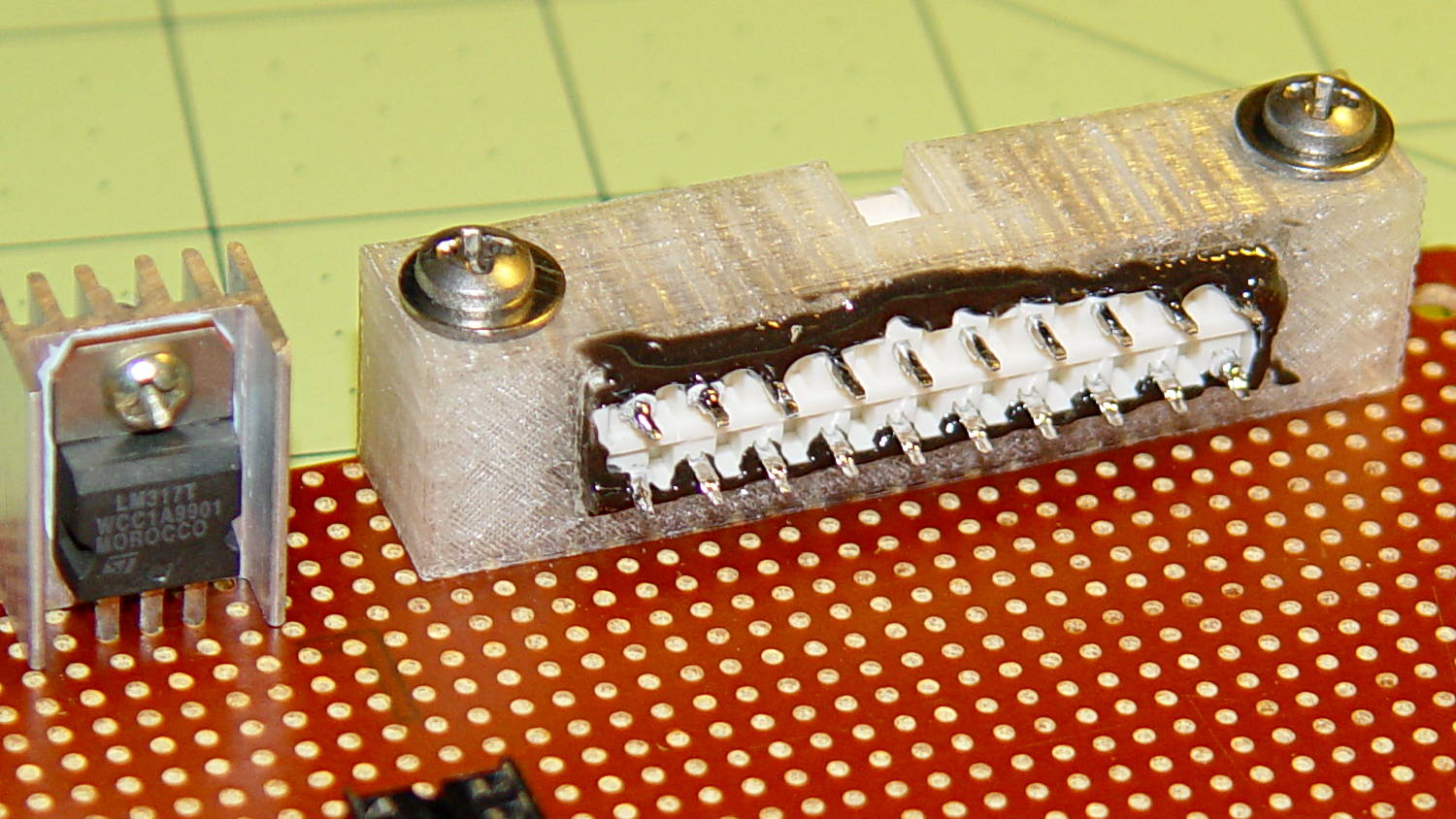
The GX270 case contains a perfectly serviceable ATX power supply that can power all the bits & pieces that don’t run directly from the AC power line. I torched the connector off the system board, but there’s no practical way to mount it standing up through the prototyping board I’m using for the low voltage electronics. This bracket surrounds that connector and holds it at right angles to the board, with a pair of screws clamping it in place:
ATX Connector Bracket – front
I invoked the shade of Willy McCoy, slashed the outside of the connector with a razor knife, buttered it up with epoxy, and shoved it flush inside the adapter. That messy epoxy bead around the joint should prevent it from pulling out to the front:
ATX Connector Bracket – rear
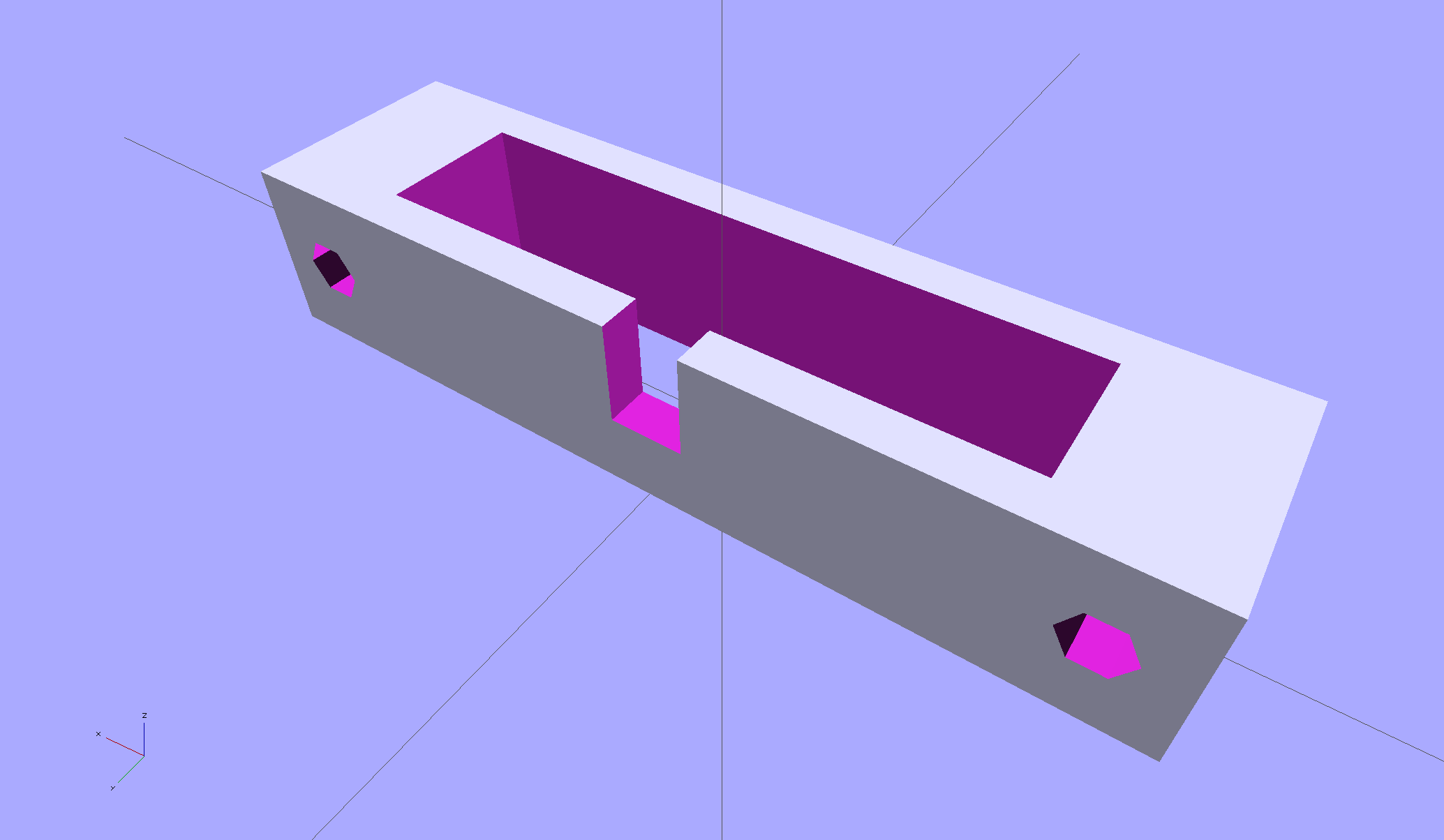
The solid model looks like you’d expect:
ATX Connector Mount
In the unlikely event you need one, make sure the slot clears the locking clip on your ATX connector, as they differ between (at least) the 20 and 24 pin versions. This is actually a split 20/24 connector, with the smaller connector terminating elsewhere to power the LED strips.