Although I’d thought of a Mu-metal shield, copper foil tape should be easier and safer to shape into a simple shield. The general idea is to line the interior with copper tape, solder the joints together, cover with Kapton tape to reduce the likelihood of shorts, then stick it in place with some connector pin-and-socket combinations. Putting the tape on the outside would be much easier, but that would surround the circuitry with a layer of plastic that probably carries enough charge to throw things off.
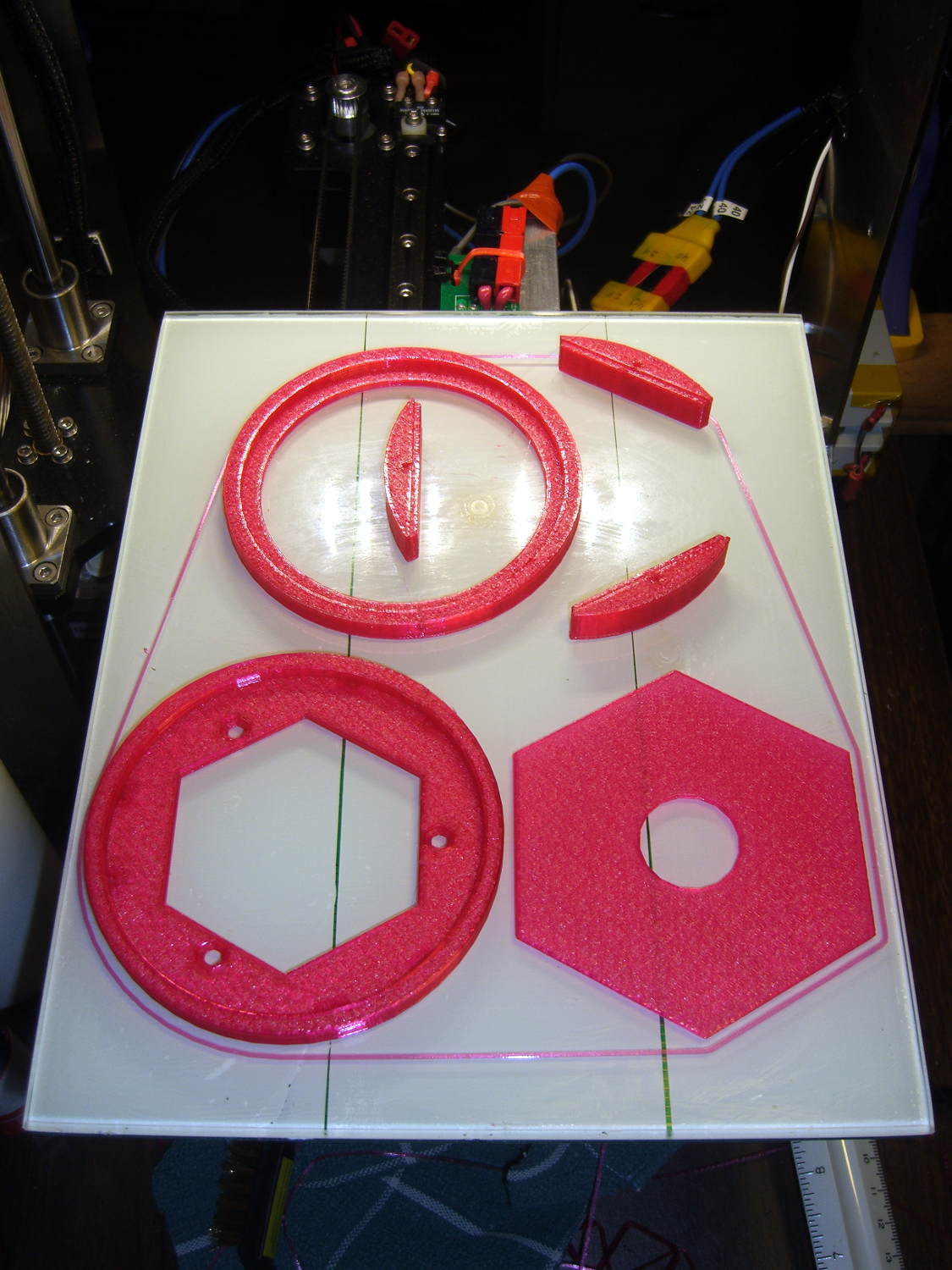
Anyhow, the hexagonal circuit board model now sports a hexagonal cap to support the shield:
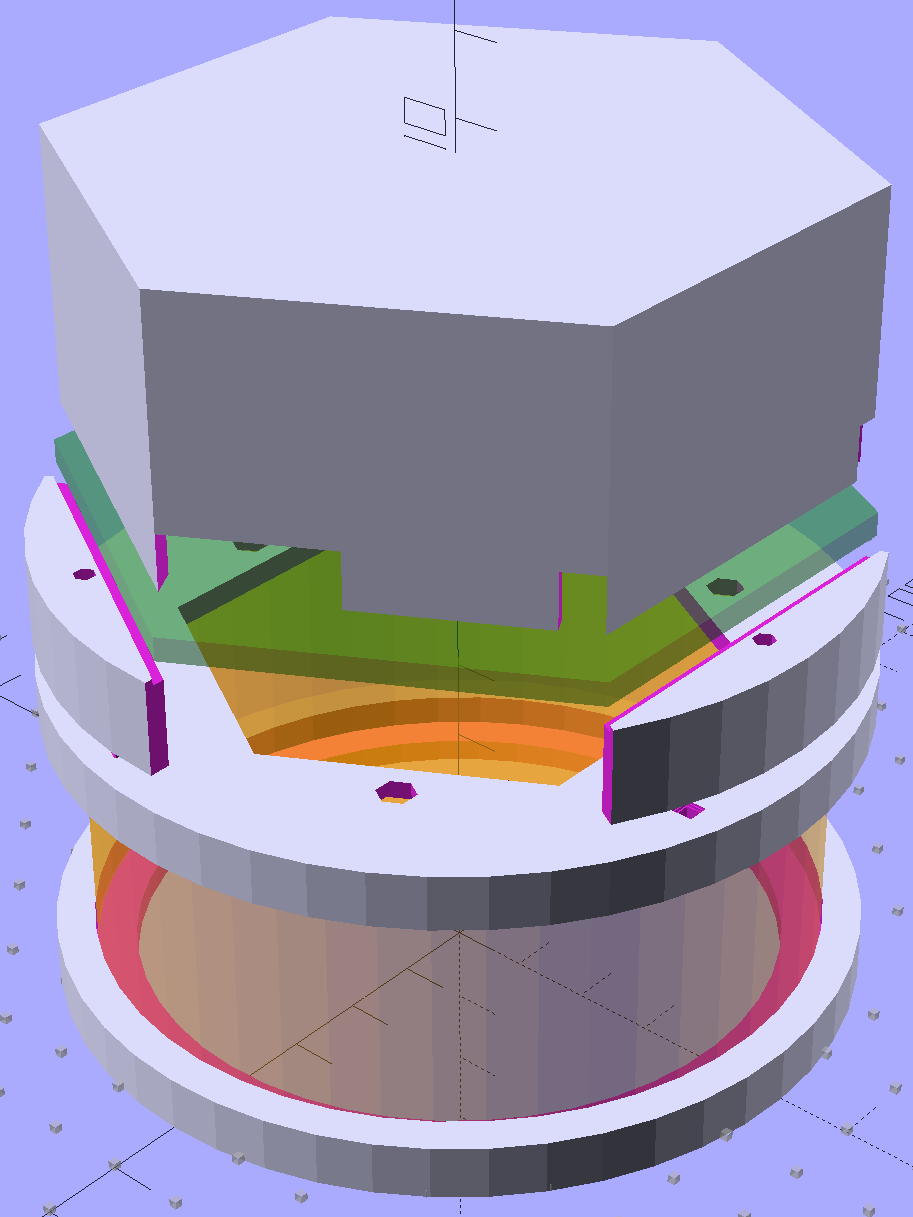
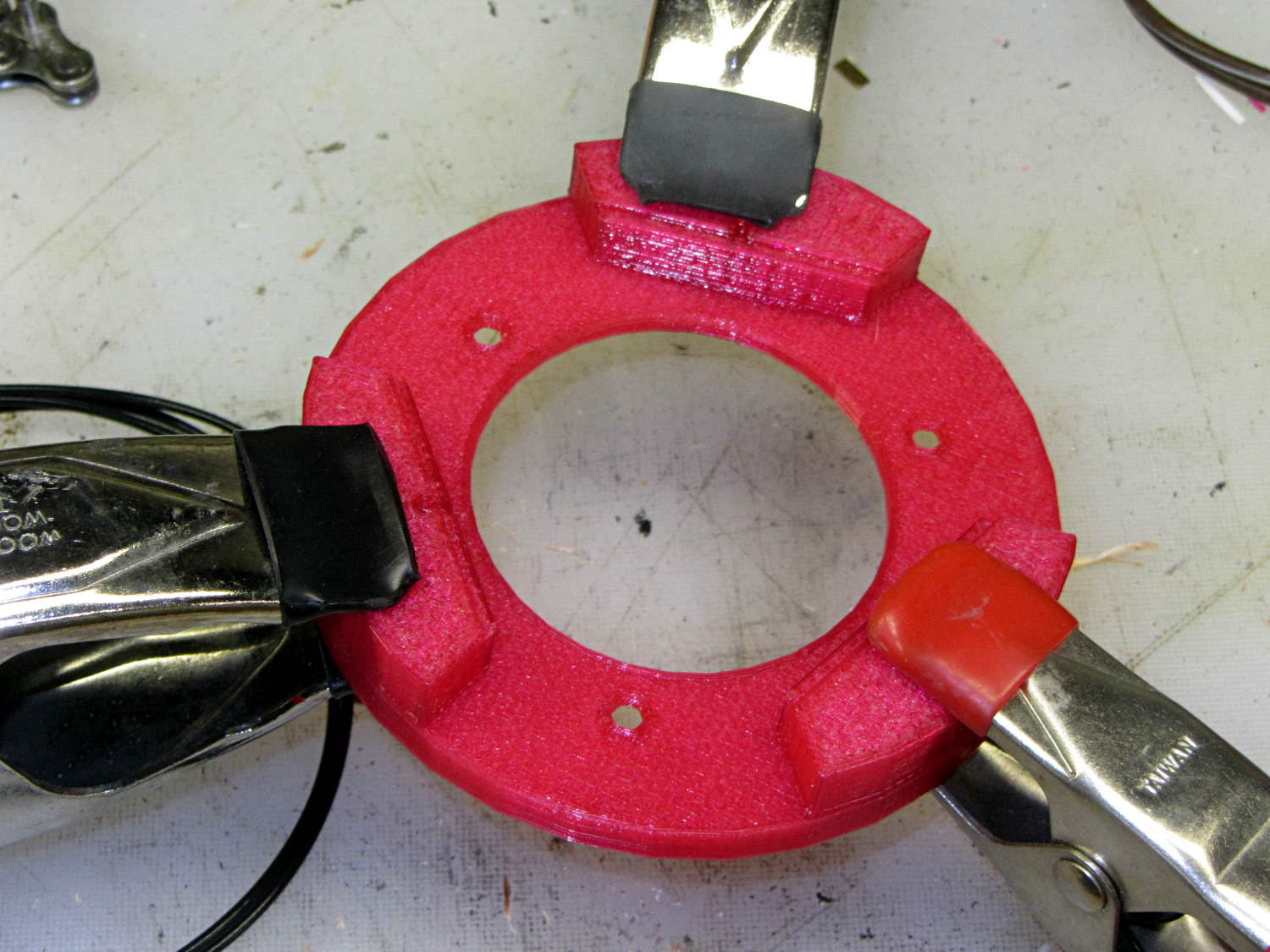
The ad-hoc openings fit various switches, wires, & twiddlepots:
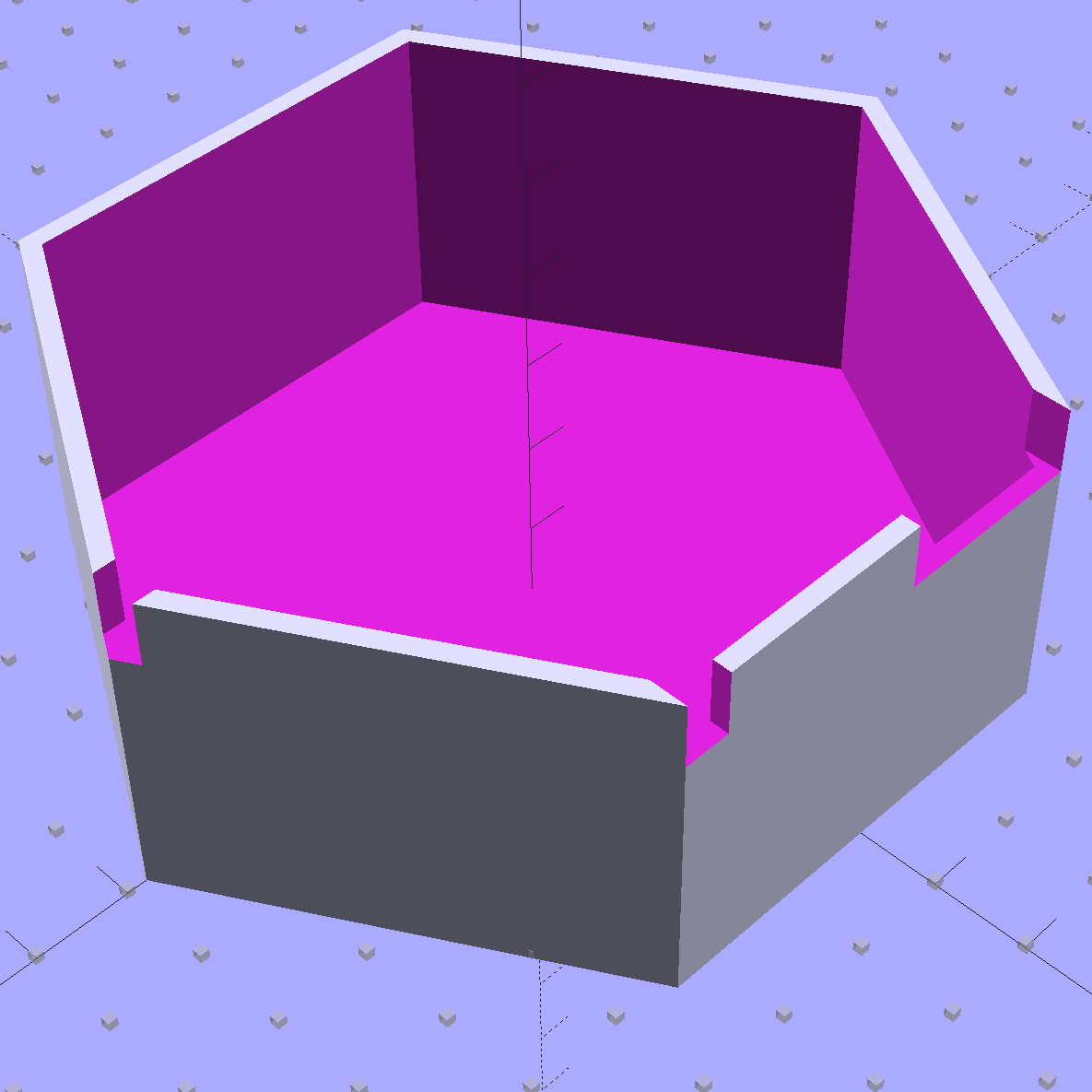
Ya gotta start somewhere.
The OpenSCAD source code:
// Victoreen 710-104 Ionization Chamber Fittings
// Ed Nisley KE4ZNU July 2015
Layout = "Show";
// Show - assembled parts
// Build - print can parts + shield
// BuildShield - print just the shield
// CanCap - PCB insulator for 6-32 mounting studs
// CanBase - surrounding foot for ionization chamber
// CanLid - generic surround for either end of chamber
// PCB - template for cutting PCB sheet
// PCBBase - holder for PCB atop CanCap
// Shield - electrostatic shield shell
//- Extrusion parameters must match reality!
// Print with 2 shells and 3 solid layers
ThreadThick = 0.25;
ThreadWidth = 0.40;
HoleWindage = 0.2;
Protrusion = 0.1; // make holes end cleanly
AlignPinOD = 1.75; // assembly alignment pins = filament dia
inch = 25.4;
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
//- Screw sizes
Tap4_40 = 0.089 * inch;
Clear4_40 = 0.110 * inch;
Head4_40 = 0.211 * inch;
Head4_40Thick = 0.065 * inch;
Nut4_40Dia = 0.228 * inch;
Nut4_40Thick = 0.086 * inch;
Washer4_40OD = 0.270 * inch;
Washer4_40ID = 0.123 * inch;
//----------------------
// Dimensions
OD = 0; // name the subscripts
LENGTH = 1;
Chamber = [91.0 + HoleWindage,38]; // Victoreen ionization chamber dimensions
Stud = [ // stud welded to ionization chamber lid
[6.5,IntegerMultiple(0.8,ThreadThick)], // flat head -- generous clearance
[4.0,9.5], // 6-32 screw -- ditto
];
NumStuds = 3;
StudSides = 6; // for hole around stud
BCD = 2.75 * inch; // mounting stud bolt circle diameter
PlateThick = 3.0; // layer atop and below chamber ends
RimHeight = 4.0; // extending up along chamber perimeter
WallHeight = RimHeight + PlateThick;
WallThick = 5.0; // thick enough to be sturdy & printable
CapSides = 8*6; // must be multiple of 4 & 3 to make symmetries work out right
PCBFlatsOD = 85.0; // hex dia across flats + clearance
PCBClearance = ThreadWidth; // clearance on each flat
PCBThick = 1.1;
PCBActual = [PCBFlatsOD/cos(30),PCBThick];
PCBCutter = [(PCBFlatsOD + 2*PCBClearance)/cos(30),PCBThick - ThreadThick]; // OD = tip-to-tip dia with clearance
echo(str("Actual PCB across flats: ",PCBFlatsOD));
echo(str(" ... tip-to-tip dia: ",PCBActual[OD]));
echo(str(" ... thickness: ",PCBActual[LENGTH]));
HolderHeight = 11.0 + PCBCutter[LENGTH]; // thick enough for PCB to clear studs
HolderShelf = 2.0; // shelf under PCB edge
PinAngle = 15; // alignment pin angle on either side of holder screw
echo(str("PCB holder across flats: ",PCBCutter[OD]*cos(30)));
echo(str(" ... height: ",HolderHeight));
ShieldInset = 1.0; // shield inset from actual PCB flat
ShieldWall = 2.0; // wall thickness
Shield = [(PCBFlatsOD - 2*ShieldInset)/ cos(30),35.0]; // electrostatic shield shell shape
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
//- Locating pin hole with glue recess
// Default length is two pin diameters on each side of the split
module LocatingPin(Dia=AlignPinOD,Len=0.0) {
PinLen = (Len != 0.0) ? Len : (4*Dia);
translate([0,0,-ThreadThick])
PolyCyl((Dia + 2*ThreadWidth),2*ThreadThick,4);
translate([0,0,-2*ThreadThick])
PolyCyl((Dia + 1*ThreadWidth),4*ThreadThick,4);
translate([0,0,-Len/2])
PolyCyl(Dia,Len,4);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
RangeX = floor(100 / Space);
RangeY = floor(125 / Space);
for (x=[-RangeX:RangeX])
for (y=[-RangeY:RangeY])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//-----
module CanLid() {
difference() {
cylinder(d=Chamber[OD] + 2*WallThick,h=WallHeight,$fn=CapSides);
translate([0,0,PlateThick])
PolyCyl(Chamber[OD],Chamber[1],CapSides);
}
}
module CanCap() {
difference() {
CanLid();
translate([0,0,-Protrusion]) // central cutout
rotate(180/6)
cylinder(d=BCD,h=Chamber[LENGTH],$fn=6); // ... reasonable size
for (i=[0:(NumStuds - 1)]) // stud clearance holes
rotate(i*360/NumStuds)
translate([BCD/2,0,0])
rotate(180/StudSides) {
translate([0,0,(PlateThick - (Stud[0][LENGTH] + 2*ThreadThick))])
PolyCyl(Stud[0][OD],2*Stud[0][LENGTH],StudSides);
translate([0,0,-Protrusion])
PolyCyl(Stud[1][OD],2*Stud[1][LENGTH],StudSides);
}
for (i=[0:(NumStuds - 1)], j=[-1,1]) // PCB holder alignment pins
rotate(i*360/NumStuds + j*PinAngle + 60)
translate([Chamber[OD]/2,0,0])
rotate(180/4 - j*PinAngle)
LocatingPin(Len=2*PlateThick - 2*ThreadThick);
}
}
module CanBase() {
difference() {
CanLid();
translate([0,0,-Protrusion])
PolyCyl(Chamber[OD] - 2*5.0,Chamber[1],CapSides);
}
}
module PCBTemplate() {
difference() {
cylinder(d=PCBActual[OD],h=max(PCBActual[LENGTH],3.0),$fn=6); // actual PCB size, overly thick
translate([0,0,-Protrusion])
cylinder(d=10,h=10*PCBActual[LENGTH],$fn=12);
}
}
module PCBBase() {
difference() {
cylinder(d=Chamber[OD] + 2*WallThick,h=HolderHeight,$fn=CapSides); // outer rim
rotate(30) {
translate([0,0,-Protrusion]) // central hex
cylinder(d=(PCBActual[OD] - HolderShelf/cos(30)),h=2*HolderHeight,$fn=6);
translate([0,0,HolderHeight - PCBCutter[LENGTH]]) // hex PCB recess
cylinder(d=PCBCutter[OD],h=HolderHeight,$fn=6);
for (i=[0:NumStuds - 1]) // PCB retaining screws
rotate(i*120 + 30)
translate([(PCBCutter[OD]*cos(30)/2 + Clear4_40/2 + ThreadWidth),0,-Protrusion])
rotate(180/6)
PolyCyl(Tap4_40,2*HolderHeight,6);
for (i=[0:(NumStuds - 1)], j=[-1,1]) // PCB holder alignment pins
rotate(i*360/NumStuds + j*PinAngle + 30)
translate([Chamber[OD]/2,0,0])
rotate(180/4 - j*PinAngle)
LocatingPin(Len=PlateThick);
}
for (i=[0:NumStuds - 1]) // segment isolation
rotate(i*120 - 30)
translate([0,0,-Protrusion]) {
linear_extrude(height=2*HolderHeight)
polygon([[0,0],[Chamber[OD],0],[Chamber[OD]*cos(60),Chamber[OD]*sin(60)]]);
}
}
}
//-- Electrostatic shield
// the cutouts are completely ad-hoc
module ShieldShell() {
CutHeight = 7.0;
difference() {
cylinder(d=Shield[OD],h=Shield[LENGTH],$fn=6);
translate([0,0,-ShieldWall])
cylinder(d=(Shield[OD] - 2*ShieldWall/cos(30)),h=Shield[LENGTH],$fn=6);
translate([Shield[OD]/4 - 20/2,Shield[OD]/2,(CutHeight - Protrusion)/2])
rotate(90)
cube([Shield[OD],20,CutHeight + Protrusion],center=true);
translate([-Shield[OD]/4 + 5/2,Shield[OD]/2,(CutHeight - Protrusion)/2])
rotate(90)
cube([Shield[OD],5,CutHeight + Protrusion],center=true);
translate([-Shield[OD]/2,0,(CutHeight - Protrusion)/2])
cube([Shield[OD],5,CutHeight + Protrusion],center=true);
}
}
//----------------------
// Build it
ShowPegGrid();
if (Layout == "CanLid") {
CanLid();
}
if (Layout == "CanCap") {
CanCap();
}
if (Layout == "CanBase") {
CanBase();
}
if (Layout == "PCBBase") {
PCBBase();
}
if (Layout == "PCB") {
PCBTemplate();
}
if (Layout == "Shield") {
ShieldShell();
}
if (Layout == "Show") {
CanBase();
color("Orange",0.5)
translate([0,0,PlateThick + Protrusion])
cylinder(d=Chamber[OD],h=Chamber[LENGTH],$fn=CapSides);
translate([0,0,(2*PlateThick + Chamber[LENGTH] + 2*Protrusion)])
rotate([180,0,0])
CanCap();
translate([0,0,(2*PlateThick + Chamber[LENGTH] + 5.0)])
PCBBase();
color("Green",0.5)
translate([0,0,(2*PlateThick + Chamber[LENGTH] + 7.0 + HolderHeight)])
rotate(30)
PCBTemplate();
translate([0,0,(2*PlateThick + Chamber[LENGTH] + 15.0 + HolderHeight)])
rotate(30)
ShieldShell();}
if (Layout == "Build") {
translate([-0.50*Chamber[OD],-0.60*Chamber[OD],0])
CanCap();
translate([0.55*Chamber[OD],-0.60*Chamber[OD],0])
rotate(30)
translate([0,0,Shield[LENGTH]])
rotate([0,180,0])
ShieldShell();
translate([-0.25*Chamber[OD],0.60*Chamber[OD],0])
CanBase();
translate([0.25*Chamber[OD],0.60*Chamber[OD],0])
PCBBase();
}
if (Layout == "BuildShield") {
translate([0,0,Shield[LENGTH]])
rotate([0,180,0])
ShieldShell();
}