As you’d expect, the soft feet on the bottom of the Kenmore Model 158 sewing machine’s foot pedal control turn into hard buttons after a few decades. The OEM feet have mushroom tops that push through holes in the case and latch in place; of course, none of the rubber feet in my collection match the hole diameter or case thickness.
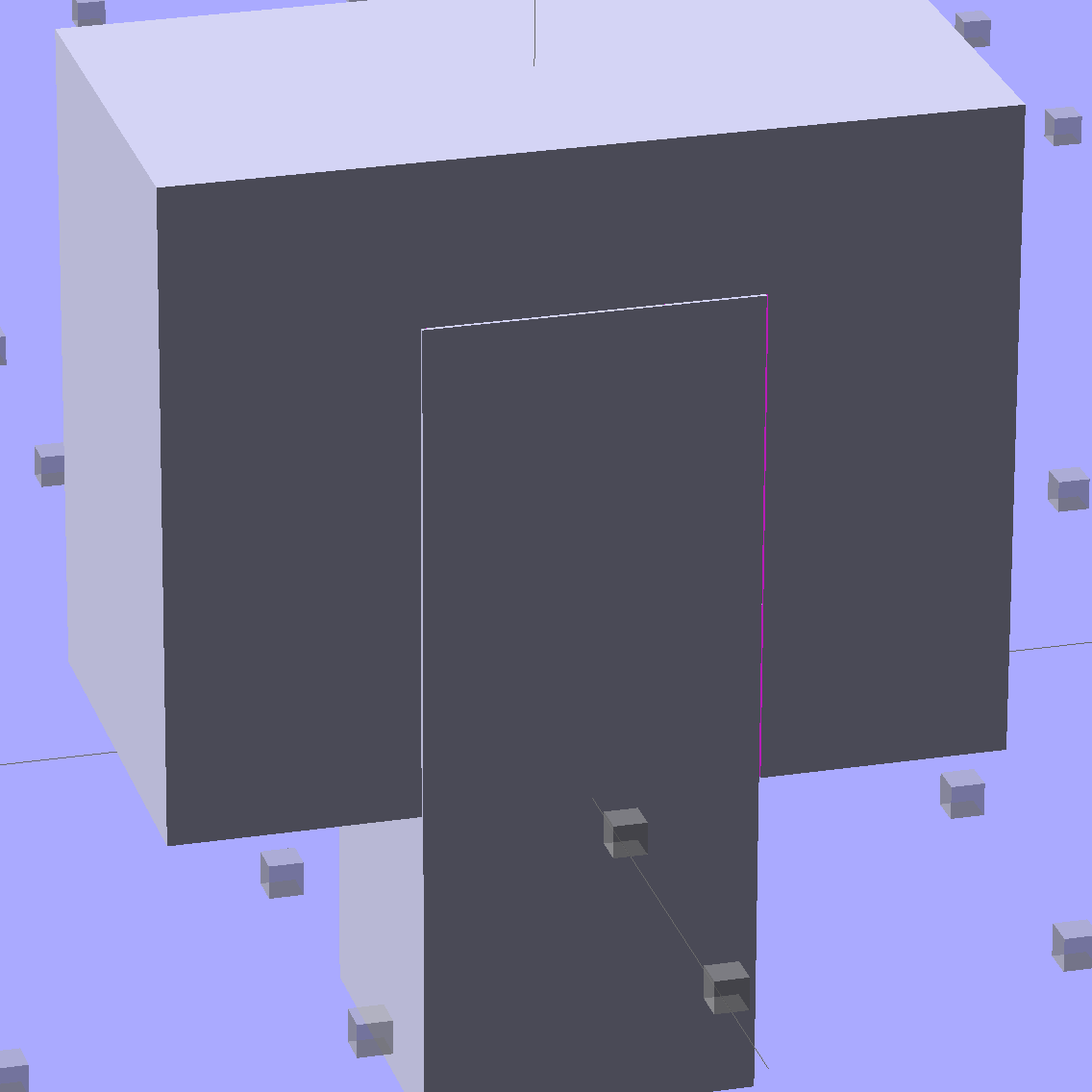
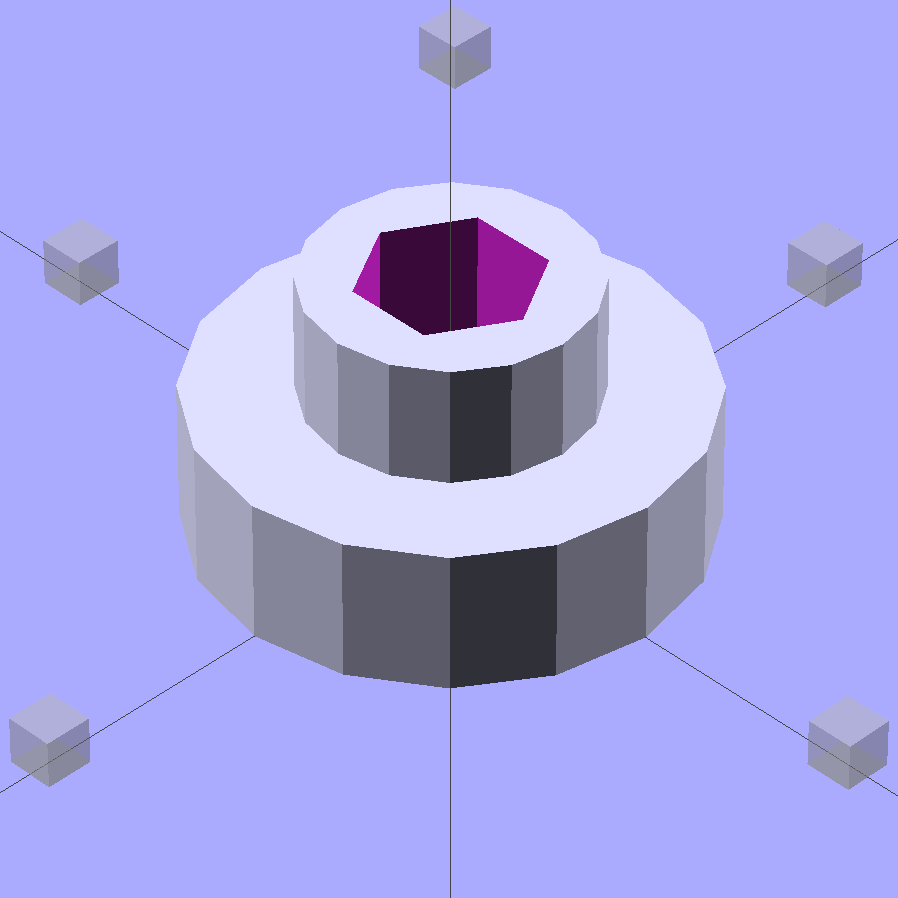
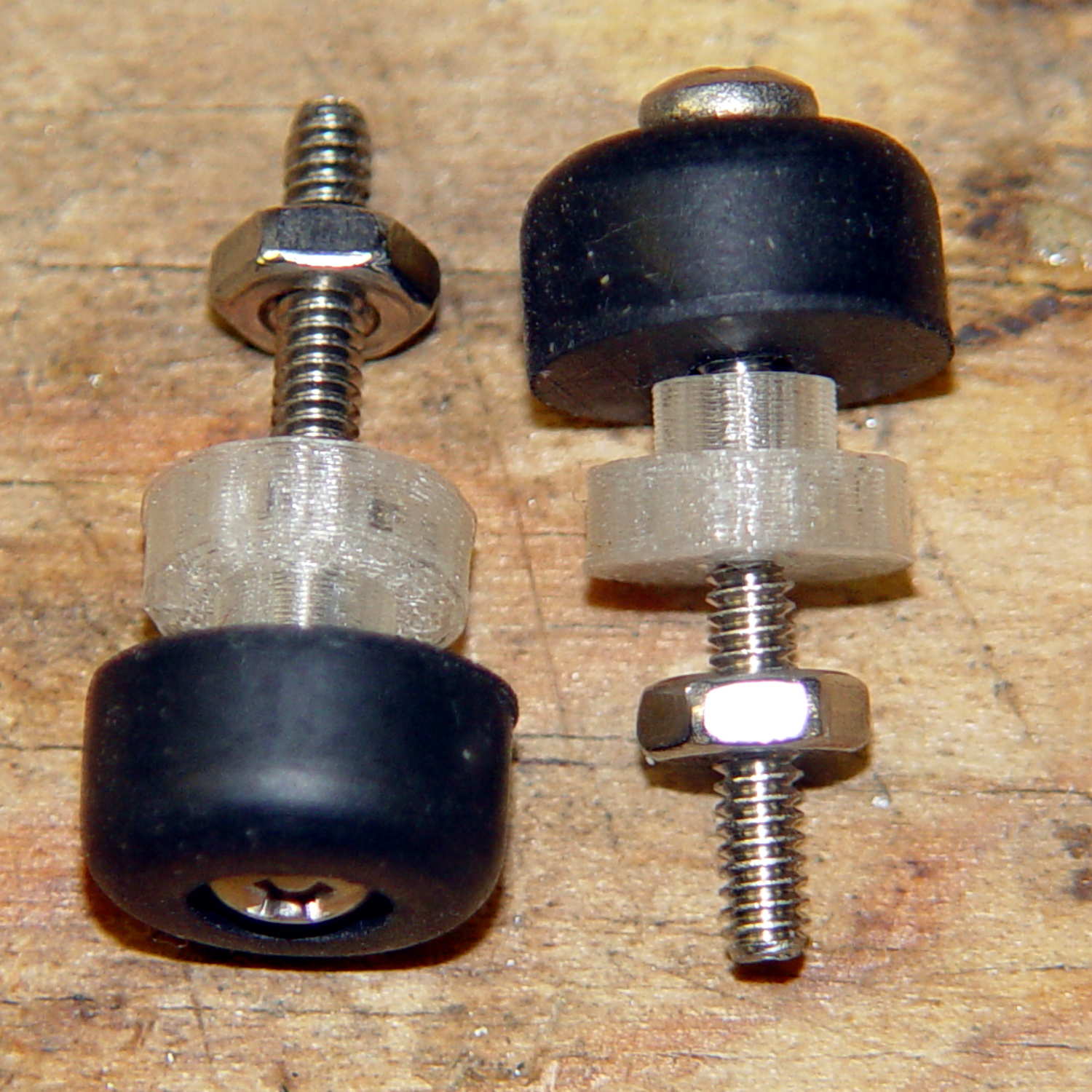
No problem! Design a bushing that fits the case hole and passes a 4-40 screw:
Then print up a handful, add screws to fit the rubber feet, and top off with nuts:
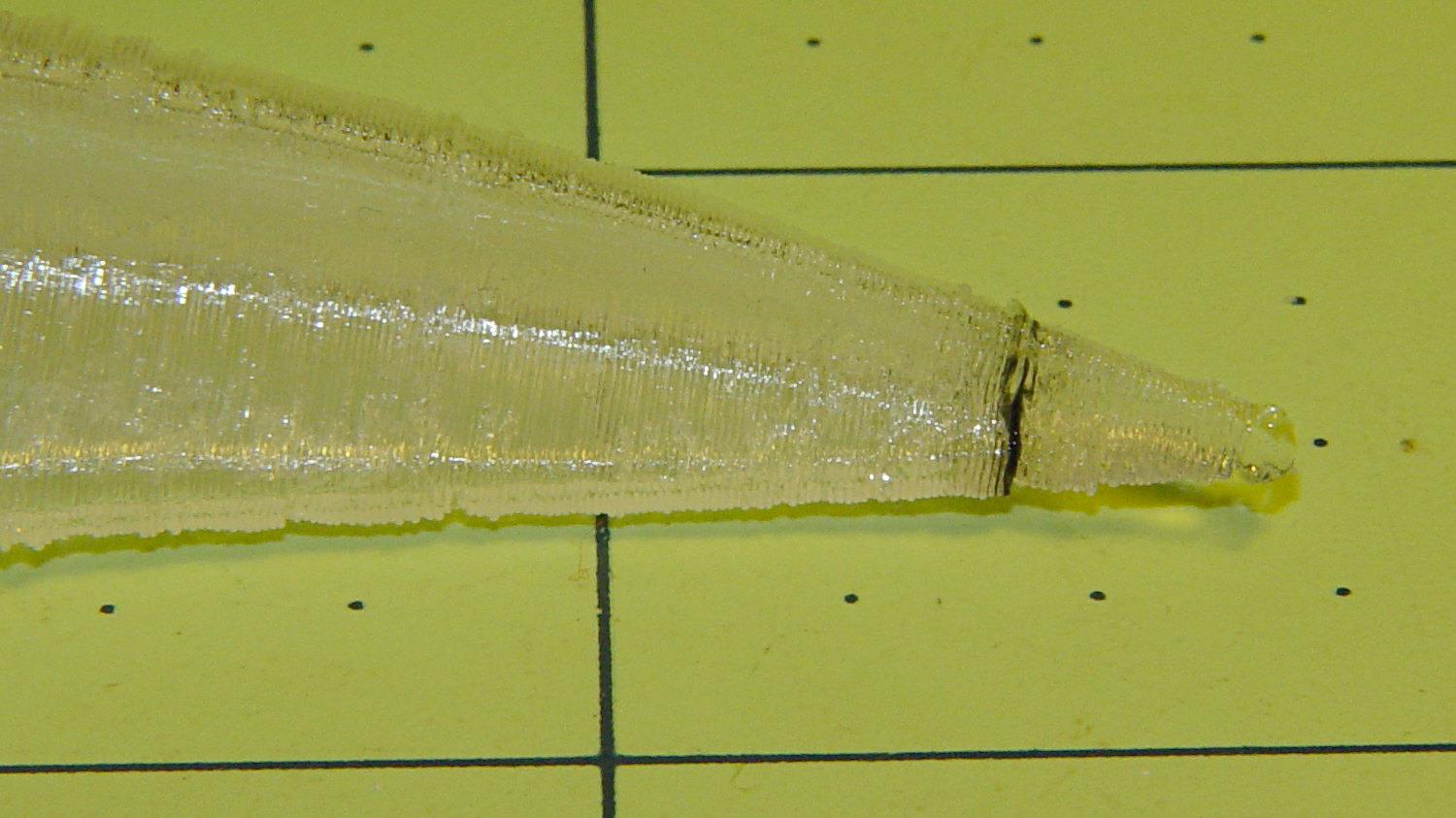
Installed, with the screws cropped to a suitable length, they look about like you’d expect:
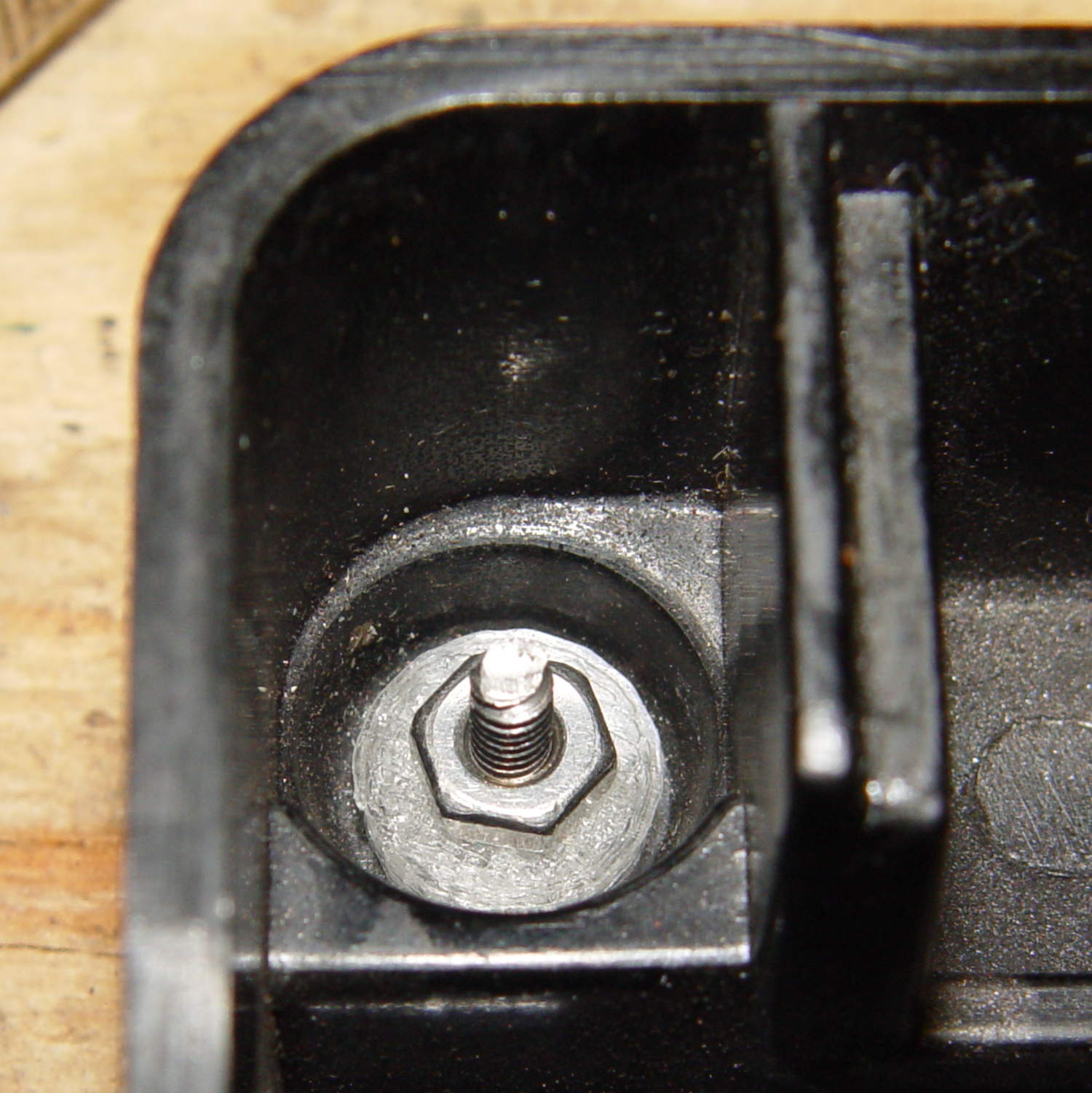
Turns out that the springs supporting the foot pedal rest in those pockets, so the bushing reduces the spring travel by a few millimeters. The springs aren’t completely compressed with the pedal fully depressed, so it’s all good.
The OpenSCAD source code:
// Kenmore Model 158 Sewing Machine Foot Control Bushings
// Ed Nisley - KE4ZNU - June 2014
//- Extrusion parameters must match reality!
// Print with 2 shells and 3 solid layers
ThreadThick = 0.20;
ThreadWidth = 0.40;
HoleWindage = 0.2; // extra clearance
Protrusion = 0.1; // make holes end cleanly
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
//----------------------
// Dimensions
Stem = [2.5,5.7]; // through the case hole
Cap = [3.0,10.0]; // inside the case
LEN = 0;
DIA = 1;
OAL = Stem[LEN] + Cap[LEN];
ScrewDia = 2.8; // 4-40 generous clearance
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
RangeX = floor(100 / Space);
RangeY = floor(125 / Space);
for (x=[-RangeX:RangeX])
for (y=[-RangeY:RangeY])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//----------------------
// Build it!
ShowPegGrid();
difference() {
union() {
cylinder(d=Stem[DIA],h=OAL,$fn=16);
cylinder(d=Cap[DIA],h=Cap[LEN],$fm=16);
}
translate([0,0,-Protrusion])
PolyCyl(ScrewDia,OAL + 2*Protrusion,6);
}