In the course of running off some Superformula plots, I found what must be my original stash of B-size plotter paper. Although it wasn’t archival paper and has yellowed a bit with age, it’s the smoothest and creamiest paper I’ve touched in quite some time: far nicer than the cheap stuff I picked up while reconditioning the HP 7475A plotter & its assorted pens.
Once in a while, all my errors and omissions cancel out enough to produce interesting results on that historic paper, hereby documented for future reference…
A triangle starburst:

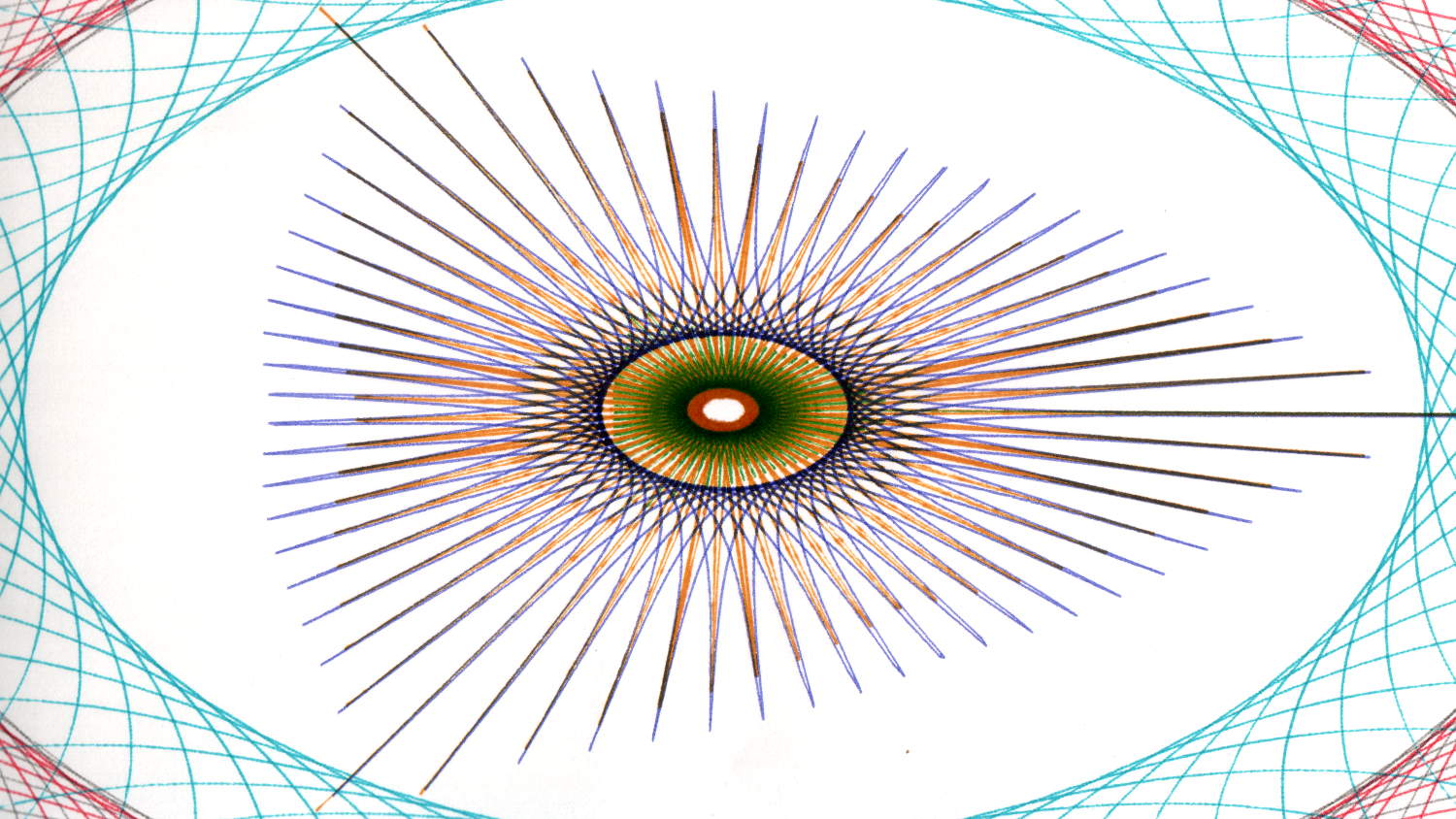
A symmetric starburst:


Complex meshed ovals:


They look better in person, of course. Although inkjet printers produce more accurate results in less time, those old pen plots definitely look better in some sense.
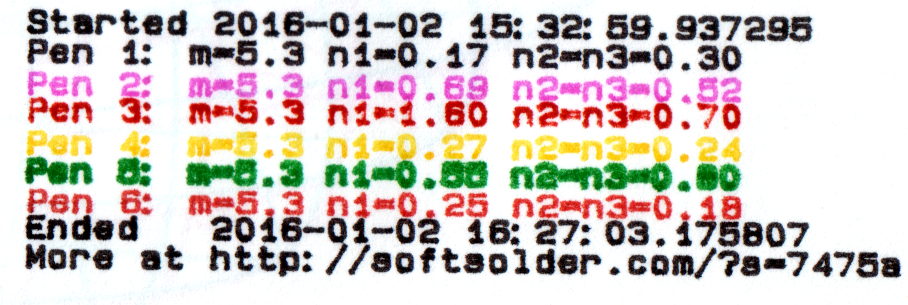
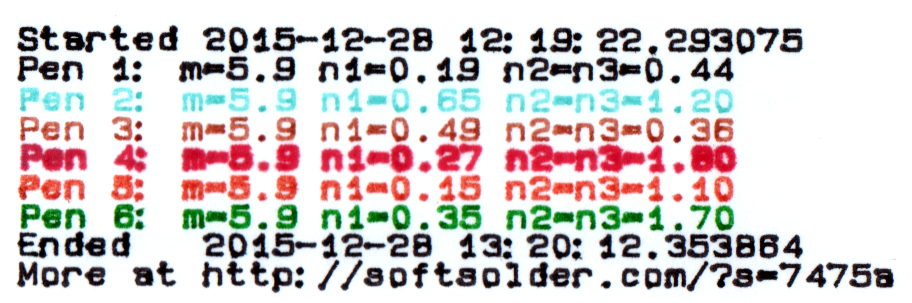
The demo program lets you jam a fixed set of parameters into the plot, so (at least in principle) one could reproduce a plot from the parameters in the lower right corner. Here you go:
The triangle starburst:

The symmetric starburst:
The meshed ovals:
The current Python / Chiplotle source code as a GitHub gist:
| from chiplotle import * | |
| from math import * | |
| from datetime import * | |
| from time import * | |
| from types import * | |
| import random | |
| def superformula_polar(a, b, m, n1, n2, n3, phi): | |
| ''' Computes the position of the point on a | |
| superformula curve. | |
| Superformula has first been proposed by Johan Gielis | |
| and is a generalization of superellipse. | |
| see: http://en.wikipedia.org/wiki/Superformula | |
| Tweaked to return polar coordinates | |
| ''' | |
| t1 = cos(m * phi / 4.0) / a | |
| t1 = abs(t1) | |
| t1 = pow(t1, n2) | |
| t2 = sin(m * phi / 4.0) / b | |
| t2 = abs(t2) | |
| t2 = pow(t2, n3) | |
| t3 = -1 / float(n1) | |
| r = pow(t1 + t2, t3) | |
| if abs(r) == 0: | |
| return (0, 0) | |
| else: | |
| # return (r * cos(phi), r * sin(phi)) | |
| return (r, phi) | |
| def supershape(width, height, m, n1, n2, n3, | |
| point_count=10 * 1000, percentage=1.0, a=1.0, b=1.0, travel=None): | |
| '''Supershape, generated using the superformula first proposed | |
| by Johan Gielis. | |
| – `points_count` is the total number of points to compute. | |
| – `travel` is the length of the outline drawn in radians. | |
| 3.1416 * 2 is a complete cycle. | |
| ''' | |
| travel = travel or (10 * 2 * pi) | |
| # compute points… | |
| phis = [i * travel / point_count | |
| for i in range(1 + int(point_count * percentage))] | |
| points = [superformula_polar(a, b, m, n1, n2, n3, x) for x in phis] | |
| # scale and transpose… | |
| path = [] | |
| for r, a in points: | |
| x = width * r * cos(a) | |
| y = height * r * sin(a) | |
| path.append(Coordinate(x, y)) | |
| return Path(path) | |
| # RUN DEMO CODE | |
| if __name__ == '__main__': | |
| override = False | |
| plt = instantiate_plotters()[0] | |
| # plt.write('IN;') | |
| if plt.margins.soft.width < 11000: # A=10365 B=16640 | |
| maxplotx = (plt.margins.soft.width / 2) – 100 | |
| maxploty = (plt.margins.soft.height / 2) – 150 | |
| legendx = maxplotx – 2900 | |
| legendy = -(maxploty – 750) | |
| tscale = 0.45 | |
| numpens = 4 | |
| # prime/10 = number of spikes | |
| m_values = [n / 10.0 for n in [11, 13, 17, 19, 23]] | |
| # ring-ness 0.1 to 2.0, higher is larger | |
| n1_values = [ | |
| n / 100.0 for n in range(55, 75, 2) + range(80, 120, 5) + range(120, 200, 10)] | |
| else: | |
| maxplotx = plt.margins.soft.width / 2 | |
| maxploty = plt.margins.soft.height / 2 | |
| legendx = maxplotx – 3000 | |
| legendy = -(maxploty – 900) | |
| tscale = 0.45 | |
| numpens = 6 | |
| m_values = [n / 10.0 for n in [11, 13, 17, 19, 23, 29, 31, | |
| 37, 41, 43, 47, 53, 59]] # prime/10 = number of spikes | |
| # ring-ness 0.1 to 2.0, higher is larger | |
| n1_values = [ | |
| n / 100.0 for n in range(15, 75, 2) + range(80, 120, 5) + range(120, 200, 10)] | |
| print " Max: ({},{})".format(maxplotx, maxploty) | |
| # spiky-ness 0.1 to 2.0, higher is spiky-er (mostly) | |
| n2_values = [ | |
| n / 100.0 for n in range(10, 60, 2) + range(65, 100, 5) + range(110, 200, 10)] | |
| plt.write(chr(27) + '.H200:') # set hardware handshake block size | |
| plt.set_origin_center() | |
| # scale based on B size characters | |
| plt.write(hpgl.SI(tscale * 0.285, tscale * 0.375)) | |
| # slow speed for those abrupt spikes | |
| plt.write(hpgl.VS(10)) | |
| while True: | |
| # standard loadout has pen 1 = fine black | |
| plt.write(hpgl.PA([(legendx, legendy)])) | |
| pen = 1 | |
| plt.select_pen(pen) | |
| plt.write(hpgl.PA([(legendx, legendy)])) | |
| plt.write(hpgl.LB("Started " + str(datetime.today()))) | |
| if override: | |
| m = 4.1 | |
| n1_list = [1.15, 0.90, 0.25, 0.59, 0.51, 0.23] | |
| n2_list = [0.70, 0.58, 0.32, 0.28, 0.56, 0.26] | |
| else: | |
| m = random.choice(m_values) | |
| n1_list = random.sample(n1_values, numpens) | |
| n2_list = random.sample(n2_values, numpens) | |
| pen = 1 | |
| for n1, n2 in zip(n1_list, n2_list): | |
| n3 = n2 | |
| print "{0} – m: {1:.1f}, n1: {2:.2f}, n2=n3: {3:.2f}".format(pen, m, n1, n2) | |
| plt.select_pen(pen) | |
| plt.write(hpgl.PA([(legendx, legendy – 100 * pen)])) | |
| plt.write( | |
| hpgl.LB("Pen {0}: m={1:.1f} n1={2:.2f} n2=n3={3:.2f}".format(pen, m, n1, n2))) | |
| e = supershape(maxplotx, maxploty, m, n1, n2, n3) | |
| plt.write(e) | |
| pen = pen + 1 if (pen % numpens) else 1 | |
| pen = 1 | |
| plt.select_pen(pen) | |
| plt.write(hpgl.PA([(legendx, legendy – 100 * (numpens + 1))])) | |
| plt.write(hpgl.LB("Ended " + str(datetime.today()))) | |
| plt.write(hpgl.PA([(legendx, legendy – 100 * (numpens + 2))])) | |
| plt.write(hpgl.LB("More at https://softsolder.com/?s=7475a")) | |
| plt.select_pen(0) | |
| plt.write(hpgl.PA([(-maxplotx,maxploty)])) | |
| print "Waiting for plotter… ignore timeout errors!" | |
| sleep(40) | |
| while NoneType is type(plt.status): | |
| sleep(5) | |
| print "Load more paper, then …" | |
| print " … Press ENTER on the plotter to continue" | |
| plt.clear_digitizer() | |
| plt.digitize_point() | |
| plotstatus = plt.status | |
| while (NoneType is type(plotstatus)) or (0 == int(plotstatus) & 0x04): | |
| plotstatus = plt.status | |
| print "Digitized: " + str(plt.digitized_point) | |