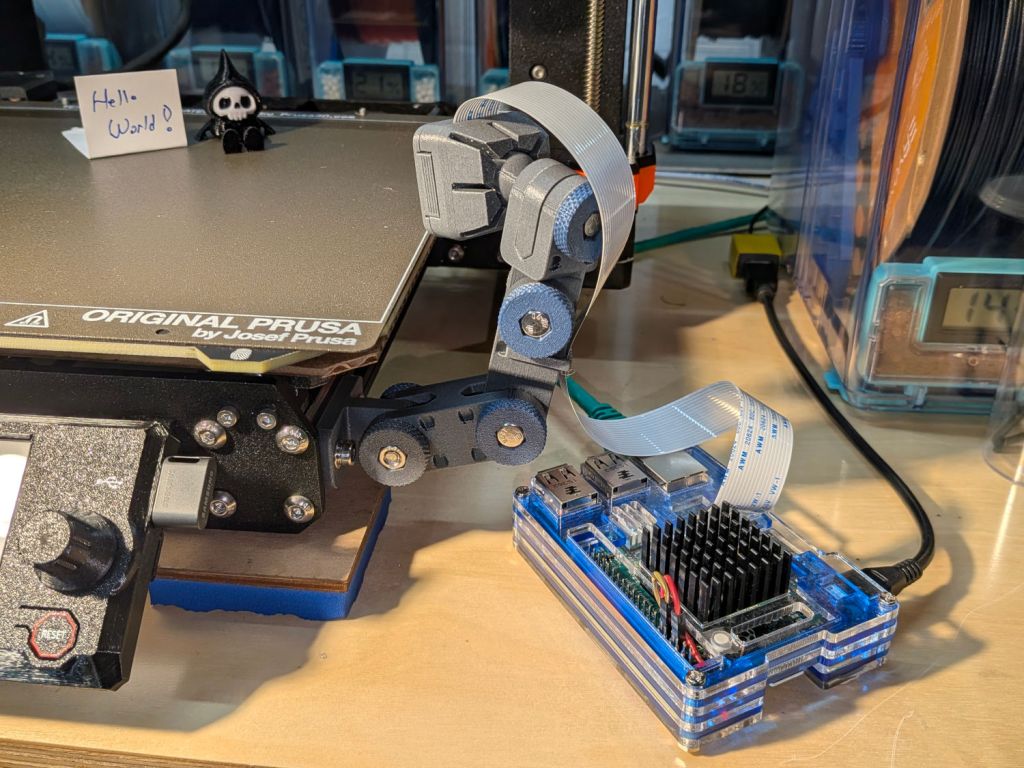
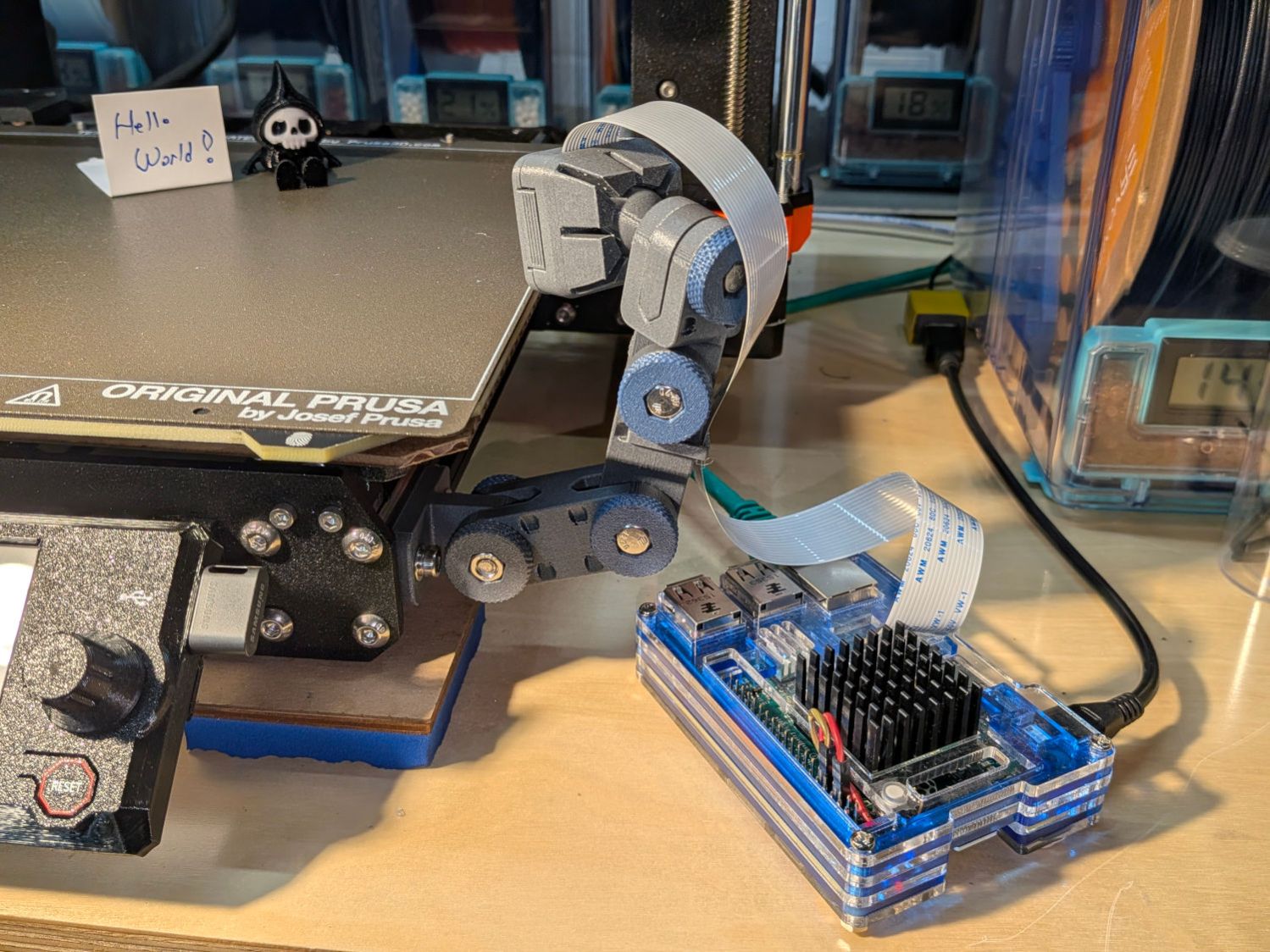
The rpicam.cfg file holding the parameters for the Raspberry Pi watching the Prusa MK 4 printer:
bitrate=2000000
framerate=15
timeout=0
nopreview=
codec=libav
libav-format=mpegts
width=1280
height=720
rotation=180
roi=0.00,0.00,1.0,1.0
hdr=auto
The RPi camera for the wren nest is just taped to the window, but has a configuration providing a bigger picture:
bitrate=2000000
framerate=15
timeout=0
nopreview=
codec=libav
libav-format=mpegts
width=1920
height=1080
roi=0.00,0.00,1.0,1.0
hdr=auto
The useful pieces:
bitratesets the average data rate, which may be too high for comfort outside your immediate LANframerateneed not be as high as you thinknopreviewprevents a preview picture while startingwidthandheightdo the obvious thing, but don’t try to be too cleverroipicks the image from a specific part of the camera sensor, so you can adjust the image layout if you have a rigidly fixed camerahdrdoesn’t do anything for cheap RPi cameras
Putting all the fiddly config in a file reduces the command line invocation to a mere jawbreaker:
rpicam-vid --config rpicam.cfg -o - | cvlc stream:///dev/stdin --sout '#rtp{sdp=rtsp://:5886/wrens}' &
Although you’d want to set that up to run automagically when the RPi starts up, for now I just fire it off as needed through an SSH session, with the ampersand letting it run after that terminal session closes.
The RTSP port (5886) and stream (wrens) can be anything you like, which comes in handy when squirting streams through port-forwarded firewall pinholes using a router that cannot handle different external and internal port numbers.
Useful background info:






















{kind=link}