Mary’s most recent quilt arranges her color choices in Judy Niemeyer’s Stellar Snowflake pattern:

Her Juki TL-2010Q sewing machine has a built-in thread cutter activated by pressing down on the heel end (to the left) of the foot control:

The machine had previously performed “uncommanded” thread cuts on other projects, but the many short segments in this pattern triggered far too many cuts. I aimed a camera at her foot on the pedal and she was definitely not pressing down with her heel when the cutter fired.
In point of fact, the thread cutter fired when she was just starting a new segment, where she was gently pressing down on the toe end (to the right) of the pedal to start at the slowest possible speed.
For completeness, the underside of the pedal:

There are no screws holding it together. The top cover pivots on a pair of plastic pegs sticking out from the base near the middle of the cable spool. Disassembly requires jamming a pair of husky Prydrivers in there and applying enough brute force to pry both sides outward farther than you (well, I) think they should bend. This will scar the bottom of the case, but nobody will ever notice.
The foot control cable plugs into the machine through what looks like an ordinary two-conductor coax plug, just like the ones on wall warts delivering power to gadgets around the house. In this day and age, the communications protocol could be anything from a simple resistor to a full-frontal 1-Wire encrypted data exchange.
Based on the old Kenmore foot pedals, I expected a resistive control and, indeed, a simple test gave these results:
- Idle = 140 kΩ
- Heel pressed (cut) = 46 kΩ
- Toe slight press (slow running) = 20 kΩ
- Toe full press (fast running) = 0.2 kΩ
We can all see where this is going, but just to be sure I pried the top off the control to reveal the insides:

The two cylindrical features capture the ends of a pair of stiff compression springs pressing the top of the pedal upward.
The small, slightly stretched, extension spring in the middle pulls the slider to the left (heelward), with a ramp in the top cover forcing it to the right (toeward) as the speed increases.
The top cover includes a surprisingly large hunk of metal which may provide enough mass to make the pedal feel good:

The ramp is plastic and the slider has a pair of nylon (-ish) rollers, so there’s not much friction involved in the speed control part of motion. Yes, this is oriented the other way, with the heel end over on the right.
The metal insert pivots in the serrated plastic section near the middle, with the two husky extension springs visible on the left holding it against the plastic cover. The two rectangular features on the left rest under the plastic flanges on the right of the base to prevent the metal insert from moving upward, so pressing the heel end down pulls the cover away from the insert to let the slider rollers move toward the right end of the ramp, into roughly the position shown in the interior view.
A closeup look at the slider shows the rollers and the PCB holding all of the active ingredients:
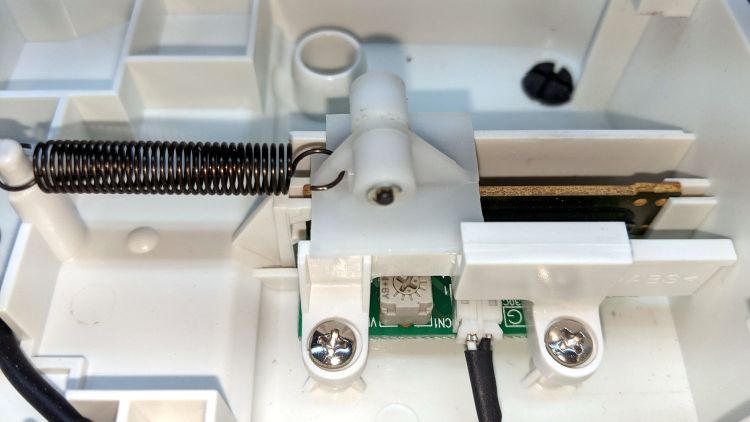
I think the trimpot adjusts the starting resistance for the slider’s speed control travel. It is, comfortingly, roughly in the middle of its range.
A top view shows the fixed 140 kΩ resistor (brown yellow black orange, reading from the right) setting the idle resistance:

Measuring the resistance while gently teasing the slider showed that it’s possible to produce a resistance higher than 20 kΩ and lower than 140 kΩ, although it requires an exceedingly finicky touch and is completely unstable.
Before looking inside the pedal, we thought the cutter was triggered by an actual switch closure with the heel end most of the way downward against those stiff springs, which meant the failure came from a switch glitch. Now, we think the earlier and infrequent uncommanded thread cuts trained Mary to start very carefully to be very sure she wasn’t glitching the cutter’s hypothetical switch. Of course, her gradually increasing toe pressure moved the slider very slowly through its idle-to-running transition: she was optimizing her behavior to produce exactly the resistance required to trigger the cutter.
She now sets the machine’s speed control midway between Turtle and Hare to limit its top speed, presses the pedal with more confidence to minimize the time spent passing through the danger zone, and has had far few uncommanded thread cuts. We think it’s now a matter of retraining her foot to stomp with conviction; there’s no hardware or software fix.
I’m sure Juki had a good reason to select the resistances they did, but I would have gone for a non-zero minimum resistance at the fast end of travel and a zero-resistance switch to trigger the cutter.

Comments
2 responses to “Juki JC-001 Foot Control: Resolving Uncommanded Thread Cutting”
I’ll have to bookmark this; I’m pretty sure Julie has the same model, though her go-to general machine is her venerable Elna. (She has an inexpensive Brother, which gets into the never-to-be-sufficiently-damned category.) I still regret giving up my old Singer-based Japanese machine; it did two things well; forward and backwards.
The Juki does only straight stitching with zero computerization, which is exactly what she needs for piecing & quilting, and, from what we’ve seen, the thing should last approximately forever.
There’s a lot to be said for simple mechanical workings … if only they’d used a foot switch for the thread cutter, she’d be perfectly happy.