Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
A friend gave me a New Old Stock IBM Model M keyboard, built by Lexmark on 1/30/96. Although I intended to try it out, I first showed it to Mary and it immediately ended up at her desk:
IBM Model M 1996 – media keys
I favor off-lease Dell boxes intended for office use, so the PS/2 plug on the end of the (permanently attached) cable slid right into the PS/2 jack on the back panel. Gotta love it.
She’d been hammering out testcases and doc on Model M keyboards basically forever, so her fingers snapped into position and the room sounds like her old IBM office.
The “101 key” layout predates frippery along the lines of multimedia keys, so I gimmicked the top row of the numeric pad to control the mixer volume and muting toggle:
/ ⇒ amixer sset 'Master' 10%-
* ⇒ amixer sset 'Master' 10%+
– ⇒ amixer sset 'Master' toggle
While doing that, I found the semicolon key fired at the slightest touch, so I popped the keycap to see if I could frighten it into compliance:
IBM Model M 1996 – dome switch
Huh.
It seems Lexmark replaced the classic buckling spring mechanism with less clicky rubber dome switches, even back in 1996, perhaps for use in libraries & suchlike. Come to think of it, this place is more like a library than an office, so muted clickiness seems appropriate.
While contemplating all the hocus-pocus and precision alignment involved in the DIY plotter project, it occurred to me you could conjure a plotter from a pair of steppers, two disks, a lifting mechanism, and not much else. The general idea resembles an Rθ plotter, with the paper glued to a turntable for the “theta” motion, but with the “radius” motion produced by pen(s) on another turntable:
Rotary Plotter – geometry 4
The big circle is the turntable with radius R1, which might be a touch over 4.5 inches to fit an 8.5 inch octagon cut from ordinary Letter paper. The arc with radius R2 over on the right shows the pen path from the turntable’s center to its perimeter, centered at (R1/2,-R1) for convenience.
The grid paper represents the overall Cartesian grid containing the XY points you’d like to plot, like, for example, point Pxy in the upper right corner. The object of the game is to figure out how to rotate the turntable and pen holder to put Pxy directly under the pen at Ixy over near the right side, after which one might make a dot by lowering the pen. Drawing a continuous figure requires making very small motions between closely spaced points, using something like Bresenham’s line algorithm to generate the incremental coordinates or, for parametric curves like the SuperFormula, choosing a small parameter step size.
The offset between the two centers is (ΔX,ΔY) and the distance is R2 = sqrt(ΔX² + ΔY²). The angle between the +X axis and the pen wheel is α = atan2(ΔY,ΔX), which will be negative for this layout.
Start by transforming Pxy to polar coordinates PRθ, which produces the circle containing both Pxy and Ixy. A pen positioned at radius R from the center of the turntable will trace that circle and Ixy sits at the intersection of that circle with the pen rotating around its wheel.
The small rectangle with sides a and b has R as its diagonal, which means a² + b² = R² and the pointy angle γ = atan a/b.
The large triangle below that has base (R2 – a), height b, and hypotenuse R2, so (R2 – a)² + b² = R2².
Some plug-and-chug action produces a quadratic equation that you can solve for a as shown, solve for b using the first equation, find γ from atan a/b, then subtract γ from θ to get β, the angle spearing point Ixy. You can convert Rβ back to the original grid coordinates with the usual x = R cos β and y = R sin β.
Rotate the turntable by (θ – β) to put Pxy on the arc of the pen at Ixy.
The angle δ lies between the center-to-center line and Ixy. Knowing all the sides of that triangle, find δ = arccos (R2 – a) / R2 and turn the pen wheel by δ to put the pen at Ixy.
Lower the pen to make a dot.
Done!
Some marginal thinking …
I’m sure there’s a fancy way to do this with, surely, matrices or quaternions, but I can handle trig.
You could drive the steppers with a Marlin / RAMPS controller mapping between angles and linear G-Code coordinates, perhaps by choosing suitable steps-per-unit values to make the degrees (or some convenient decimal multiple / fraction thereof)correspond directly to linear distances.
You could generate points from an equation in, say, Python on a Raspberry Pi, apply all the transformations, convert the angles to G-Code, and fire them at a Marlin controller over USB.
Applying 16:1 microstepping to a stock 200 step/rev motor gives 0.113°/step, so at a 5 inch radius each step covers 0.01 inch. However, not all microsteps are moved equally and I expect the absolute per-step accuracy would be somewhere between OK and marginal. Most likely, given the application, even marginal accuracy wouldn’t matter in the least.
The pen wheel uses only 60-ish degrees of the motor’s rotation, but you could mount four-ish pens around a complete wheel, apply suitable pen lift-and-lower action and get multicolor plots.
You could gear down the steppers to get more steps per turntable revolution and way more steps per pen arc, perhaps using cheap & readily available RepRap printer GT2 pulleys / belts / shafts / bearings from the usual eBay sellers. A 16 tooth motor pulley driving a 60 tooth turntable pulley would improve the resolution by a factor of 3.75: more microsteps per commanded motion should make the actual motion come out better.
Tucking the paper atop the turntable and under the pen wheel could be a challenge. Perhaps mounting the whole pen assembly on a tilting plate would help?
Make all the workings visible FTW!
Some doodles leading up to the top diagram, complete with Bad Ideas and goofs …
Centering the pen wheel at a corner makes R2 = R1 * sqrt(2), which seems attractive, but seems overly large in retrospect:
Rotary Plotter – geometry 1
Centering the pen wheel at (-R1,R1/2) with a radius of R1 obviously doesn’t work out, because the arc doesn’t reach the turntable pivot, so you can’t draw anything close to the center. At least I got to work out some step sizes.
A first attempt at coordinate transformation went nowhere:
Rotary Plotter – geometry 2
After perusing the geometric / triangle solution, this came closer:
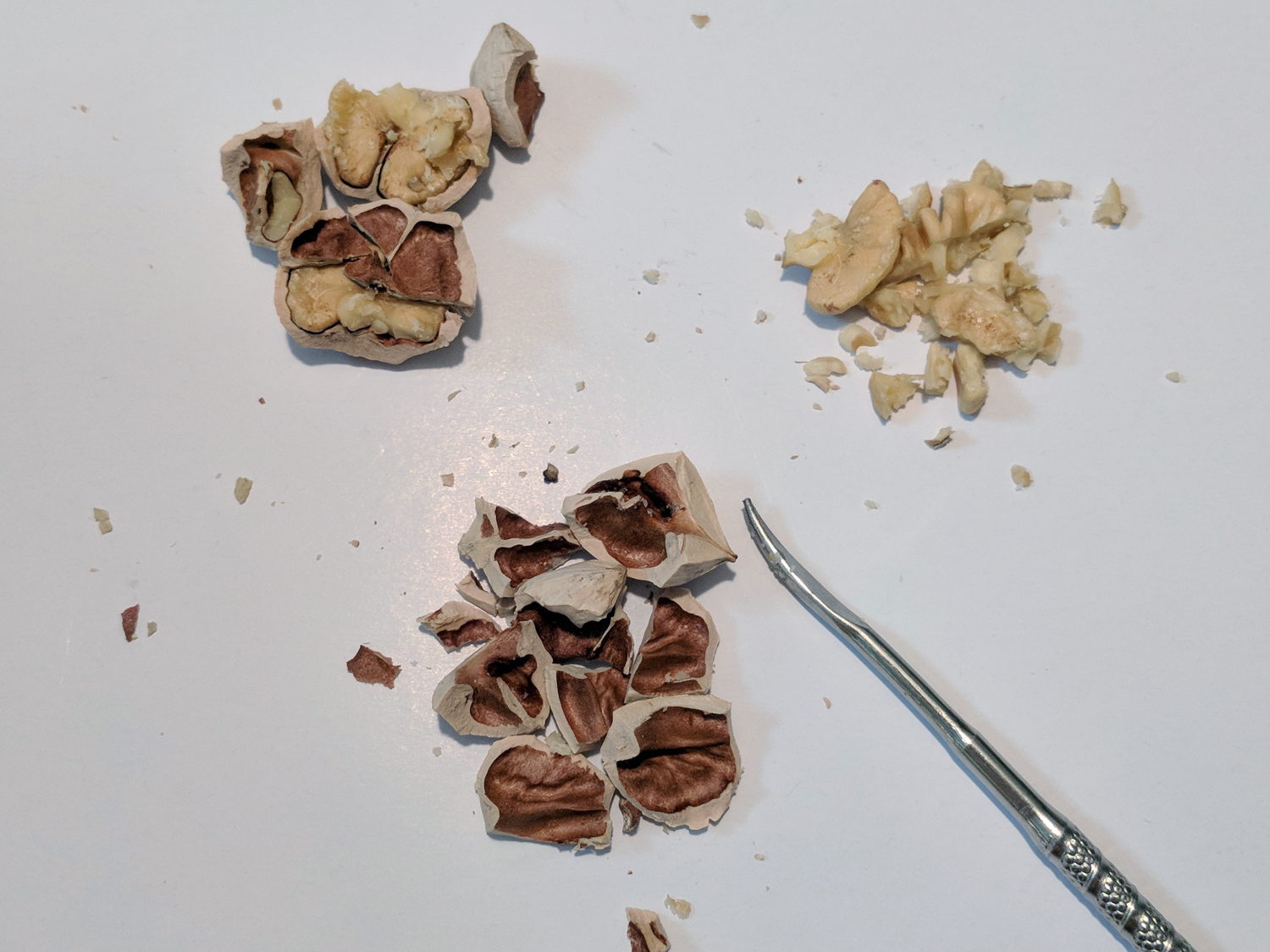
Hickory trees run on a triennial cycle and 2017 produced a huge crop of nuts. My trusty Vise-Grip makes short work of the otherwise impenetrable shells:
Hickory Nuts – cracking in Vise-Grip
A nut pick extracts the good stuff:
Hickory Nuts – cracked
In round numbers, you get twice as much shell as you do nut meat, so there’s plenty of shells left over.
I wrapped 10 ounces of shells in a double layer of aluminum foil, poked two rows of air holes along the package, dropped it holes-up atop the “flavorizer” bars in the propane barbie, and smoked 5 pounds of cured pork belly into some of the finest bacon we’ve ever eaten.
Heated and starved for airinside the aluminum wrapper, the shells became charcoal:
Small wipes made from worn-out cotton t-shirts absorb most shop liquids, don’t overstay their welcome after short projects, and prevent the deep emotional attachment leaving swarf in the clothes washer. Scissors cutting gets tedious, so mooch a rotary cutter and slash away:
T-shirt shop rags
Synthetic fabrics don’t work nearly as well as cotton, so pay attention to the labels.
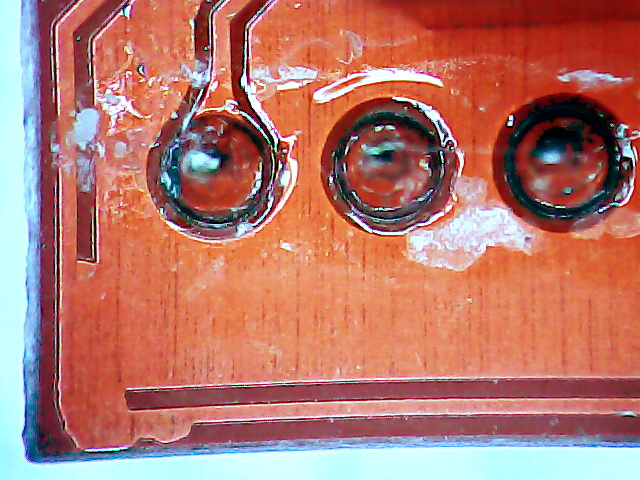
When I plugged the LCD into the RAMPS board, the USB current jumped from 70-ish mA to about 700 mA, which seemed odd. Eventually the problem followed the “Smart Adapter Board”, which has no active components and simply rearranges two pin headers into two ribbon cables, so what could go wrong?
This stared me in the face for a while until I recognized it:
RAMPS 1.4 – Smart Adapter – solder mask failure
Yup, that trace is supposed to run around the corner without merging into the ground plane and, of course, it carries the +5 V power supply to the LCD board. Just another production goof and, I’m certain, the boards don’t get any testing because they’re so simple.
Two cuts, a bit of scraping, a snippet of Wire-Wrap wire, and it’s all good:
RAMPS 1.4 – LCD panel
The white-on-blue display is reasonably legible in person, even if it’s nearly invisible here. Might have something to do with polarization vs. the Pixel’s camera.
Everything else on the LCD board works fine. I set the beep to 50 ms and the tone to 700 Hz, which suit my deflicted ears better than the defaults.
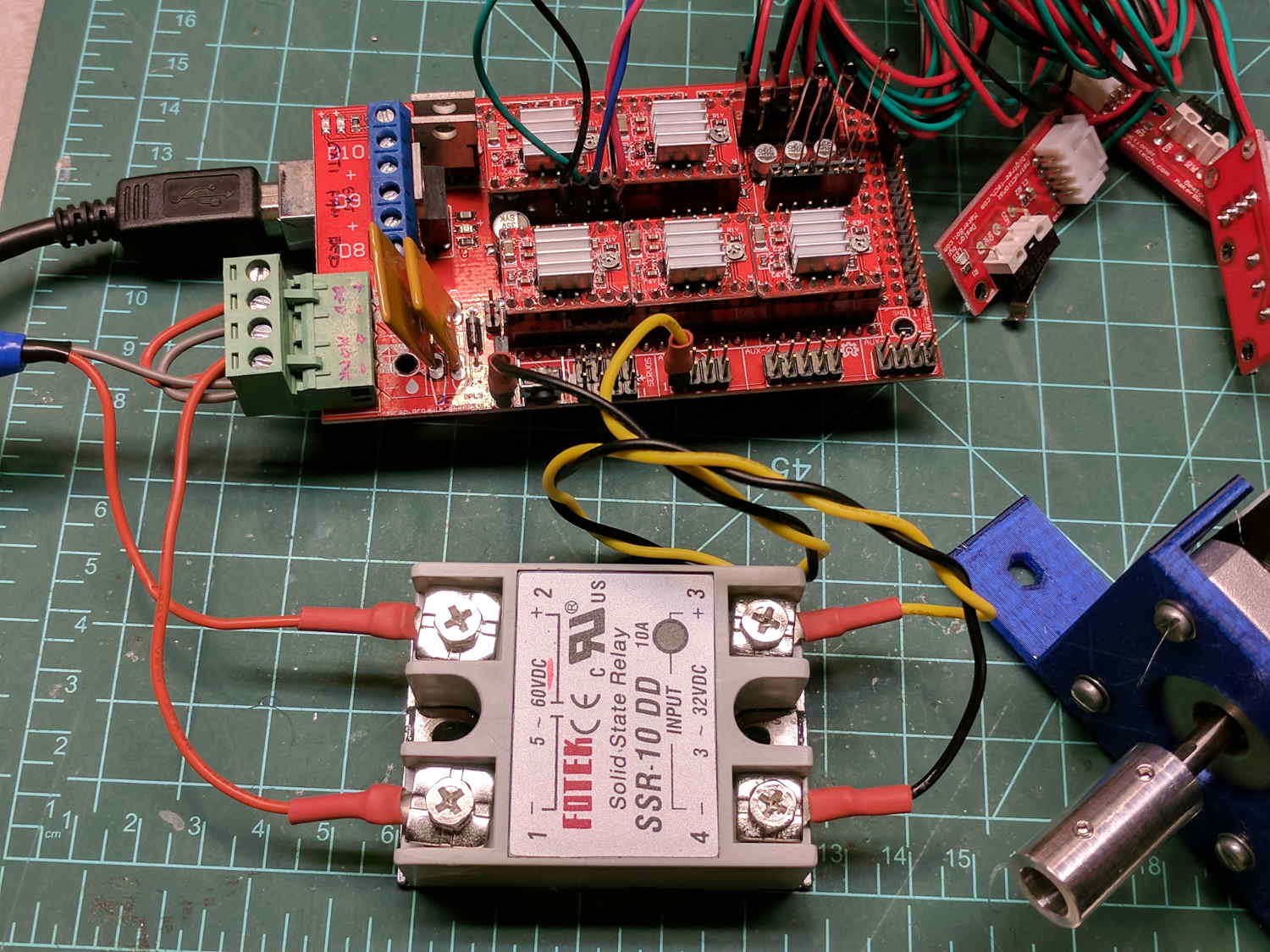
The DC (n.b., not an AC) solid state relay in the foreground switches the 20 V laptop supply brick to the RAMPS shield atop the knockoff Arduino Mega 2560, controlled by the PS_ON pin (black wire), with +5 V from a pin in the AUX header (yellow wire). The SSR includes a ballast resistor limiting the current to 12 mA, with an inconspicuous red LED behind the black dot showing when the output is turned on.
Because it’s a DC SSR, polarity matters: the supply goes to the + terminal, the RAMPS power inputs to the – terminal.
I haven’t applied much of a load to to the SSR, but it works as expected. Define POWER_SUPPLY 1 and PS_DEFAULT_OFF so the boards starts up with the SSR turned off, then use M80 / M81 to turn it on / off as needed.
Remove D1 on the RAMPS board to isolate the Mega power from the +20 V supply. Stuffed as shown, the Mega draws 70 mA from the USB port, although an external 8 V (-ish) supply is always a good idea.
The stepper is a random NEMA 17 from the heap in a mount intended for a DIY plotter. I adjusted the tiny trimpots on all the boards for 400 mA peak = 250 mA RMS into the windings, after finding 250 mApk didn’t produce nearly enough mojo, even for a demonstration:
X Axis Stepper Drive
Just to get it running, I used DEFAULT_AXIS_STEPS_PER_UNIT = 100 step/mm, MAX_FEEDRATE 100 mm/s, and (for lack of anything better) DEFAULT_*_ACCELERATION 1000. Those all depend the torque produced by the motor current, which is still way too low.
The endstops require X_???_ENDSTOP_INVERTING true.
I set the ?_BED_SIZE parameters to a generous 2000, with ?_MIN_POS equal to -SIZE/2 to put the origin in the middle where I prefer it, with a similar setting for the Z axis. Obviously, those numbers don’t correspond to any physical reality.
Three little 100 kΩ thermistors sprout from their header and produce reasonable temperatures, although (being cheap eBay parts) they may not match the Type 4 curve. I don’t have any heaters connected. All the over / under temperature lockouts are disabled, because I don’t care right now.
The G-Code parser wants uppercase command letters, which means I get to press the Caps Lock key for the first time in nearly forever!
The header along the right edge of the board connects to the LCD control board, which is another story.
The diffs for the Configuration.h and Configuration_adv.h files as a GitHub Gist:
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters