Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Well, a picture of plastic on my M2’s platform, anyhow:
Digital Machinist Cover – Winter 2015
I swiped that image from Digital Machinist‘s writeup of the Winter 2015 issue. They run 3D printing articles that are vastly more technical and detail-oriented than the usual glowing PR fluff pieces found elsewhere; I’ve been writing about G-Code and 3D printing for quite a few years now.
They could have used an action shot taken earlier in that sequence, but it doesn’t fit the cover’s vertical layout:
On 12 July 2015, I sent a report to NYSDOT about how the traffic signals at Burnett Blvd / Rt 55 greenlighted opposing traffic when our bicycles were still in the intersection:
Can you increase the minimum green and yellow times on the signals from Burnett Blvd to Rt 55?
The current settings are too short for bicycle traffic making a left turn across six traffic lanes.
The pictures show key points from our ride on 2015-07-10, returning from the Balloon Festival in Poughkeepsie. We took the DCRT around Poughkeepsie, went through Arlington to Rt 376 at Collegeview, then took Rt 376 Red Oaks Mill.
The image sequence numbers identify frames extracted from video files. The Front camera runs at 60 fps and the Rear camera at 30 fps.
The red signals are in the process of turning off in Front 0196.
Burnett at Rt 55 Signal – Front 0196
One second later in Front 0260, the car and our bikes are starting to roll. Given the number of drivers blowing through red signals at full speed, devoting one second to watching for oncoming traffic seems prudent.
Burnett at Rt 55 Signal – Front 0260
The yellow signals are turning on in Front 0633, seven seconds after the green. The car has reached the pedestrian ladder across Rt 55, but we’re still crossing the westbound lanes of traffic. We may not be the fastest riders on the road, but we’re not the slowest, either.
Burnett at Rt 55 Signal – Front 0633
We’ve reached the far side of the intersection in Front 1142, just under 16 seconds from the green.
Burnett at Rt 55 Signal – Front 1142
However, Rear 0408 shows that the opposing signals turned green while we’re still crossing the eastbound lanes of Rt 55. That’s about 15 seconds after the Burnett Blvd signals went green.
Burnett at Rt 55 Signal – Rear 0408
About 2.7 seconds later, Rear 0490 shows cars accelerating across the intersection toward us as we cross the pedestrian ladder. They started rolling immediately after their signal went green; waiting a second isn’t a universal practice.
Burnett at Rt 55 Signal – Rear 0490
Setting the minimum Burnett green to 12 seconds, the minimum yellow to 10 seconds, and the minimum delay from Burnett green to Rt 55 green to 30 seconds would help cyclists (just barely) reach the far side of the intersection before opposing traffic starts rolling.
Also: can you adjust the sensor amplifiers on Burnett to respond to bicycles and mark the coil locations on the pavement in both lanes? That would help us through the intersection during low-traffic-volume times, as our bikes seem unable to trip the signals.
Thanks…
This reply from the NYSDOT autoresponder was all I ever got from them:
Thank you for your inquiry. We will respond to your email message as soon as possible.
On 2 August 2015, I sent a report to NYSDOT about how the traffic signals at Old Post Rd – Spring Rd at Rt 9 greenlighted opposing traffic when our bicycles were still in the intersection:
The minimum green-to-opposing-green signal timing from Old Post Road across Rt 9 to Spring road is about 18 seconds: not long enough for bicycles to safely cross an intersection with eight traffic lanes.
The “Green” picture shows our starting position as the signal turned green: behind the first car in line. There’s another car behind us, which ensures the loop sensor will trip; it does not detect bicycles.
Spring Rd – Rt 9 – 2015-08-01 – Green
The “Yellow” picture shows the signal changing after 12 seconds, with the car from behind us now in the middle of the northbound lanes. We’re still in the middle of the southbound lanes.
Spring Rd – Rt 9 – 2015-08-01 – Yellow
The “Opposing Left Green” from the rear camera, 18 seconds from the first picture, shows green left-turn arrows for Spring Road. The opposing cars began rolling with Mary lined up with the northbound right-turn lane and me lined up with the right travel lane.
Spring Rd – Rt 9 – 2015-08-01 – Opposing Left Green
The car behind blew through the red signal on Old Post Rd; I think that’s why the opposing left-turning cars didn’t start sooner.
In the other direction, I often use the left turn from Spring Rd to southbound Rt 9 to reach the South Road Square strip mall. Similarly short yellow and overall cycle times apply in that direction.
Can you add (at least!) five seconds to the yellow and perhaps ten seconds to the minimum cycle time for both directions? That would help us clear the intersection before opposing traffic starts moving again.
Can you also mark the sensor loop locations in all those lanes so cyclists can find them and adjust the amplifier sensitivity / dwell to respond to bicycles? We’ve lined up atop the quadrupole loop pavement cuts on Old Post Road to no avail, but there’s not even a hint of the loop positions under the new Spring Rd paving.
Thanks…
This reply from the NYSDOT autoresponder was all I ever got from them:
Thank you for your inquiry. We will respond to your email message as soon as possible.
On 6 January 2016, this email message arrived from the same email address that never responded to my reports (emphasis added):
Dear Mr. Nisley:
This is in response to your correspondence regarding your experiences as a bicyclist at the intersections of Route 55 at Burnett Boulevard and Route 9 at Spring Road in the Town of Poughkeepsie, Dutchess County.
The New York State Department of Transportation (NYSDOT) is in the process of investigating alternate detection types and inductance loop patterns that would detect a wider range of vehicles. As alternate detection types are tested and approved, they will be integrated into the next traffic signal upgrade at both intersections. The distance varies based on geometry. The loops are centered in each lane and the front loop is a quadrapole, so there are wires down the middle of the loops.
A new timing program was implemented at Route 9 at Spring Road in August, and the yellow and red clearance times meet the current standards. The timing at Route 55 at Burnett Boulevard is in the process of being updated, and the clearance times will be updated as necessary to meet the current standards. Clearance times are determined based on speed, intersection dimensions, grade, and reaction time and cannot be adjusted. The sensitivity on all loops will also be adjusted, so they are as sensitive as possible without causing cross talk between the loops.
We appreciate and share your interest in making our highway systems safe and functional for all users.
If you have any questions or need additional information, please feel free to contact our Regional Traffic Safety & Mobility Group at (845) 437-3396.
NYSDOT Hudson Valley Region
I don’t regard that date a coincidence; NYSDOT was not responding to my reports. I sent a further note to clarify a few points:
On 01/05/2016 02:18 PM, dot.sm.r08.nysdot wrote: Clearance times are determined based on speed,intersection dimensions, grade, and reaction time and cannot be adjusted.
That seems to mean the times can be adjusted, but you won’t adjust them to allow cyclists enough time to clear the intersection.
We appreciate and share your interest in making our highway systems safe and functional for all users.
So, giving opposing traffic a green light while we’re still in the intersection NYSDOT’s way of “making our highway systems safe and functional for all users”.
Do I understand your statements correctly?
No reply, as I’ve come to expect by now.
I think the emphasis on “meet(ing) the current standards” is how NYSDOT will attempt to defend against claims that road conditions caused or contributed to a car-on-bike collision. I find it surprising that contemporary “standards” would allow greenlighting opposing traffic against bicycles, but perhaps they simply choose a standard that excludes bicycles.
This lamp needs a base for its (minimal) electronics:
Vacuum Tube LEDs – plate lead – overview
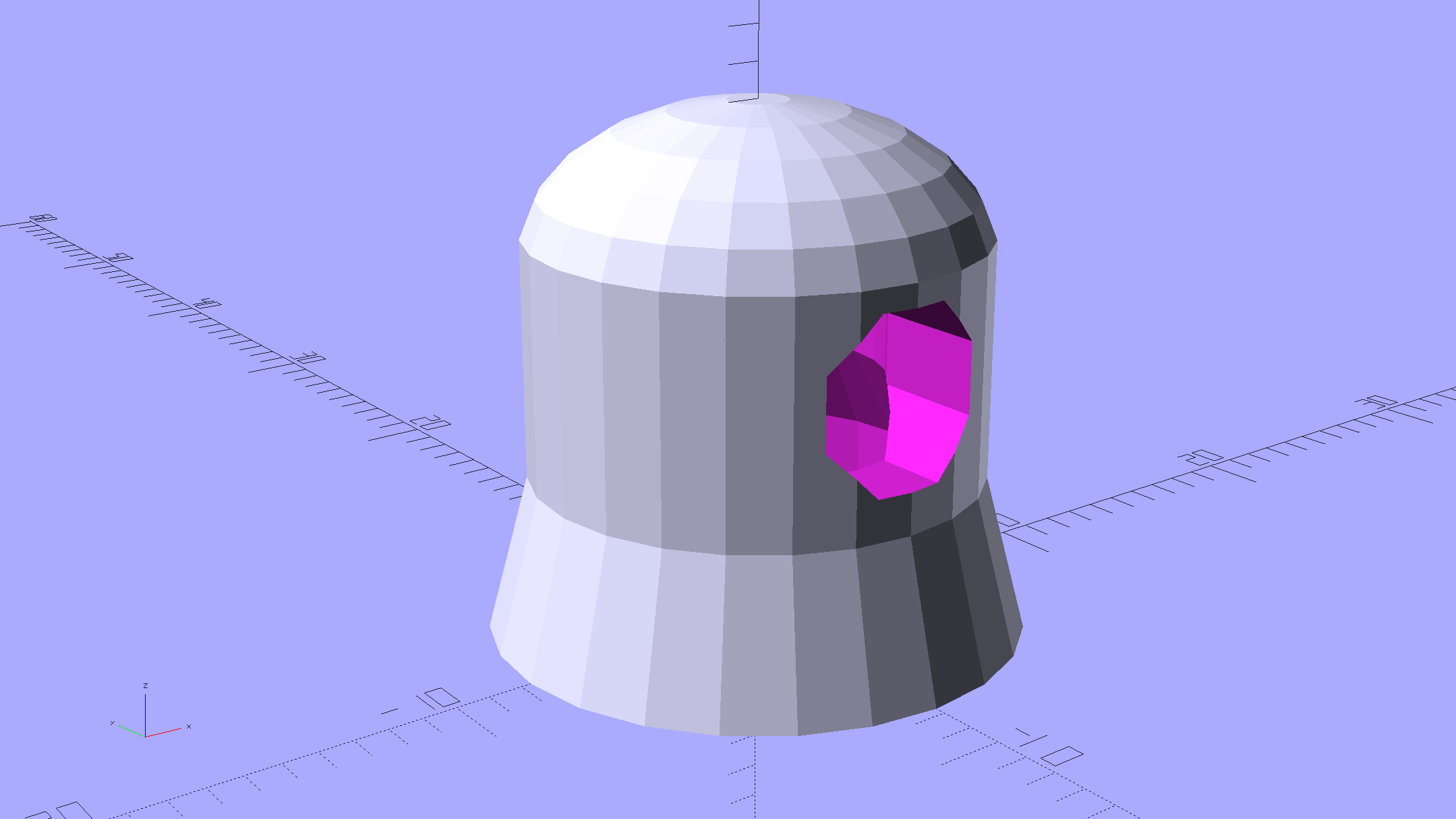
The solid model won’t win many stylin’ points:
Vacuum Tube Lights – lamp base solid model
It’s big and bulky, with a thick wall and base, because that ceramic lamp socket wants to screw down onto something solid. The screw holes got tapped 6-32, the standard electrical box screw size.
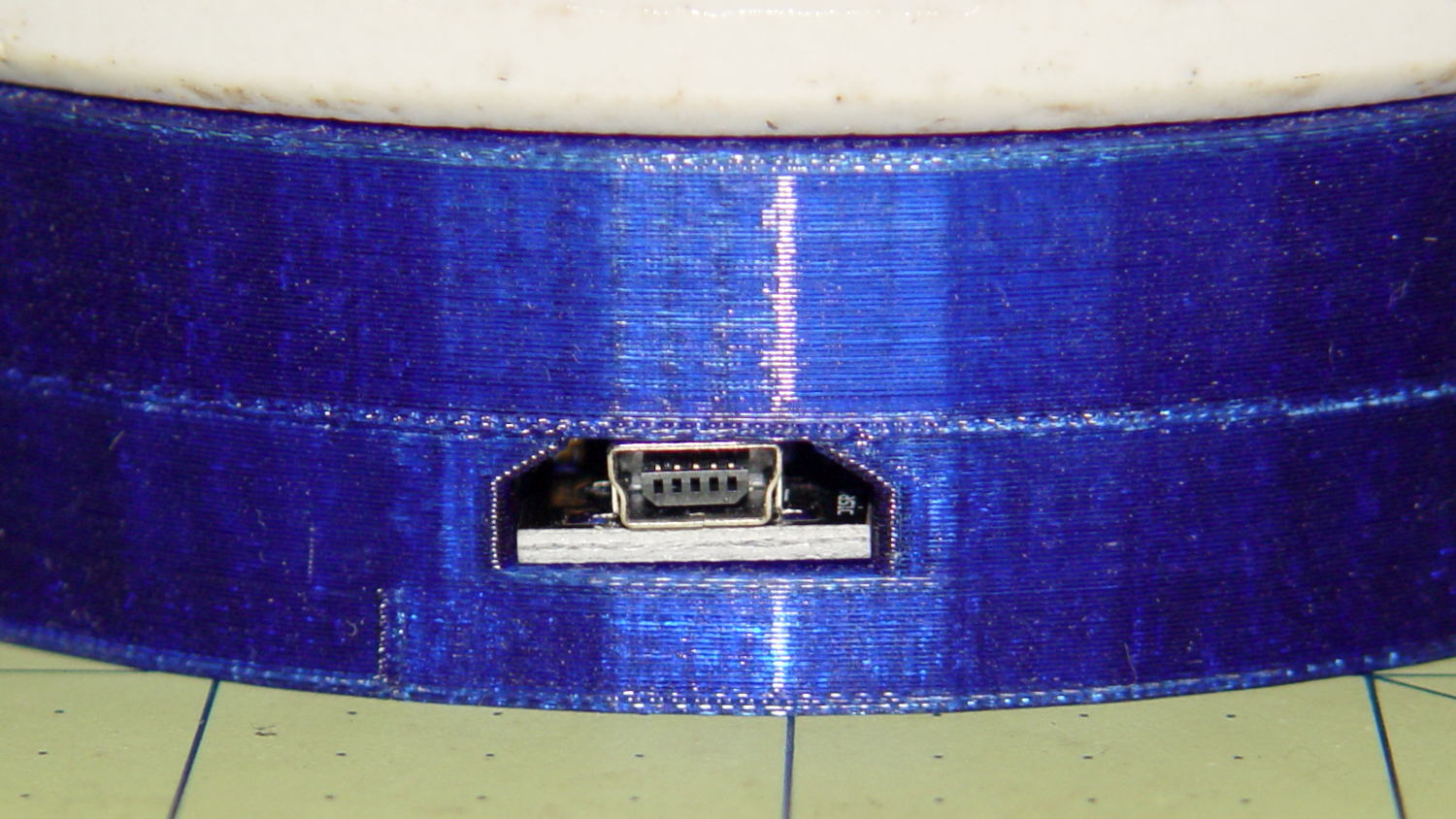
The odd little hole on the far side accommodates a USB-to-serial adapter that both powers the lamp and lets you reprogram the Arduino Pro Mini without tearing the thing apart:
Vacuum Tube Lights – USB adapter cutout
The sloped roof makes the hole printable in the obvious orientation:
Lamp Base – USB port
There’s an ugly story behind the horizontal line just above the USB adapter that I’ll explain in a bit.
The adapter hole begins 1.2 mm above the interior floor to let the adapter sit on a strip of double-sticky foam tape. I removed the standard header socket and wired the adapter directly to the Arduino Pro Mini with 24 AWG U-wires:
Lamp Base – interior
I didn’t want to use pin connectors on the lamp cable leads, but without those you (well, I) can’t take the base off without un-/re-soldering the wires in an awkward location; the fact that I hope to never take it apart is irrelevant. Next time, I’ll use a longer wire from the plate cap and better connectors, but this was a trial fit that became Good Enough for the purpose.
And then It Just Worked… although black, rather than cyan, plastic would look spiffier.
Bluish phases look icy cold:
Vacuum Tube LEDs – halogen lamp – purple phase
Reddish phases look Just Right for a hot lamp:
Vacuum Tube LEDs – halogen lamp – red phase
A ring of white double sided foam tape now holds the plate cap in place; that should be black, too.
The OpenSCAD source code adds the base to the plate cap as a GitHub gist:
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Mary wanted an opening in the front of the Darning Foot I didn’t modify the last time around, so I grabbed it in a machinist’s vise, grabbed that in the bench vise, and freehanded a Dremel slitting saw:
Darning Foot – saw-cut foot
A bit of file work and it looks pretty good, although neither of us like the blurred-from-the-factory red lines:
Darning Foot – opened foot
This one retains the pin that lifts it as the needle rises, so it’s a hopping foot.
A single (knockoff) Neopixel hovers over a defunct halogen bulb:
Vacuum Tube LEDs – plate lead – overview
The Arduino code comes from stripping down the Hard Drive Platter Mood Light to suit just one Neopixel, with the maximum PWM values favoring the red-blue-purple end of the color wheel:
Unlike the Mood Light’s dozen Neopixels jammed into the platter’s hub ring, running one Neopixel at full throttle atop the tube doesn’t overheat the poor controller. In a 22 °C room, PWM 255 white raises the cap’s interior temperature to 35 °C, which looks like a horrific 40 °C/W thermal coefficient if you figure the dissipation at 300 mW = 5 V x 60 mA.
Feeding those parameters into the raised sine wave equation causes the cap to tick along at 27 °C for an average dissipation of 120 mW, which sounds about right:
113 mW = 5 V x (20 + 20 + 5 mA) / 2
The effect is striking in a dark room, but it’s hard to photograph; the halogen capsule inside the bulb resembles a Steampunk glass jellyfish:
Vacuum Tube LEDs – plate lead – detail
That ceramic light socket should stand on a round base with room for the Arduino controller. I think powering it from a wall wart through a USB cable makes sense, with a USB-to-serial converter epoxied inside the box for reprogramming.
It looks pretty good, methinks, should you like that sort of thing.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Lighting up that old voltage regulator tube conclusively demonstrated there’s no point in conjuring high voltages in this day & age. Nay, verily, merely lighting the filament of some tubes would require more power than seems reasonable.
With only a slight loss of historical accuracy, one could light the tube from the top with a Neopixel LED tucked into a similar cap, with power-and-data arriving through a suitably antiqued flying lead. That won’t work on tubes like that 1B3GT with an actual plate terminal at the top, nor with small Noval / miniature 7-pin tubes topped with an evacuation tip, but it’s fine for tubes like this 6SN7GTB:
6SN7GTB Vacuum Tube
Obviously, you want a relatively small cap atop the tube, lest the LED visually overwhelm the tube. Some preliminary tests (a.k.a. screwing around) showed that the mica spacer holding the dual triode elements together lights up wonderfully well and diffuses the glow throughout the tube.
Some PET braid tucked into a snippet of brass tubing dresses up a length of what might once have been audio cable. The braid wants to fray on the ends; confining it with heatstink or brass tubing is mandatory.
That’s a 1 µF ceramic SMD cap soldered between the +5 V and Gnd traces, atop a snippet of Kapton tape, in the hopes that it will help the 100 nF cap (on the other side of the board) tamp down the voltage dunks from PWM current pulses through that long thin wire. The leads come off toward the center to bend neatly upward into the cap.
Duplicating that old plate cap on the 1B3GT would be a fool’s errand, so I went full frontal Vader:
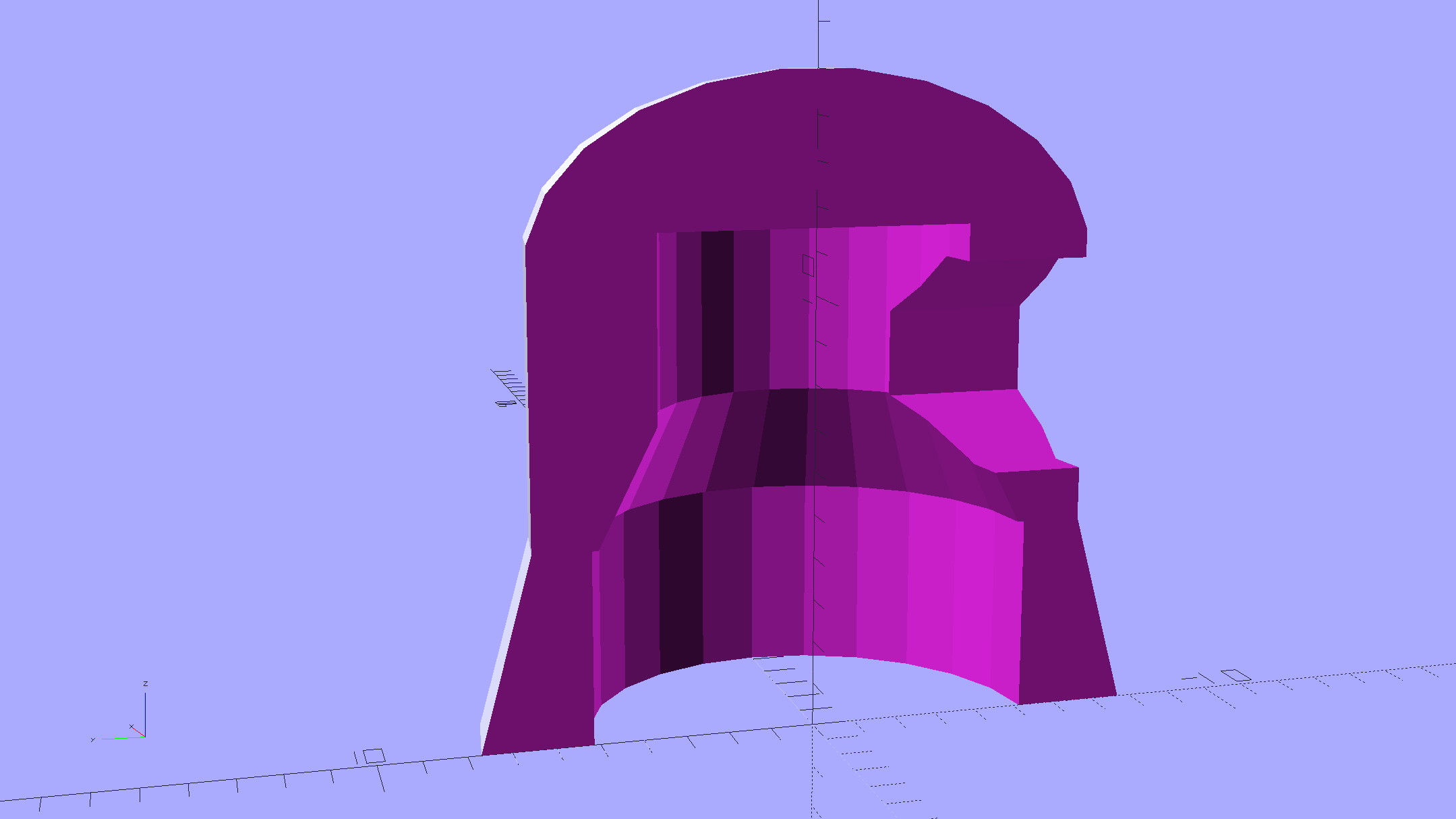
Vacuum Tube Lights – cap solid model – Overview
The interior recesses the LED far enough to allow for the tube’s top curvature, with a conical adapter to the smaller wiring channel that allows for more plastic supporting the brass tube:
Vacuum Tube Lights – cap solid model – section
A glob of epoxy inside the cap anchors the PCB and fuses all the loose ends / floppy wires / braid strands into a solid block that will never come apart again.
It should be printed (or primered and painted) with opaque black or maybe Bakelite Brown, but right now I have cyan PETG and want to see how it plays, soooo:
Vacuum Tube LEDs – plate lead – overview
The cap floats in mid-air over a defunct Philips 60 W halogen bulb that I’ve been saving for just such an occasion. Obviously, you must epoxy / glue the cap in place for a permanent display.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This being the Association for Computing Machinery, I will talk a bit about the Superformula that makes it all possible:
Gielis Superformula – parameters
The presentation will look a lot like this: ACM – Plotting Like Its 1989. The PDF doesn’t include my patter, but perhaps the linky love on each screen can fill in the details.
If you’re following along, the Python source code running on the plotter as a GitHub Gist:
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters