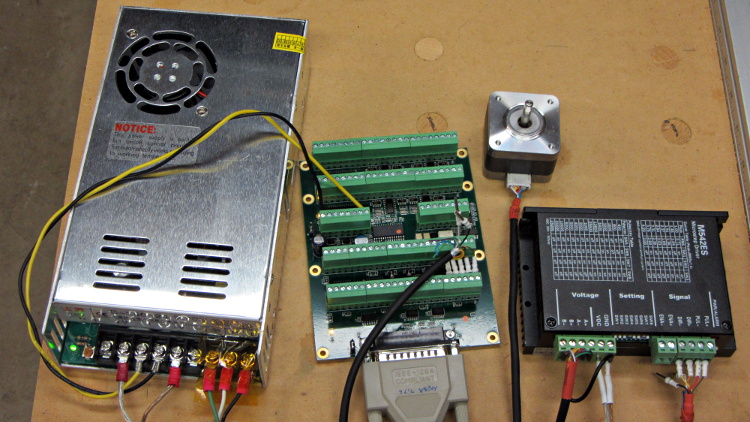
The cables with their tidy terminations make it a little neater, but all this stuff really needs a permanent home:
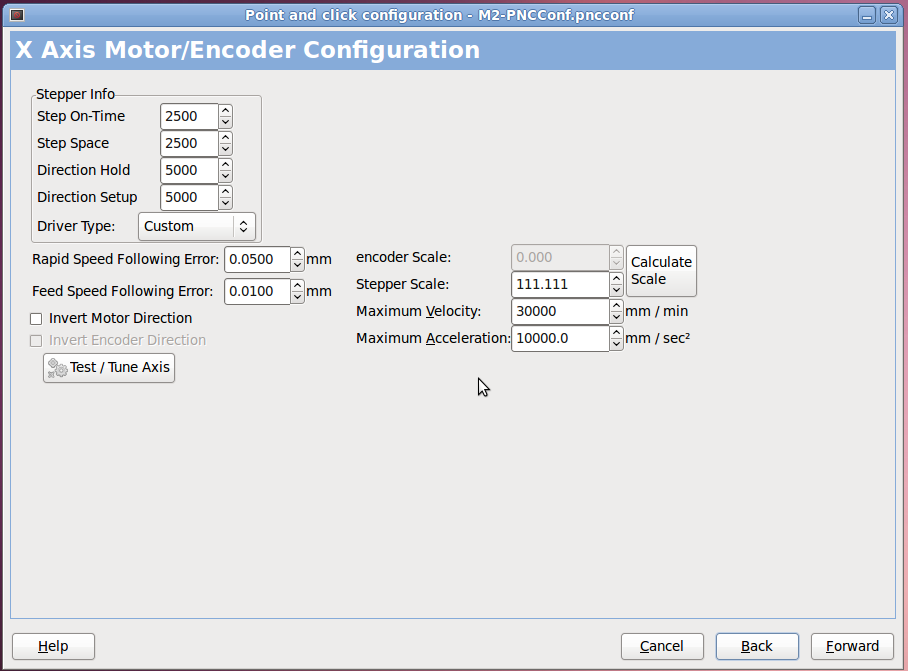
I used the LinuxCNC PNCConf utility to define a minimal system with little more than the X axis parameters filled in:
Then I could jog the stepper motor using the Axis UI:
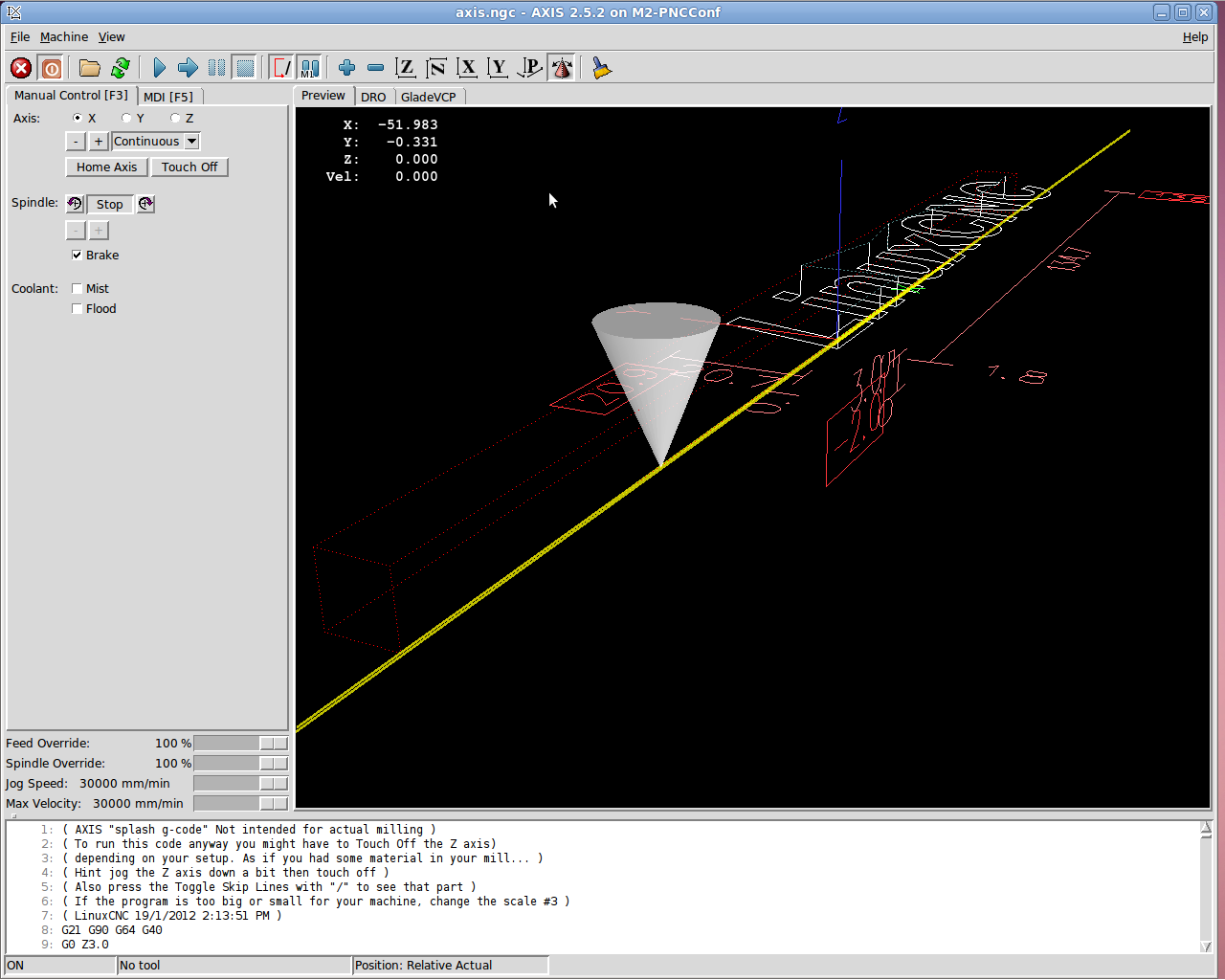
And it worked!
Actually, it didn’t. The first motion instantly tripped a Following Error, so I bumped those values up a bit. Then I fiddled with accelerations and speeds and suchlike. Then I adjusted the Axis defaults to not be so nose-pickin’ slow. And then it Just Worked.
Not much to show, but at least I know the whole LinuxCNC to 5i25 to 7i76 to M542 to motor chain functions pretty much as it should, which is worth knowing. From here on out, it’s a matter of fine tuning…

Comments
5 responses to “Mesa 7i76 vs. Stepper Motor: First Motion”
Do you ever sleep?
Repeatedly and with great enthusiasm! [grin]
I’ve always advocated Power Napping in the afternoon, too, even if milk-and-cookies has become a rare treat.
Admittedly, not having to Go To Work helps a lot…
Yeah, retirement is usually a great boon for productivity. [grin] What I end up working on may not match what I thought I’d be working on, but that just makes it interesting.
FYI: First dust on the Oneida Air cyclone. This was table saw dust, but the barrel got the dust and almost nothing made it to the shop vac. The real test will be when the system is hooked up to the sander. I have a small mountain of reclaimed cedar that wants to be patio furniture. Clouds of fine dust if I don’t collect it, and I had to clean the filter in the vac every 20 minutes last time.
Like today’s project: washing / rescraping / priming the garage door… my heart’s not in the job, alas.
Sounds like you (and the cyclone) know what you’re doing!
[…] « Mesa 7i76 vs. Stepper Motor: First Motion […]