Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Category: Science
If you measure something often enough, it becomes science
Seen with the shock cord in place, it’s obvious that combining moderately high temperature with steady compression sufficed to bend the PETG enough to pop those tabs loose from the vent.
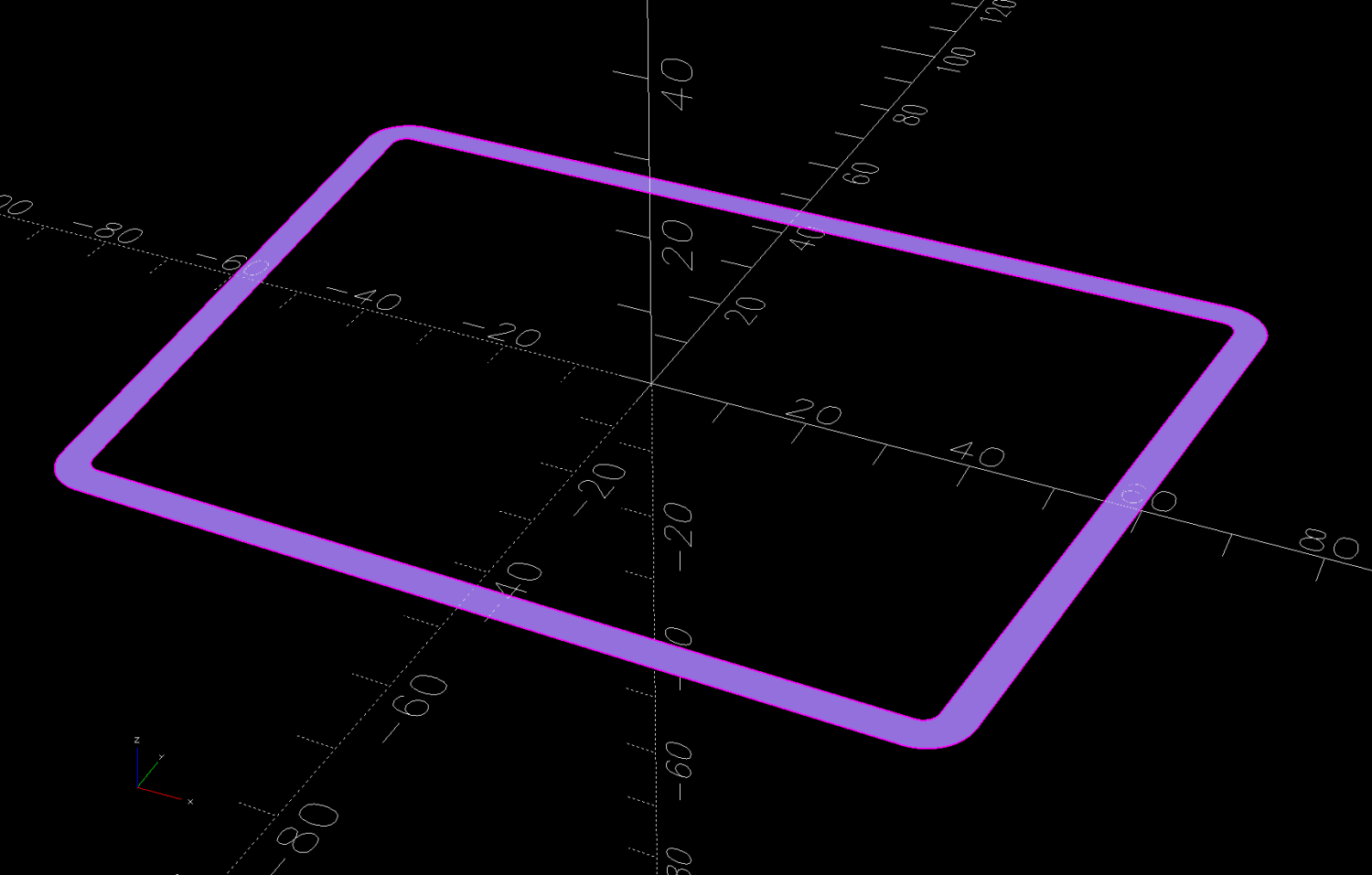
So the OpenSCAD model now produces a stiffening ring to be laser-cut from acrylic:
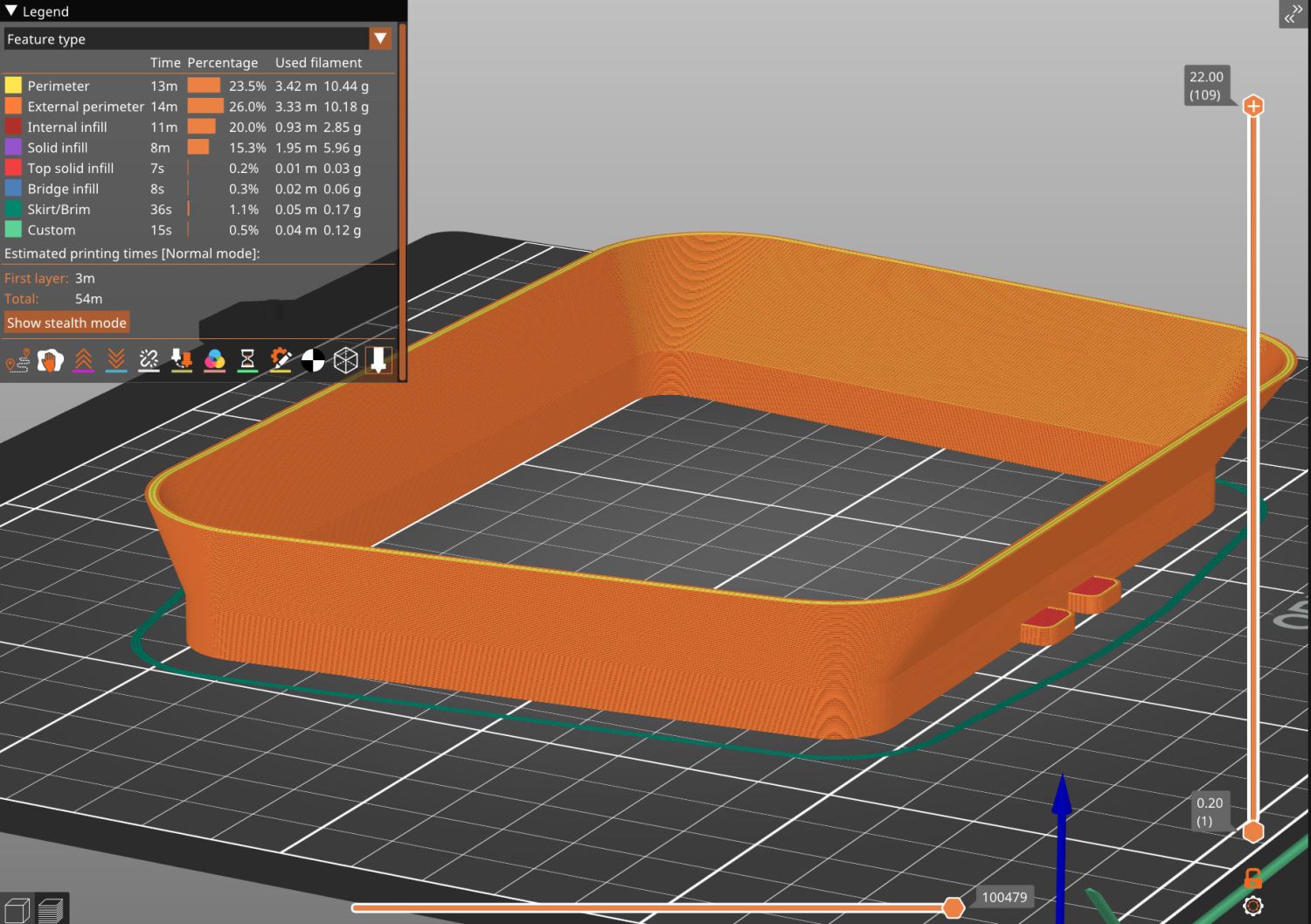
The whole snout builds as a single unit in the obvious orientation:
Clothes Dryer Vent Filter Snout – V2 – slicer
Because the part of the snout with the tabs is 7 mm tall, I glued a 4 mm acrylic ring to a 3 mm ring, with both of them glued to the snout:
Clothes Dryer Vent Filter Snout – acrylic gluing
That’s “natural” PETG, which I expected to be somewhat more transparent, but it’s definitely not a dealbreaker.
Mary will sew up another cheesecloth filter and we’ll see what happens to this setup.
As the saying goes, “Experience is what you get when you don’t get what you want.”
Fortunately, living in the future makes it easy to iterate on the design & implementation until experience produces what should have been obvious at the start.
The white PETG filament started out at 39 %RH and 50 g of silica gel dragged it down to 23 %RH after a three days: still unusually high.
The beads weighed 54.6 g, a weight gain of 9 %, which is about as much as they’ll take. I replaced them with 50 g of new-from-the-bottle beads and the meter dropped to 14 %RH overnight.
Running the tiny fan for another day made no difference:
Polydryer Box desiccant tray – fan
Thereby confirming my suspicion that air circulation inside the box isn’t nearly as much of a problem as I expected.
So filament need not arrive bone-dry and, with enough surface area exposed to the air, silica gel beads can adsorb their limit of water vapor in a day or two.
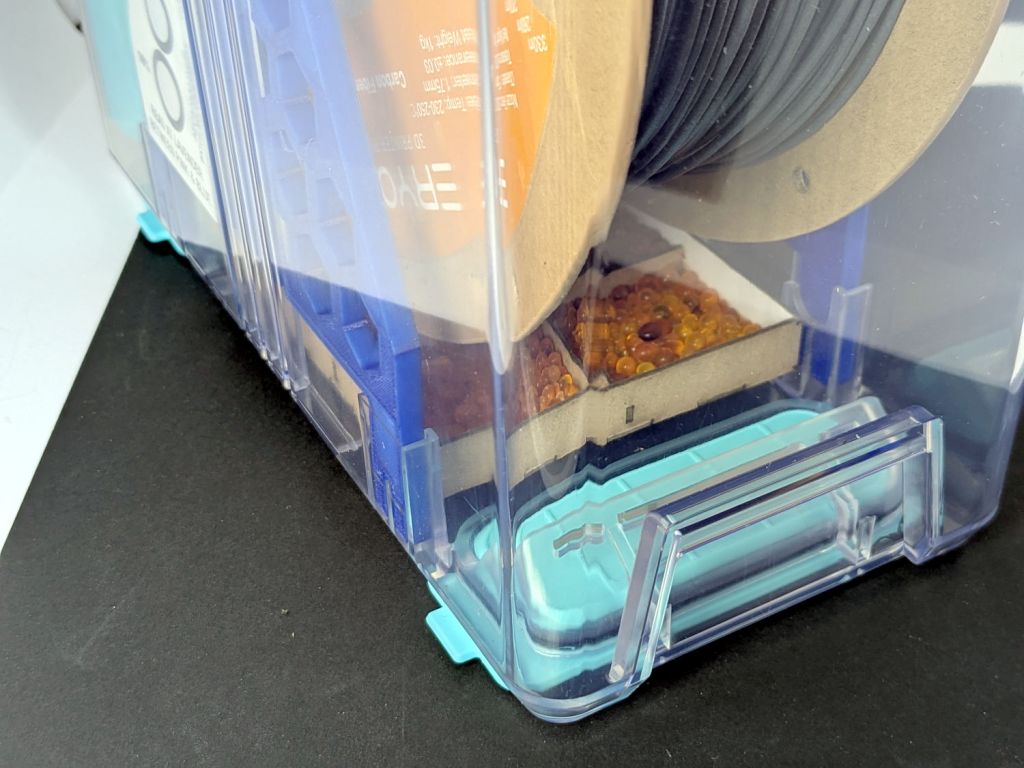
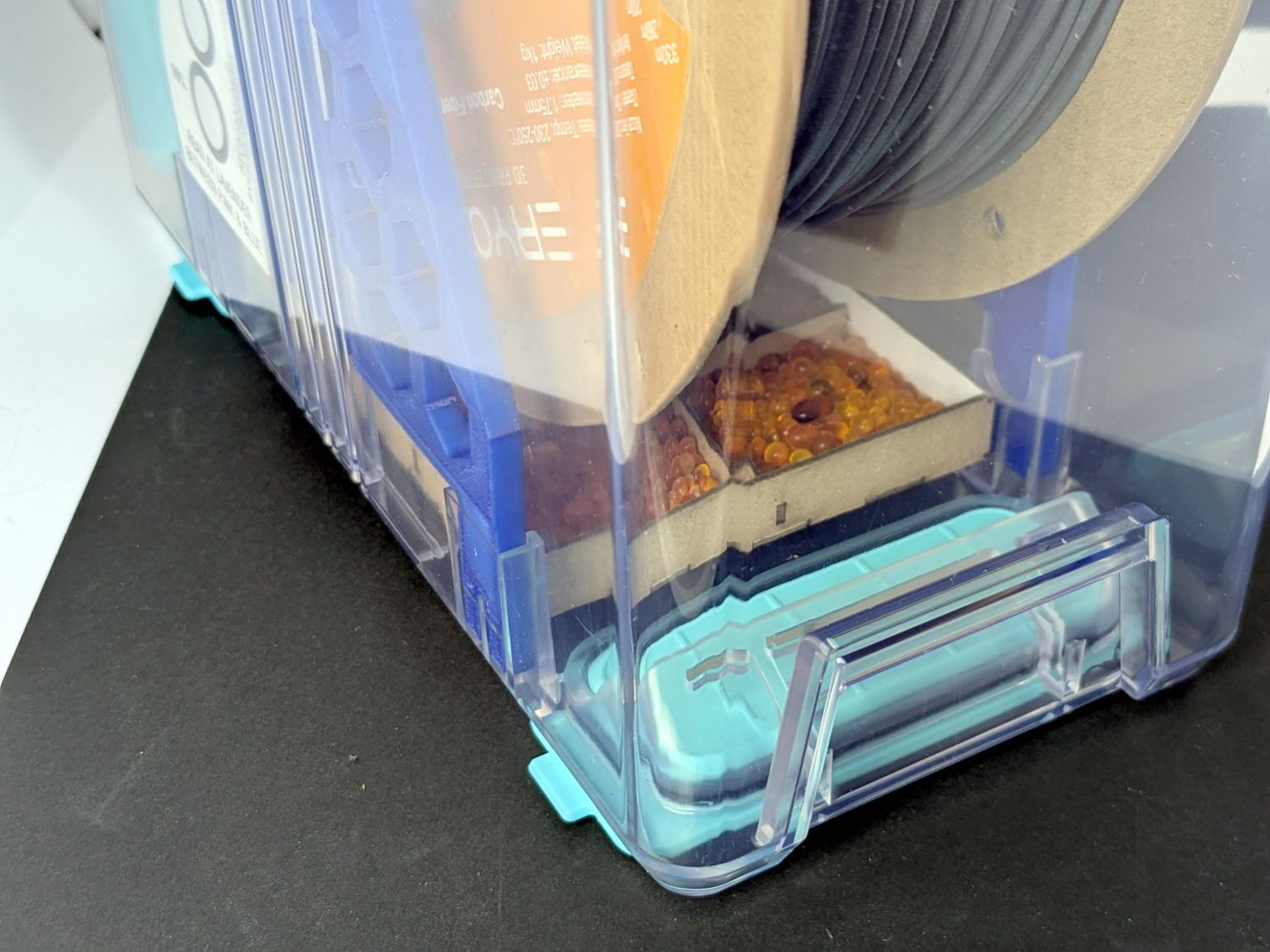
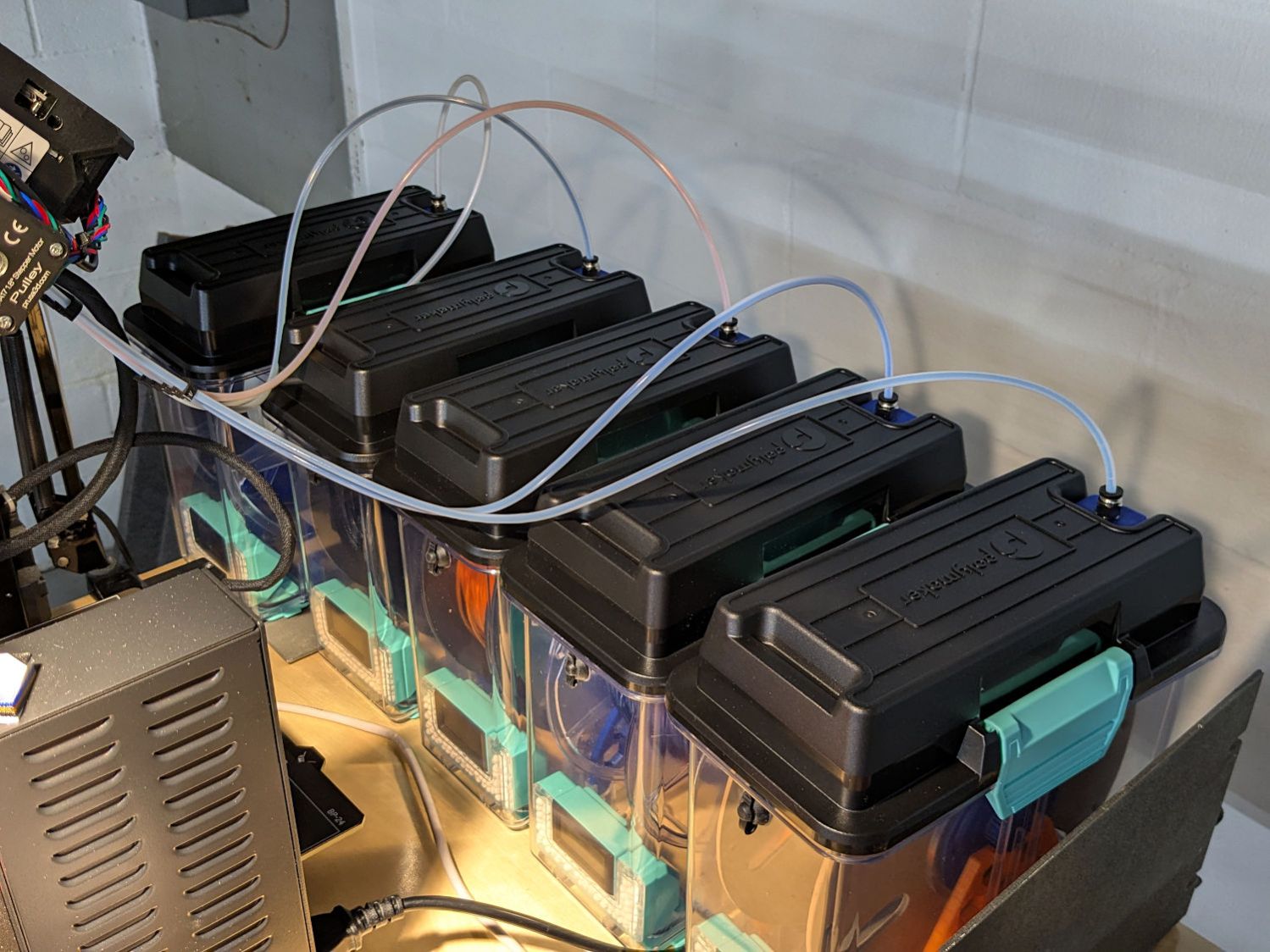
All the boxes now have filament spools and 50 g of silica gel divided equally between the humidity meter and the tray in the bottom of the box:
Polydryer Box desiccant tray – installed
The PETG White in the first row is the new spool loaded last month. I think the 39 %RH indicates the spools do not necessarily arrive bone-dry in their vacuum-sealed bags with a tiny desiccant packet.
Conversely, both the PETG Clear and TPU K filaments are new spools that seem reasonably dry out of their bags.
The auto-rewind spindle in the PETG Orange filament hasn’t been working quite right, so I opened the box a few times. It now has a new PETG-CF spindle.
Having used desiccant in tea bags inside the PolyDryer boxes with some success, I wanted to see what happens with more exposed surface area:
Polydryer Box desiccant tray – installed
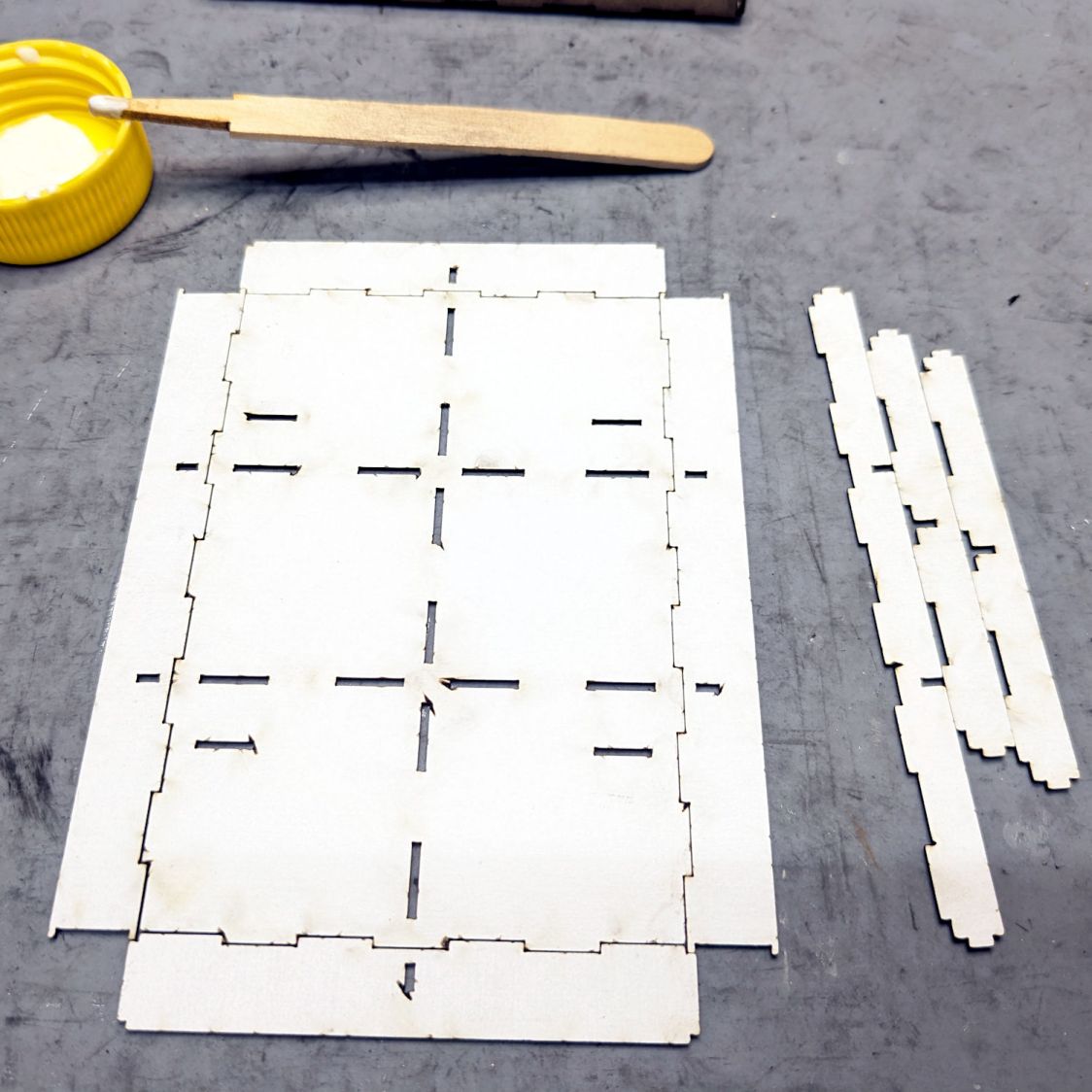
The tray (jawbreaker boxes.py URL) is 2 mm chipboard with a quartet of additional notches fitting the protrusions in the bottom of the Polydryer box:
Polydryer Box desiccant tray – assembly
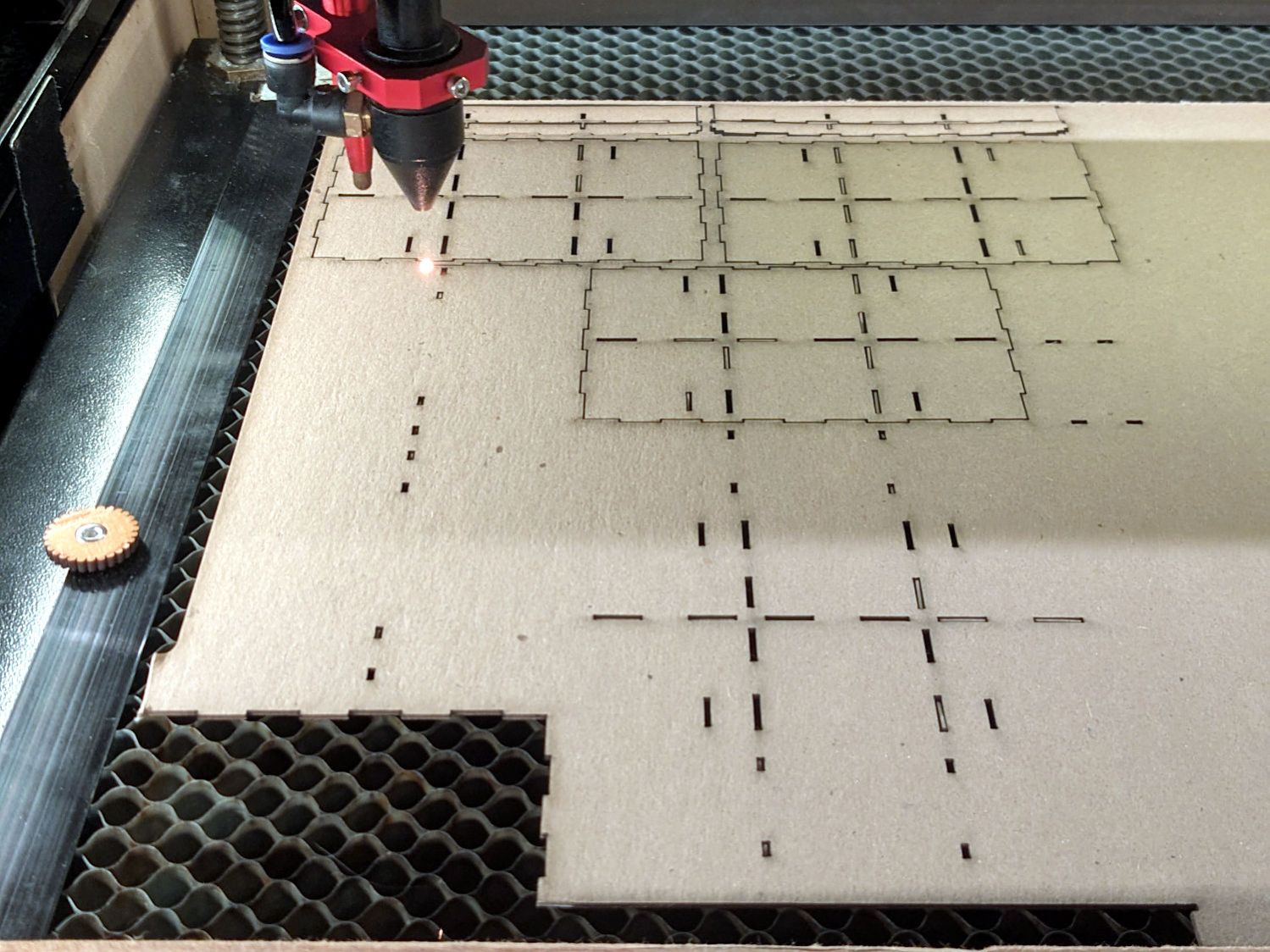
Although you’ll find plenty of printed trays, many with ingenious perforated lids, this was quick & easy:
Polydryer Box desiccant tray – cutting
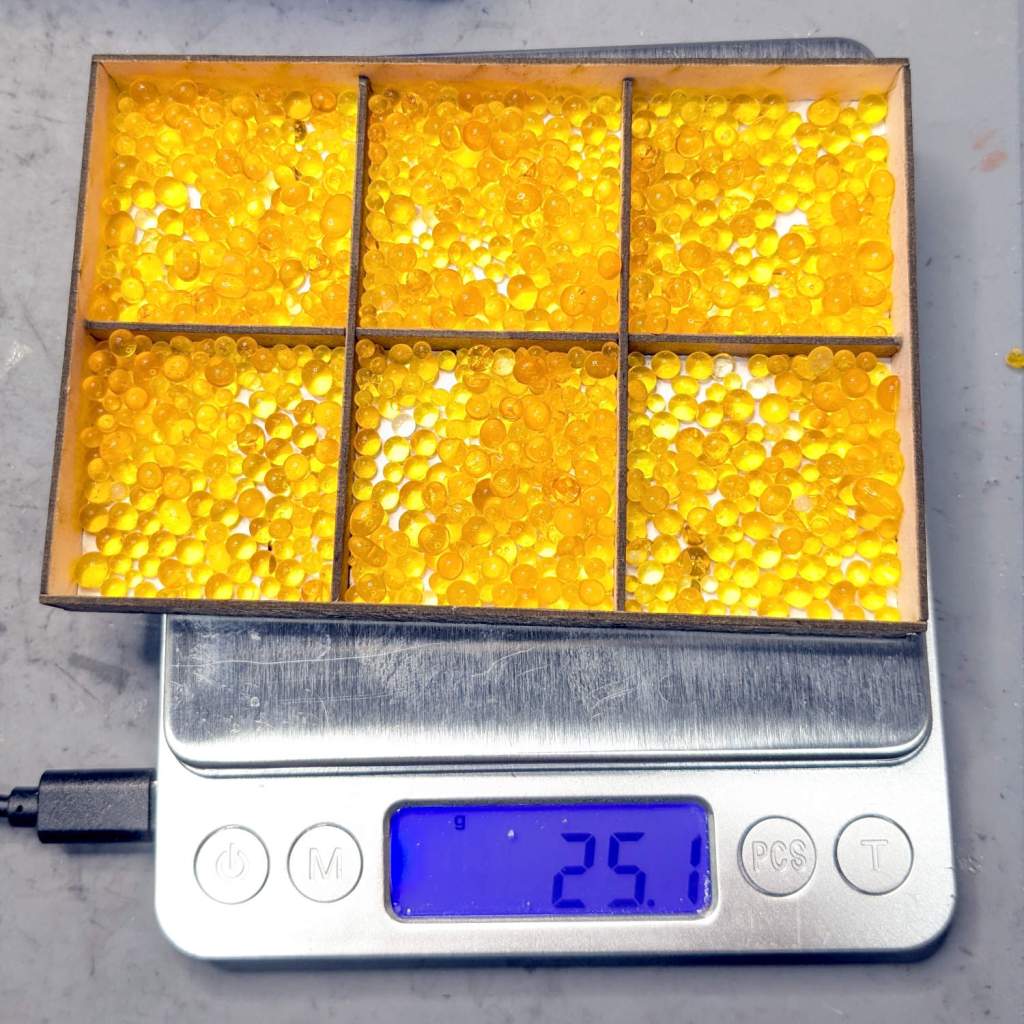
They’re painfully prone to dumping their contents, despite the dividers which are intended to dissuade the beads from taking collective action and surging over the slightly higher outer walls. Fortunately, the dump occurs inside a sealed box and is entirely survivable.
Distributing 25 g of silica gel neatly fills the sections:
A few weeks ago, the house seemed unusually warm when I crawled out of bed. Checking the heat pump thermostat woke me right up:
Heat pump – battery critical
This, as they say, is not a nominal outcome.
A pair of AA alkaline cells powers the thermostat and, due to its wireless communication link to the heat pump’s air handler in the attic, it chews through two pairs a year. As you’d expect, it displays a “Battery Low” message for at least few days at the end of their lifetime, which was not the case for this failure.
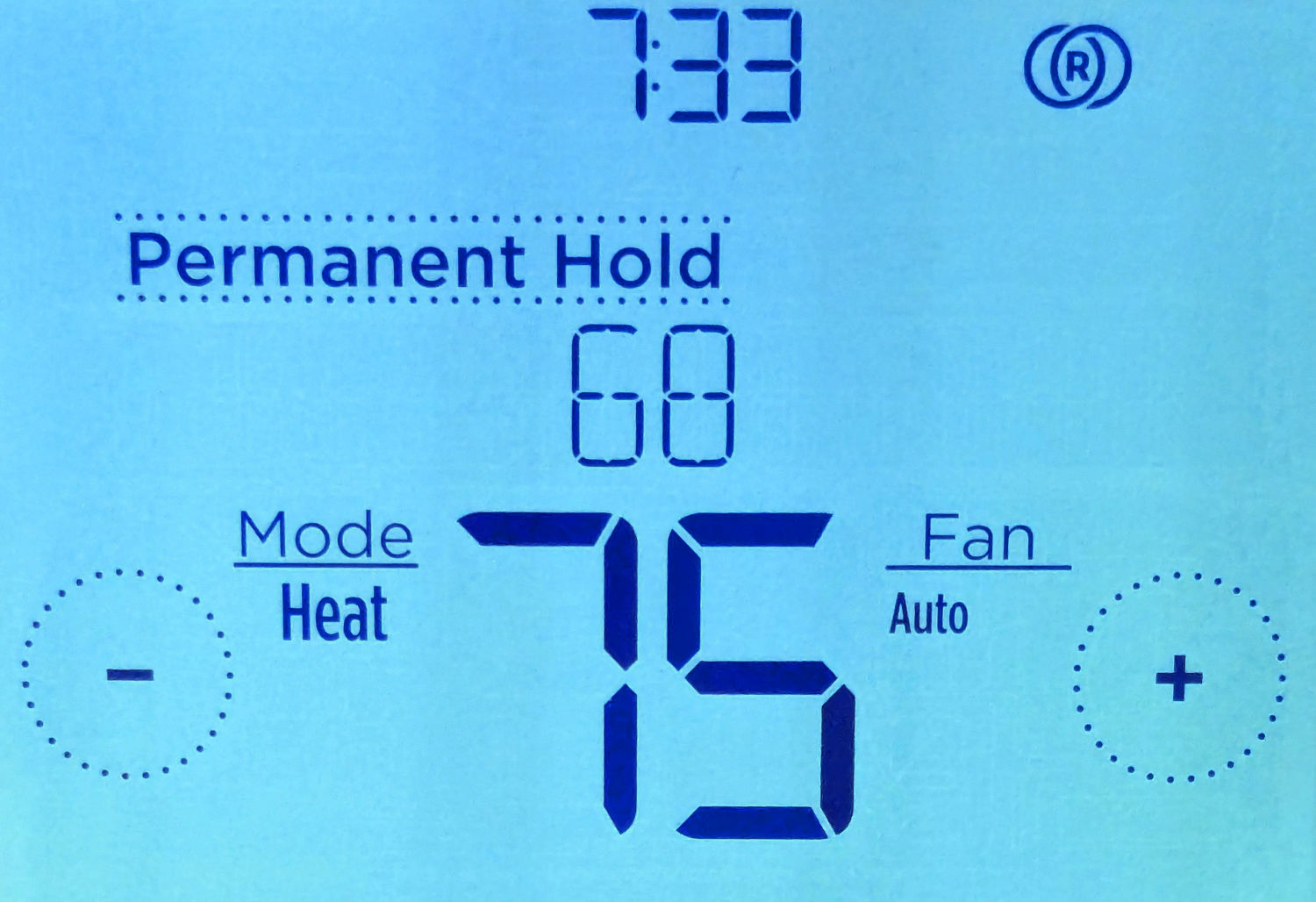
After replacing the cells, the thermostat reported that, yes indeed, the house was much warmer than usual:
Heat pump – high temperature
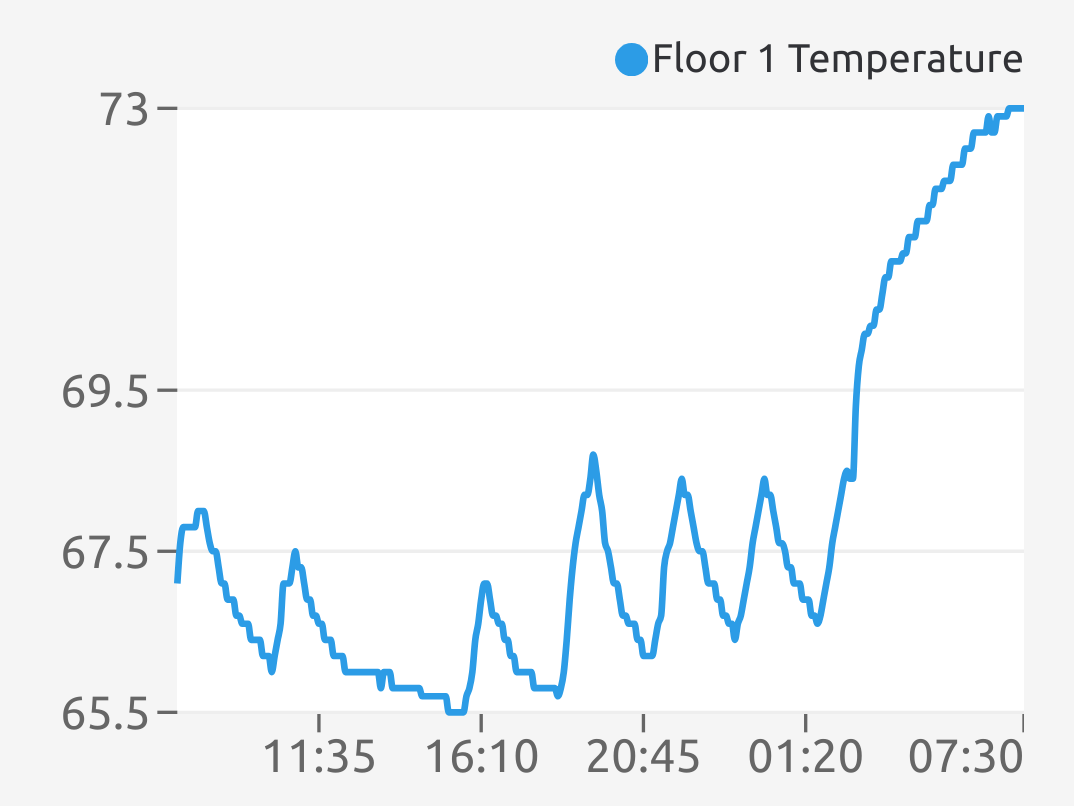
A temperature monitor showed the heat had jammed on in the deep of the night:
Heat pump – runaway temperature
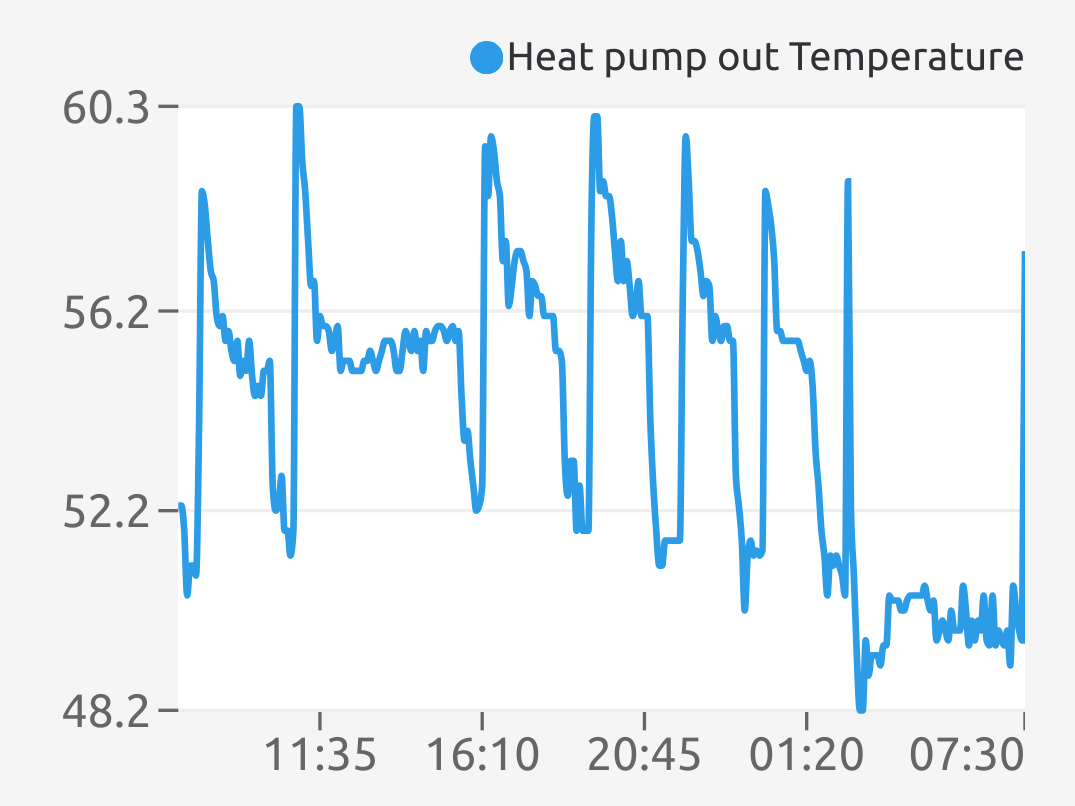
The heat pump exhaust temperature showed a similar event:
Heat pump – exhaust temperature
One of the AA cells showed about 1.3 V, but the other was around 0.25 V, suggesting an abrupt failure, rather than the normal gradual voltage decrease with plenty of time to replace the cells.
It’s reasonable to jam the heat on when the thermostat isn’t communicating, rather than let the house gradually freeze, but it did come as a surprise. I don’t know how the heat pump reacts to a battery failure during the cooling season; not refrigerating the house would be perfectly fine in most circumstances.
The Amazon Basics AA cells I’ve been using have worked as well as the Name Brand ones, so I was willing to write one off as happenstance.
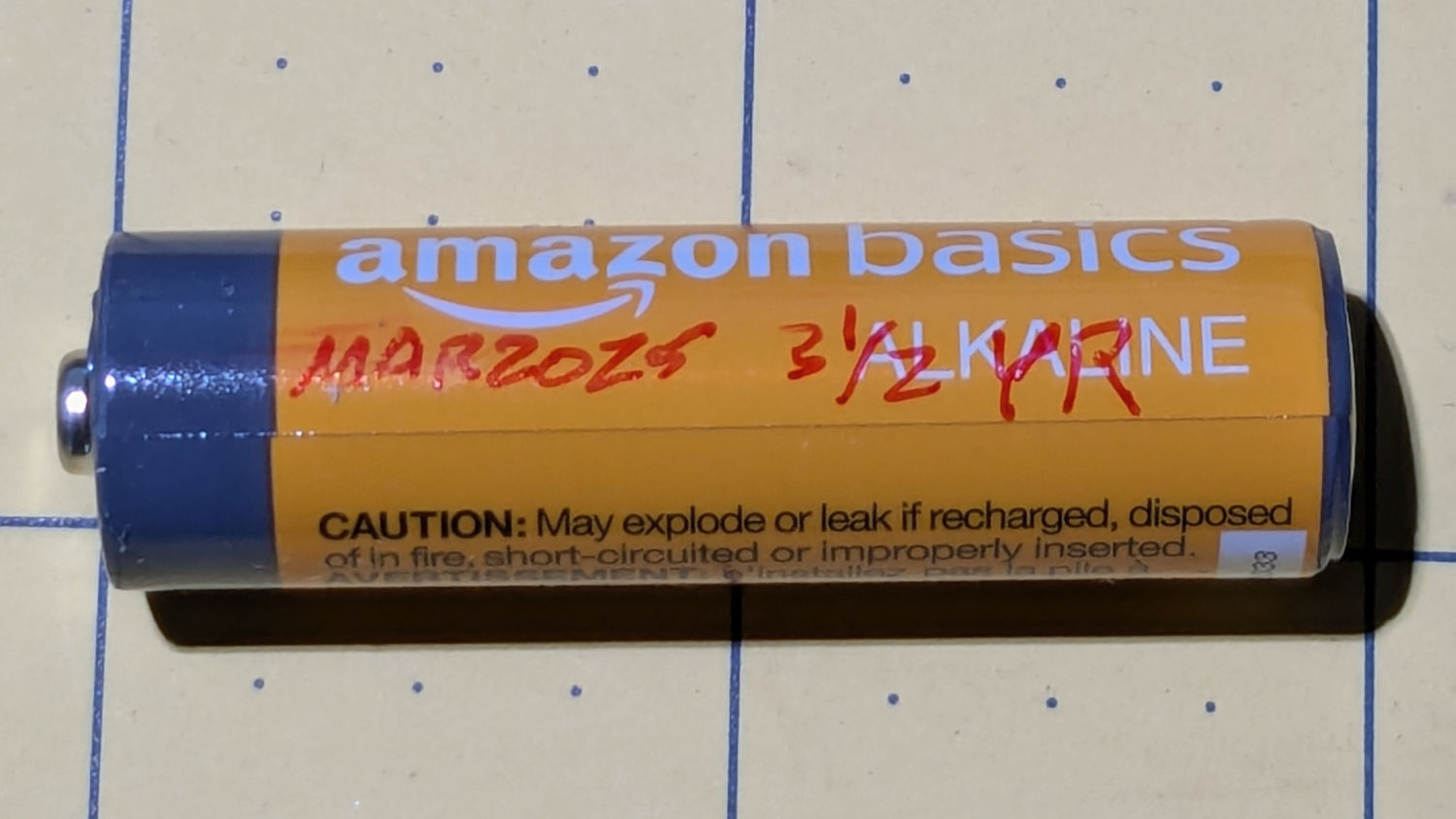
However, during the recent Daylight Saving Time dance, I discovered the clock in Mary’s Long Arm Sewing Room had stopped, with an Amazon Basics AA alkaline cell from the same lot inside:
Failed clock AA cell
The date shows I’d replaced it in March, with the previous cell lasting an amazing 3-½ years. This one was completely dead, reading barely 0.1 V, after seven months. Mary hasn’t had a quilting project at the long-arm stage in recent months, so the clock may have been stopped for quite a while.
Perhaps something has gone badly wrong with Amazon’s battery supplier QC.
As the saying goes: Once is happenstance. Twice is coincidence. Three times is enemy action.
The “PETG White” spool in the top line is nearly empty, so I loaded a new spool into the “Empty 1” box.
The “Empty 1” 35% value on 7 Oct matches the other empty box, the desiccant having pulled the humidity down from the 51% basement level. The weight of the water pulled out seems low compared to “Empty 2”, as they both started with a fresh batch of basement air while changing the desiccant in September.
They’re again filled with 25 g of alumina beads, although I’m beginning to think silica gel does a better job.
A picture of the boxes, thus avoiding WordPress reminding me pictures improve SEO:
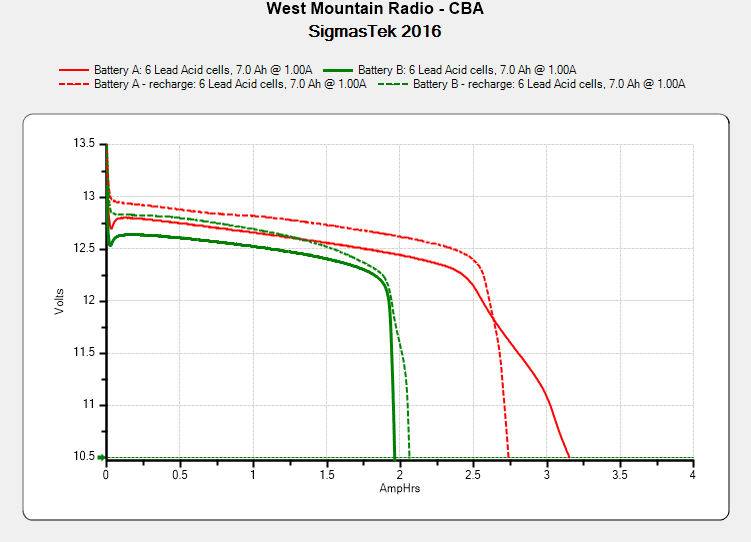
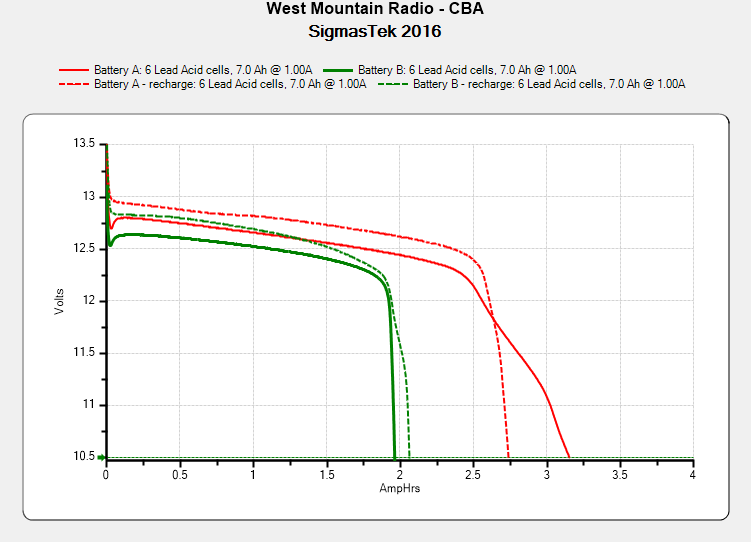
After about four years, the two well-aged 12 V 9 A·hr batteries in the Belkin F6C1500 UPS gave up after a few minutes without line power, whereupon I swapped the UPS out for a new one.
The old batteries don’t have much life left in them (the date in the title should be 2021):
SigmasTek 12V SLA -2025-09-30
That’s with a 1 A load, rather than the 2 A I used earlier, as they’ll never be used for heavy loads again.
The new 7 A·hr batteries can power a 300 W incandescent bulb for 10 minutes before sounding the Low Battery alert, then another three minutes before shutting down. That’s about 12 A at 24 V, call it 2.6 A·hr from grossly overstressed batteries.