Each Kicad LOADRT symbol (upper right):
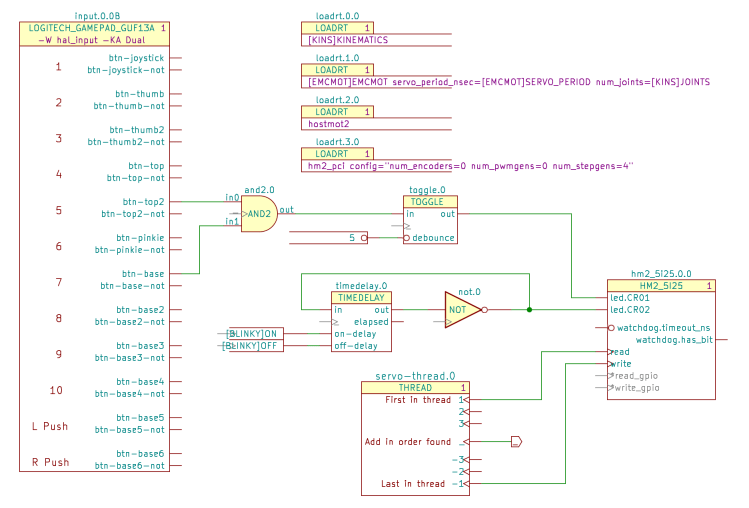
produces a corresponding HAL loadrt command:
loadrt [KINS]KINEMATICS # loadrt.0.0
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS # loadrt.1.0
loadrt hostmot2 # loadrt.2.0
loadrt hm2_pci config="num_encoders=0 num_pwmgens=0 num_stepgens=4" # loadrt.3.0
Symbols with a (typically not-visble) + in their LoadRT field generate matching loadrt commands with the total number of identical symbols:
loadrt and2 count=1<br>loadrt constant count=2<br>loadrt not count=1<br>loadrt timedelay count=1<br>loadrt toggle count=1
Kicad symbols may have additional text after the (typically visible) + sign, as in the LOGIC symbol:
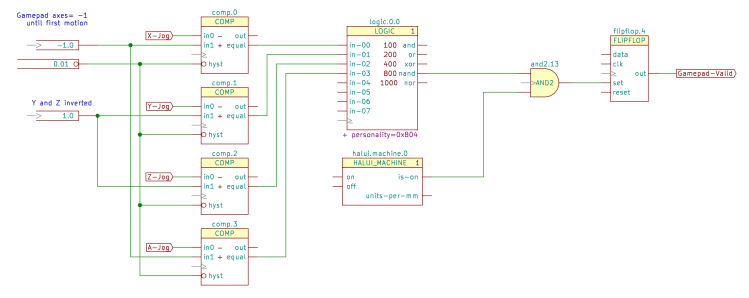
Kicad-to-HAL will concatenate the text, in reference order, into the loadrt command:
loadrt logic count=1 personality=0x804
The LOGIC symbol shows how that works:

Edit the LoadRT field text as needed for each Kicad component, with subsequent blocks omitting the personality= and including a leading comma:
+ ,0x1004
Because the order of the symbols matters, the symbol reference includes a number (the 0 in the symbol reference field) that you must edit by hand for each new schematic component, because the Kicad annotation tacked on the end will change every time you generate new annotations.
The current version of Kicad-to-HAL sorts schematic references alphanumerically, so if you have more than ten LOGIC symbols with concatenated text, it won’t work: FIXME. Maybe annotating with Kicad numbers starting at 100, then subtracting 100 to get the HAL numbers would be simpler?
Update: Yes, numbering from 100 works fine, along with automagically finding the lowest annotation and subtracting it. Upcoming snippets will show both ways.
The Kicad LOGIC symbol has eight input pins and all five possible output pins, despite what the configuration value may create in the corresponding HAL function. As long as you don’t connect anything to the undefined inputs and outputs, Kicad turns them into one-pin anonymous nets which Kicad-to-HAL weeds out of the HAL file.
The demo schematic as a GitHub Gist:
| EESchema Schematic File Version 4 | |
| EELAYER 30 0 | |
| EELAYER END | |
| $Descr USLetter 11000 8500 | |
| encoding utf-8 | |
| Sheet 1 1 | |
| Title "Kicad-to-HAL Demo Schematic" | |
| Date "2021-03-23" | |
| Rev "" | |
| Comp "Ed Nisley – KE4ZNU" | |
| Comment1 "" | |
| Comment2 "" | |
| Comment3 "" | |
| Comment4 "" | |
| $EndDescr | |
| $Comp | |
| L LinuxCNC-HAL:THREAD servo-thread.0 | |
| U 1 1 6059ED1C | |
| P 5650 5200 | |
| F 0 "servo-thread.0" H 5650 5750 59 0000 C CNN | |
| F 1 "THREAD" H 5650 5650 50 0000 C CNN | |
| F 2 "" H 5750 5300 50 0001 C CNN | |
| F 3 "" H 5750 5300 50 0001 C CNN | |
| F 4 "1" H 6050 5650 50 0000 C CNN "StripAnno" | |
| 1 5650 5200 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:LOGITECH_GAMEPAD_GUF13A input.0.0 | |
| U 2 1 605A12D7 | |
| P 3000 3500 | |
| F 0 "input.0.0" H 3000 5350 50 0000 C CNN | |
| F 1 "LOGITECH_GAMEPAD_GUF13A" H 2950 5250 50 0000 C CNN | |
| F 2 "" H 8500 7100 50 0001 C CNN | |
| F 3 "" H 8500 7100 50 0001 C CNN | |
| F 4 "1" H 3550 5250 50 0000 C CNN "StripAnno" | |
| F 5 "-W hal_input -KA Dual" H 2950 5150 50 0000 C CNN "LoadUsr" | |
| 2 3000 3500 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:AND2 and2.0 | |
| U 1 1 605A4CD8 | |
| P 4350 3300 | |
| F 0 "and2.0" H 4350 3500 50 0000 C CNN | |
| F 1 "AND2" H 4350 3300 50 0000 C CNN | |
| F 2 "" H 4350 3300 50 0001 C CNN | |
| F 3 "" H 4350 3300 50 0001 C CNN | |
| F 4 "+" H 4350 3300 50 0001 C CNN "LoadRT" | |
| 1 4350 3300 | |
| 1 0 0 -1 | |
| $EndComp | |
| Wire Wire Line | |
| 3700 3800 3850 3800 | |
| Wire Wire Line | |
| 3850 3800 3850 3400 | |
| Wire Wire Line | |
| 3850 3400 4050 3400 | |
| Wire Wire Line | |
| 4050 3200 3700 3200 | |
| $Comp | |
| L LinuxCNC-HAL:TOGGLE toggle.0 | |
| U 1 1 605A7FF1 | |
| P 5750 3400 | |
| F 0 "toggle.0" H 5750 3700 50 0000 C CNN | |
| F 1 "TOGGLE" H 5750 3600 50 0000 C CNN | |
| F 2 "" H 6050 3350 50 0001 C CNN | |
| F 3 "" H 6050 3350 50 0001 C CNN | |
| F 4 "+" H 5750 3400 50 0001 C CNN "LoadRT" | |
| 1 5750 3400 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:PARAMETER parameter.0 | |
| U 1 1 605A8894 | |
| P 4950 3500 | |
| F 0 "parameter.0" H 4950 3600 50 0001 C CNN | |
| F 1 "5" H 5150 3500 50 0000 R CNN | |
| F 2 "" H 5250 3500 50 0001 C CNN | |
| F 3 "" H 5250 3500 50 0001 C CNN | |
| 1 4950 3500 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:HM2_5I25 hm2_5i25.0.0 | |
| U 1 1 605A8E84 | |
| P 7700 4300 | |
| F 0 "hm2_5i25.0.0" H 7700 4800 50 0000 C CNN | |
| F 1 "HM2_5I25" H 7700 4700 50 0000 C CNN | |
| F 2 "" H 8250 4100 50 0001 C CNN | |
| F 3 "" H 8250 4100 50 0001 C CNN | |
| F 4 "1" H 8100 4700 50 0000 C CNN "StripAnno" | |
| 1 7700 4300 | |
| 1 0 0 -1 | |
| $EndComp | |
| Wire Wire Line | |
| 4650 3300 5450 3300 | |
| Wire Wire Line | |
| 5350 3500 5500 3500 | |
| Wire Wire Line | |
| 6100 3300 6950 3300 | |
| Wire Wire Line | |
| 7150 4550 6900 4550 | |
| Wire Wire Line | |
| 6900 4550 6900 5550 | |
| Wire Wire Line | |
| 6900 5550 6200 5550 | |
| $Comp | |
| L LinuxCNC-HAL:LOADRT loadrt.3.? | |
| U 1 1 605AF190 | |
| P 5000 2950 | |
| AR Path="/6047689B/605AF190" Ref="loadrt.3.?" Part="1" | |
| AR Path="/605AF190" Ref="loadrt.3.0" Part="1" | |
| F 0 "loadrt.3.0" H 5000 3200 50 0000 C CNN | |
| F 1 "LOADRT" H 4950 3100 50 0000 C CNN | |
| F 2 "" H 5800 2450 50 0001 C CNN | |
| F 3 "https://linuxcnc.org/docs/2.8/html/hal/basic-hal.html#_loadrt" H 5800 2450 50 0001 C CNN | |
| F 4 "hm2_pci config=\"num_encoders=0 num_pwmgens=0 num_stepgens=4\"" H 4750 3000 50 0000 L CNN "LoadRT" | |
| F 5 "1" H 5250 3100 50 0000 C CNN "StripAnno" | |
| 1 5000 2950 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:LOADRT loadrt.2.? | |
| U 1 1 605AF198 | |
| P 5000 2600 | |
| AR Path="/6047689B/605AF198" Ref="loadrt.2.?" Part="1" | |
| AR Path="/605AF198" Ref="loadrt.2.0" Part="1" | |
| F 0 "loadrt.2.0" H 5000 2850 50 0000 C CNN | |
| F 1 "LOADRT" H 4950 2750 50 0000 C CNN | |
| F 2 "" H 5800 2100 50 0001 C CNN | |
| F 3 "https://linuxcnc.org/docs/2.8/html/hal/basic-hal.html#_loadrt" H 5800 2100 50 0001 C CNN | |
| F 4 "hostmot2" H 4750 2650 50 0000 L CNN "LoadRT" | |
| F 5 "1" H 5250 2750 50 0000 C CNN "StripAnno" | |
| 1 5000 2600 | |
| 1 0 0 -1 | |
| $EndComp | |
| Text GLabel 6450 5200 2 50 Output ~ 0 | |
| _ | |
| $Comp | |
| L LinuxCNC-HAL:LOADRT loadrt.0.? | |
| U 1 1 605B697F | |
| P 5000 1900 | |
| AR Path="/6047689B/605B697F" Ref="loadrt.0.?" Part="1" | |
| AR Path="/605B697F" Ref="loadrt.0.0" Part="1" | |
| F 0 "loadrt.0.0" H 5000 2150 50 0000 C CNN | |
| F 1 "LOADRT" H 4950 2050 50 0000 C CNN | |
| F 2 "" H 5800 1400 50 0001 C CNN | |
| F 3 "https://linuxcnc.org/docs/2.8/html/hal/basic-hal.html#_loadrt" H 5800 1400 50 0001 C CNN | |
| F 4 "[KINS]KINEMATICS" H 4750 1950 50 0000 L CNN "LoadRT" | |
| F 5 "1" H 5250 2050 50 0000 C CNN "StripAnno" | |
| 1 5000 1900 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:LOADRT loadrt.1.? | |
| U 1 1 605B6987 | |
| P 5000 2250 | |
| AR Path="/6047689B/605B6987" Ref="loadrt.1.?" Part="1" | |
| AR Path="/605B6987" Ref="loadrt.1.0" Part="1" | |
| F 0 "loadrt.1.0" H 5000 2500 50 0000 C CNN | |
| F 1 "LOADRT" H 4950 2400 50 0000 C CNN | |
| F 2 "" H 5800 1750 50 0001 C CNN | |
| F 3 "https://linuxcnc.org/docs/2.8/html/hal/basic-hal.html#_loadrt" H 5800 1750 50 0001 C CNN | |
| F 4 "[EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS" H 4750 2300 50 0000 L CNN "LoadRT" | |
| F 5 "1" H 5250 2400 50 0000 C CNN "StripAnno" | |
| 1 5000 2250 | |
| 1 0 0 -1 | |
| $EndComp | |
| Wire Wire Line | |
| 6200 5200 6450 5200 | |
| Wire Wire Line | |
| 6700 4450 7150 4450 | |
| Wire Wire Line | |
| 6700 4450 6700 4850 | |
| Wire Wire Line | |
| 6700 4850 6200 4850 | |
| $Comp | |
| L LinuxCNC-HAL:TIMEDELAY timedelay.0 | |
| U 1 1 605C692D | |
| P 5200 4250 | |
| F 0 "timedelay.0" H 5200 4600 50 0000 C CNN | |
| F 1 "TIMEDELAY" H 5200 4500 50 0000 C CNN | |
| F 2 "" H 5200 4400 50 0001 C CNN | |
| F 3 "" H 5200 4400 50 0001 C CNN | |
| F 4 "+" H 5200 4250 50 0001 C CNN "LoadRT" | |
| 1 5200 4250 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:CONSTANT constant.0 | |
| U 1 1 605C7C1F | |
| P 4350 4300 | |
| F 0 "constant.0" H 4350 4400 50 0001 C CNN | |
| F 1 "[BLINKY]ON" H 4500 4300 50 0000 R CNN | |
| F 2 "" H 4600 4050 50 0001 C CNN | |
| F 3 "" H 4600 4050 50 0001 C CNN | |
| F 4 "+" H 4350 4300 50 0001 C CNN "LoadRT" | |
| 1 4350 4300 | |
| 1 0 0 -1 | |
| $EndComp | |
| $Comp | |
| L LinuxCNC-HAL:CONSTANT constant.1 | |
| U 1 1 605C822C | |
| P 4350 4400 | |
| F 0 "constant.1" H 4350 4500 50 0001 C CNN | |
| F 1 "[BLINKY]OFF" H 4500 4400 50 0000 R CNN | |
| F 2 "" H 4600 4150 50 0001 C CNN | |
| F 3 "" H 4600 4150 50 0001 C CNN | |
| F 4 "+" H 4350 4400 50 0001 C CNN "LoadRT" | |
| 1 4350 4400 | |
| 1 0 0 -1 | |
| $EndComp | |
| Wire Wire Line | |
| 4750 4300 4850 4300 | |
| Wire Wire Line | |
| 4750 4400 4850 4400 | |
| Wire Wire Line | |
| 7150 4000 6950 4000 | |
| Wire Wire Line | |
| 6950 4000 6950 3300 | |
| $Comp | |
| L LinuxCNC-HAL:NOT not.0 | |
| U 1 1 605D425F | |
| P 6000 4100 | |
| F 0 "not.0" H 6100 4250 50 0000 C CNN | |
| F 1 "NOT" H 6000 4100 50 0000 C CNN | |
| F 2 "" H 6350 3850 50 0001 C CNN | |
| F 3 "" H 6350 3850 50 0001 C CNN | |
| F 4 "+" H 6000 4100 50 0001 C CNN "LoadRT" | |
| 1 6000 4100 | |
| 1 0 0 -1 | |
| $EndComp | |
| Wire Wire Line | |
| 5550 4100 5750 4100 | |
| Wire Wire Line | |
| 6450 4100 6600 4100 | |
| Wire Wire Line | |
| 6600 4100 6600 3800 | |
| Wire Wire Line | |
| 6600 3800 4700 3800 | |
| Wire Wire Line | |
| 4700 3800 4700 4100 | |
| Wire Wire Line | |
| 4700 4100 4850 4100 | |
| Wire Wire Line | |
| 6600 4100 7150 4100 | |
| Connection ~ 6600 4100 | |
| $EndSCHEMATC |
| [EMCMOT] | |
| EMCMOT = motmod | |
| COMM_TIMEOUT = 1.0 | |
| SERVO_PERIOD = 1000000 | |
| [KINS] | |
| JOINTS = 4 | |
| KINEMATICS = trivkins coordinates=XYZA | |
| [BLINKY] | |
| ON = 0.2 | |
| OFF = 2.0 |
| # LinuxCNC HAL file | |
| # Kicad netlist: LinuxCNC Test Schematic.xml | |
| # Tue 23 Mar 2021 10:47:04 AM EDT | |
| #—— | |
| # LoadRT modules | |
| loadrt [KINS]KINEMATICS # loadrt.0.0 | |
| loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS # loadrt.1.0 | |
| loadrt hostmot2 # loadrt.2.0 | |
| loadrt hm2_pci config="num_encoders=0 num_pwmgens=0 num_stepgens=4" # loadrt.3.0 | |
| loadrt and2 count=1 | |
| loadrt constant count=2 | |
| loadrt not count=1 | |
| loadrt timedelay count=1 | |
| loadrt toggle count=1 | |
| #—— | |
| # LoadUsr modules | |
| loadusr -W hal_input -KA Dual # input.0.0 | |
| #—— | |
| # Function hookups | |
| # Position: 1 | |
| addf hm2_5i25.0.read servo-thread | |
| # Position: _ | |
| addf and2.0 servo-thread | |
| addf constant.0 servo-thread | |
| addf constant.1 servo-thread | |
| addf not.0 servo-thread | |
| addf timedelay.0 servo-thread | |
| addf toggle.0 servo-thread | |
| # Position: -1 | |
| addf hm2_5i25.0.write servo-thread | |
| #—— | |
| # Parameters | |
| setp toggle.0.debounce 5 # parameter.0 | |
| #—— | |
| # Constants | |
| setp constant.0.value [BLINKY]ON | |
| setp constant.1.value [BLINKY]OFF | |
| #—— | |
| # Nets | |
| net N_001 <= constant.1.out => timedelay.0.off-delay | |
| net N_002 <= constant.0.out => timedelay.0.on-delay | |
| net N_003 <= not.0.out => hm2_5i25.0.led.CR02 timedelay.0.in | |
| net N_004 <= toggle.0.out => hm2_5i25.0.led.CR01 | |
| net N_006 <= and2.0.out => toggle.0.in | |
| net N_007 <= timedelay.0.out => not.0.in | |
| net N_008 <= input.0.btn-top2 => and2.0.in0 | |
| net N_009 <= input.0.btn-base => and2.0.in1 | |
| #—— | |
| # Done! |

Comments
One response to “Kicad-to-HAL: LoadRT”
[…] LoadRT components: https://softsolder.com/2021/03/26/kicad-to-hal-loadrt/ […]