The setscrew in the motor pulley lies directly in the path of the photosensor:
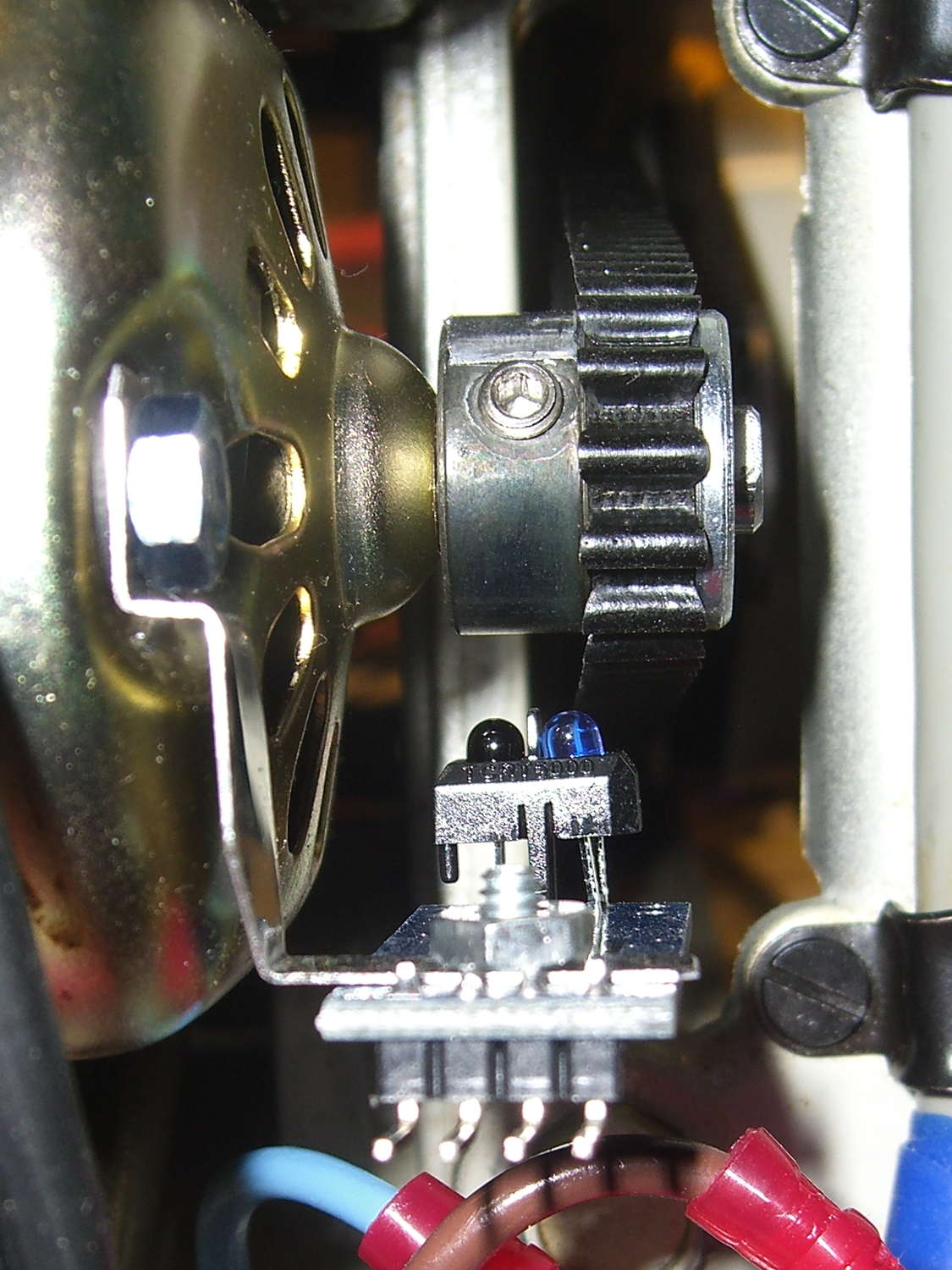
Which produces a glitch in the rising edge of the digital output as the pulley rotates from the dark to the light section:
The RPM signal goes to Arduino pin D2, where each falling edge triggers an interrupt handler:
const byte PIN_MOTOR_REV = 2; // DI - IRQ 0 (must be D2)
... snippage...
void setup() {
... snippage ...
pinMode(PIN_MOTOR_REV,INPUT_PULLUP);
attachInterrupt((PIN_MOTOR_REV - 2),ISR_Motor,FALLING); // one IRQ / motor revolution
... snippage ...
}
The maximum motor speed is about 11 kRPM, so interrupts should be at least 5.5 ms apart and the digital input should be low. If that’s true, then the code updates a bunch of useful information:
struct pulse_t {
byte Counter;
unsigned long TimeThen;
unsigned long Period;
word RPM;
byte State;
};
struct pulse_t Motor;
... snippage ...
//------------------
// ISR to sample motor RPM sensor timing
void ISR_Motor(void) {
static unsigned long Now;
digitalWrite(PIN_SYNC,HIGH);
Now = micros();
if ((5000ul < (Now - Motor.TimeThen)) && !digitalRead(PIN_MOTOR_REV) ) { // discard glitches
Motor.Counter++;
Motor.Period = Now - Motor.TimeThen;
Motor.TimeThen = Now;
Motor.State = digitalRead(PIN_MOTOR_REV); // always zero in a Physics 1 world
}
digitalWrite(PIN_SYNC,LOW);
return;
}
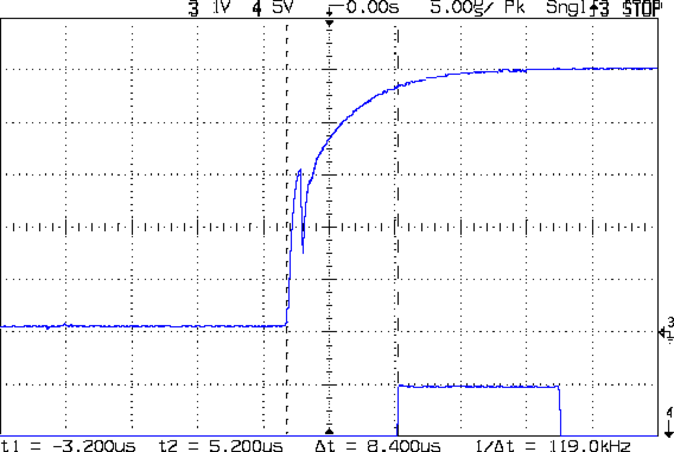
The scope trace shows that the handler takes about 7 µs to get control after the glitch (the left cursor should be on the falling edge, not the rising edge), so the input read occurs when the sensor output is over 4.5 V, causing the handler to discard this spurious interrupt.
Because Motor.Period is a four-byte unsigned long, the Arduino’s CPU must handle it in chunks. Rather than disable interrupts around each use, it’s better to read the value until two successive copies come back identical:
//------------------
// Return current microsecond period without blocking ISR
unsigned long ReadTime(struct pulse_t *pTime) {
unsigned long Sample;
do {
Sample = pTime->Period; // get all four bytes
} while (Sample != pTime->Period); // repeat until not changed by ISR while reading
pTime->Counter = 0; // this is a slight race condition
return Sample;
}
Because the interrupts don’t happen that often, the loop almost always executes only one time. On rare occasions, it’ll go back for another two values.
Converting the pulley rotation period into revolutions per minute goes like this:
Motor.RPM = 60000000ul/ReadTime(&Motor); // one (deglitched) pulse / rev
That’s easier than hiding the setscrew and it also discards any other glitches that may creep into D2…
