|
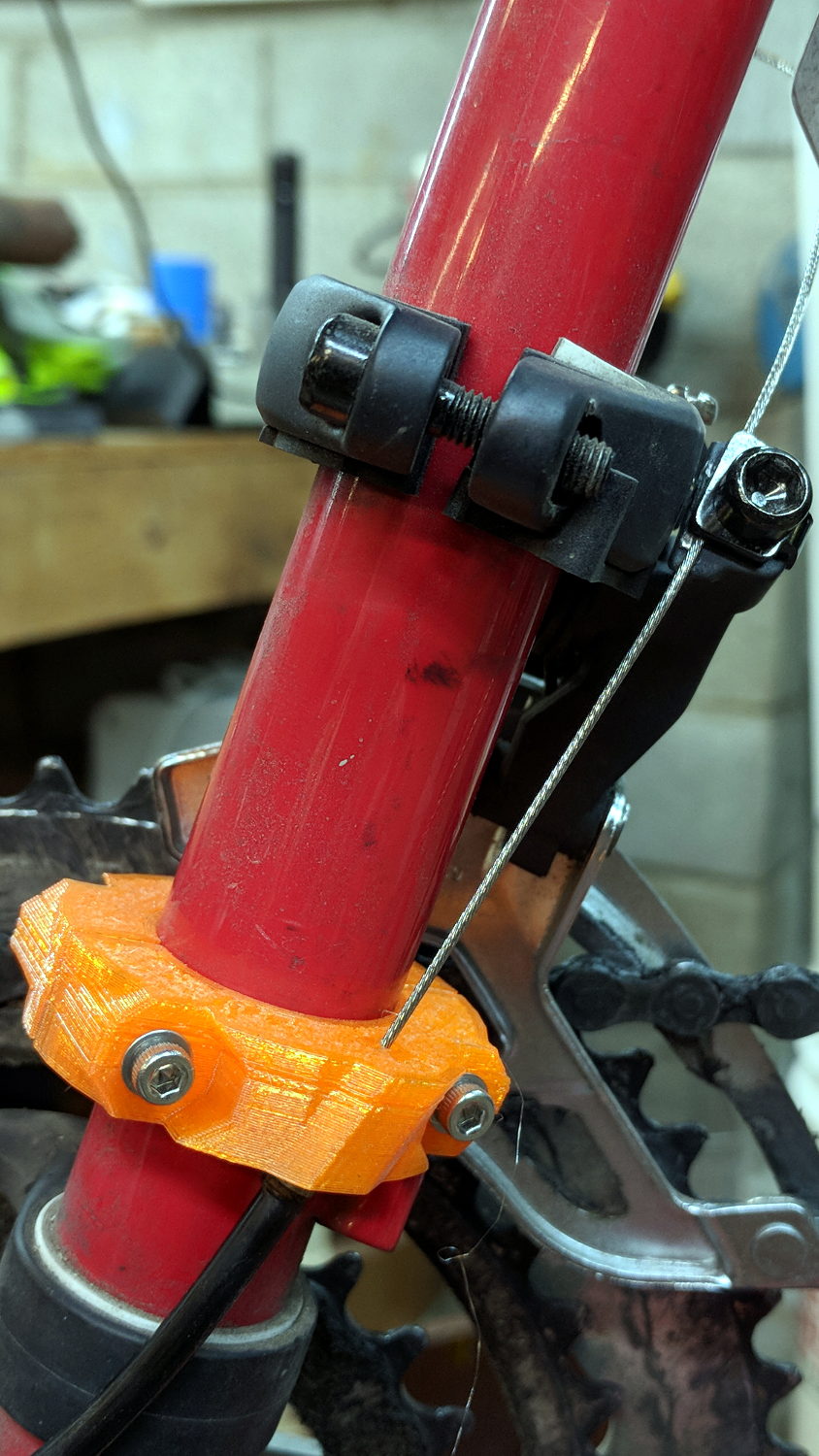
// Tour Easy Derailleur Cable Clamp |
|
// Ed Nisley KE4ZNU – June 2017 |
|
|
|
/* [Build Options] */ |
|
|
|
Layout = "Build"; // [Build, Show] |
|
|
|
/* [Extrusion] */ |
|
|
|
ThreadThick = 0.25; // [0.20, 0.25] |
|
ThreadWidth = 0.40; // [0.40] |
|
|
|
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit); |
|
|
|
/* [Hidden] */ |
|
|
|
Protrusion = 0.01; // [0.01, 0.1] |
|
|
|
HoleWindage = 0.2; |
|
|
|
ID = 0; |
|
OD = 1; |
|
LENGTH = 2; |
|
|
|
/* [Cable Clamp] */ |
|
|
|
FrameOD = 25.7; // Tour Easy has hard inch tubing + paint |
|
|
|
Ferrule = [1.5,5.1,12.0]; // cable ferrule |
|
|
|
EntryPoint = [0,13,60]; // cable entry to derailleur, +Y to rear of bike |
|
|
|
CableTilt = -20; // tilt from parallel to frame tube |
|
CableTheta = 0; // rotation around clamp from +X axis |
|
|
|
/* [Screws and Inserts] */ |
|
|
|
ClampScrew = [3.0,5.5,35.0]; // M3 button / socket head cap screw |
|
ClampWasher = [3.7,7.0,0.7]; // M3 washer |
|
ClampNut = [3.0,6.0,4.0]; // M3 nylock nut |
|
|
|
/* |
|
ClampScrew = [4.0,7.0,25.0]; // M4 button head cap screw |
|
ClampWasher = [4.5,9.0,0.8]; // M4 washer |
|
ClampNut = [4.0,8.0,5.0]; // M4 nylock nut |
|
*/ |
|
|
|
NutShift = -0; // slide bushing toward nut for clearance |
|
|
|
//- Set clamp ring dimensions |
|
|
|
WallThick = 10.0; |
|
|
|
BushingSides = 8; |
|
|
|
Bushing = [ClampScrew[ID], |
|
// ClampWasher[OD]/cos(180/8) + 4*ThreadWidth, |
|
Ferrule[LENGTH]/cos(180/BushingSides), |
|
ClampScrew[LENGTH] – 2*ClampWasher[LENGTH] – ClampNut[LENGTH]]; |
|
|
|
Ring = [FrameOD + HoleWindage,FrameOD + 2*WallThick,Ferrule[LENGTH]]; |
|
|
|
ClampScrewOC = IntegerMultiple(FrameOD + ClampWasher[OD],1); |
|
echo(str(" screw OC: ",ClampScrewOC)); |
|
|
|
ClampKerf = 0.75; // kerf between separated halves |
|
|
|
NumSides = 8*4; |
|
|
|
//- Adjust hole diameter to make the size come out right |
|
|
|
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes |
|
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2); |
|
FixDia = Dia / cos(180/Sides); |
|
cylinder(r=(FixDia + HoleWindage)/2,h=Height,$fn=Sides); |
|
} |
|
|
|
|
|
// Construct things |
|
|
|
module ClampRing() { |
|
difference() { |
|
union() { |
|
cylinder(d=Ring[OD],h=Ring[LENGTH],$fn=NumSides); // basic ring |
|
|
|
for (j=[-1,1]) // screw bushings |
|
translate([Bushing[LENGTH]/2 + NutShift,j*ClampScrewOC/2,Ring[LENGTH]/2]) |
|
rotate([0,-90,0]) rotate(180/BushingSides) |
|
cylinder(d=Bushing[OD],h=Bushing[LENGTH],$fn=BushingSides); |
|
|
|
intersection() { |
|
rotate([CableTilt,0,CableTheta]) // reinforce cable ferrule |
|
translate([(Ring[ID] + Ring[OD])/4,0,Ferrule[LENGTH]/2]) |
|
rotate(180/8) |
|
cylinder(d=3*Ferrule[OD] + 0*ThreadWidth,2*Ferrule[LENGTH],center=true,$fn=8); |
|
cylinder(d=2*Ring[OD],h=Ring[LENGTH],$fn=NumSides); // basic ring |
|
} |
|
} |
|
|
|
translate([0,0,-Protrusion]) // frame tube |
|
cylinder(d=Ring[ID],h=Ring[LENGTH] + 2*Protrusion,$fn=NumSides); |
|
|
|
rotate([CableTilt,0,CableTheta]) // cable ferrule |
|
translate([(Ring[ID] + Ring[OD])/4,0,-0.25*Ferrule[LENGTH]]) { |
|
rotate(180/8) |
|
PolyCyl(Ferrule[OD],Ferrule[LENGTH],8); |
|
rotate(-22.5) |
|
PolyCyl(Ferrule[ID],2*Ferrule[LENGTH],4); |
|
} |
|
|
|
for (j=[-1,1]) // screw holes |
|
translate([Ring[OD]/2,j*ClampScrewOC/2,Ring[LENGTH]/2]) |
|
rotate([0,-90,0]) rotate(180/6) |
|
PolyCyl(Bushing[ID],Ring[OD],6); |
|
|
|
for (i=[-1,1], j=[-1,1]) // screw & nut seats |
|
translate([i*(Bushing[LENGTH]/2) + NutShift,j*ClampScrewOC/2,Ring[LENGTH]/2]) |
|
rotate([0,i*90,0]) rotate(180/BushingSides) |
|
cylinder(d=Bushing[OD],h=Bushing[LENGTH],$fn=BushingSides); |
|
|
|
translate([0,0,Ring[LENGTH]/2]) // slice it apart |
|
cube([ClampKerf,2*Ring[OD],2*Ring[LENGTH]],center=true); |
|
} |
|
} |
|
|
|
|
|
//- Build things |
|
|
|
if (Layout == "Show") { |
|
translate(EntryPoint) |
|
cube(1,center=true); |
|
ClampRing(); |
|
} |
|
|
|
if (Layout == "Build") { |
|
ClampRing(); |
|
} |