Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
Apparently folks have been going around the curve in front of the Dutchess County BOCES site at a pretty good clip. I didn’t spot any scars in the grass off the high side, but ya never know.
We’re at the top of an uphill section and, riding together, we’re not sprinting for town line signs.
The ESP8266 controller in Sophi’s blimp project suffered from random resets, which I was absolutely certain happened when the current for the three DC prop motors glitched the battery supply. So I hauled the Tek current probes + amps + scope to a Squidwrench meeting and, after considerable fiddling, we found a smoking … trace:
Regulator dropout
The purple trace shows the Li-Ion battery voltage at an inactive motor driver located on the far end of a known-to-be-too-small trace. In principle, there’s little-to-no current drawn through that trace, so it should represent the voltage at the regulator input.
The green trace shows the 3.3 V regulator output at its bulk storage cap.
The ground reference is at the PCB’s battery negative connection pad.
The bold dotted green cursor shows the regulator output hitting 2.57 V, entirely low enough to glitch the ESP. The scope triggers on negative-going edges below 2.6 V and this was the first trigger after starting and running the motors for a few seconds.
Conspicuous by its absence: any hint of a current glitch in the yellow trace from a Tek A6302 probe clamped around the battery positive wire. The current remains constant at the 400 mA (100 mA/div) level drawn by two DC motors, with no sign of any glitches whatsoever; she’s not using PWM speed control. The whole board draws about 80 mA DC and the ESP’s WiFi radio pulls 200 mA pulses, so all’s quiet on those fronts.
Which is why I like to measure actual circuit operation: I vastly prefer to solve actual problems, knowing what does (or doesn’t!) cause them helps, and I’m not at all bothered by being wrong.
The regulator output doesn’t go much above 3.3 V, which is comforting.
However, when the regulator’s input voltage falls below 3.3-ish V, its output voltage tracks right along down with it. Input variations above 3.3-ish V don’t make much difference in the output.
Although it’s a buck-boost converter, its response time isn’t fast enough to cope with something else on the PCB pulling enough current to spike its input voltage (shared with the motor driver) below 3.3 V. The dropout is barely 4 ns long, far shorter than the regulator’s switching period.
I have my doubts as to the accuracy of those voltage waveforms and, in particular, their pulse widths. IIRC, the scope can trigger on a pulse exceeding a specific width, but I’d devote more time arranging the test points and getting RF-quality connections / grounding before going further out on a numeric limb.
This single trigger event may not be the glitch causing the reset. What it does show is the regulator output dropping below the ESP’s absolute-minimum input voltage spec, at least briefly, which is cause for concern.
For unknown reasons, the Gnome-ish vino-server package for Xubuntu 18.04 no longer installs vino-preferences, so it’s not obvious how to configure the server.
After considerable flailing, I installed good old x11vnc, set up a password, then started it in .xprofile:
x11vnc -forever -find -no6 -avahi -usepw
I don’t mind having programs change, but it’d be nice if features like, say, configuration wouldn’t just vanish.
On the Dutchess Rail Trail, just north of Page Industrial Park:
Biggest Clown in the Parade – Photo Op – 2018-06-17
Ya gotta admire the confidence of anyone manipulating a kilobuck of slippery glass while looking backward over his shoulder. I’ll take a helmet camera any day, if only because it’s really conspicuous.
He’s leading a group of four riders, all on spendy carbon-fiber bikes:
Biggest Clown in the Parade – Peloton – 2018-06-17
Presumably they’re all smiling at the sight of a recumbent towing a trailer of garden tools topped with two bags of just-picked lettuce. I’m definitely the biggest clown in this particular parade!
We’re ticking along at 18 mph and, as it turned out, drafting a quintet of upright bikes is surprisingly easy. If I weren’t towing the trailer with Mary just out of sight ahead, I’d have had some fun until they decided they’d had enough.
It’s good to bring such happiness into the world …
This is just after noon, when deer should be snoozing, north of Paula’s Public House, with the deer on the creek side of the road. I’m towing the trailer with an empty propane tank, coasting down from 18 mph, and expecting the deer to jump in front of me, because that’s what deer do. It waited patiently until I passed, hopped the guide rail, trotted across the road, then clambered up the steep hillside away from the Mighty Wappinger Creek.
Searching for deer will reveal many more encounters.
We heard God’s Own Weedwhacker off to the right as we approached Jackson Drive on the way home:
Chopper over power lines – Vassar Rd near Jackson Dr – 2018-06-11
The chopper followed the power lines, just over the treetops, with the downdraft thrashing the leaves:
Chopper over power lines – Vassar Rd near Jackson Dr – rear camera – 2018-06-11
Long ago, I attended a talk about using choppers for power line inspection and maintenance. Apparently, someone with nerves of ice can replace insulator supports and aeolian dampers on high-tension lines while perched on a chopper hovering very very close to the conductors. Pilots with experience getting troops into and out of hot LZs are in high demand.
I’m sure they give the E911 call center a heads-up before taking off …
Ex post facto notes from the third Squidwrench Electronics Workshop.
Exhibit various 50 Ω resistors, including my all-time favorite, a 600 W 3 GHz dummy load:
600 W Dummy Load Resistor
… down to a 1/8 Ω metal film resistor.
The dummy load’s N connector triggered a regrettable digression into RF, belatedly squelched because I wasn’t prepared to extemporize on AC concepts like reactance which we haven’t covered yet.
Discussion of resistor applications, power handling, power derating with temperature, etc:
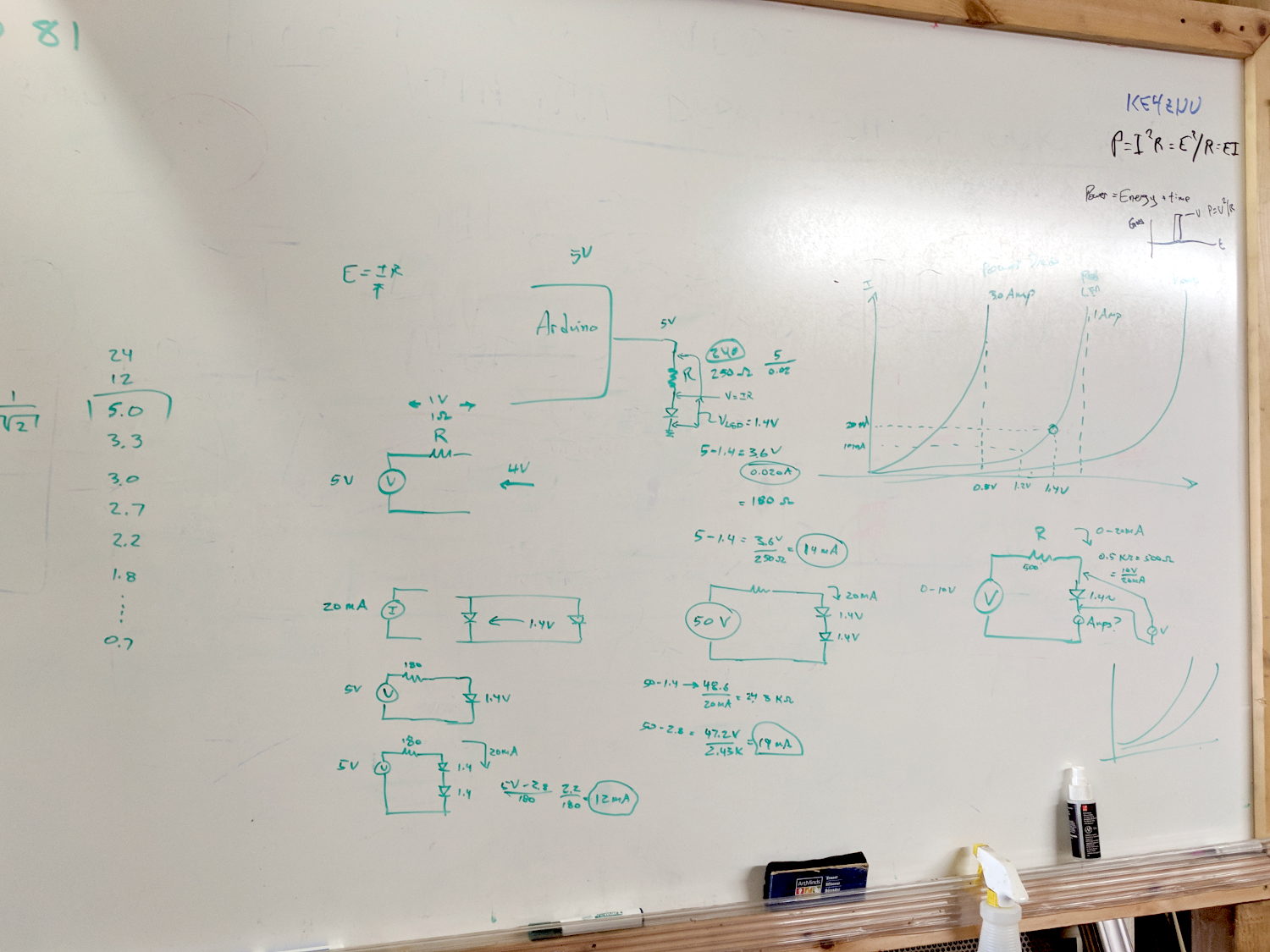
Whiteboard – Session 3 – Resistor power derating
Why you generally won’t find 50 Ω load resistors in Raspberry Pi circuits. Cartridge heaters for 3D printers, not aluminum power resistors, although everyone agrees they look great:
Power resistors on heat spreader
Discussion of voltage vs. current sources, why voltage sources want low internal resistances and current sources want high resistances. Bungled discussion of current sources by putting diodes in parallel; they should go in series to show how added voltage doesn’t change current (much!) in sources driven from higher voltages through higher resistances:
Whiteboard – Session 3 – Voltage vs Current Sources
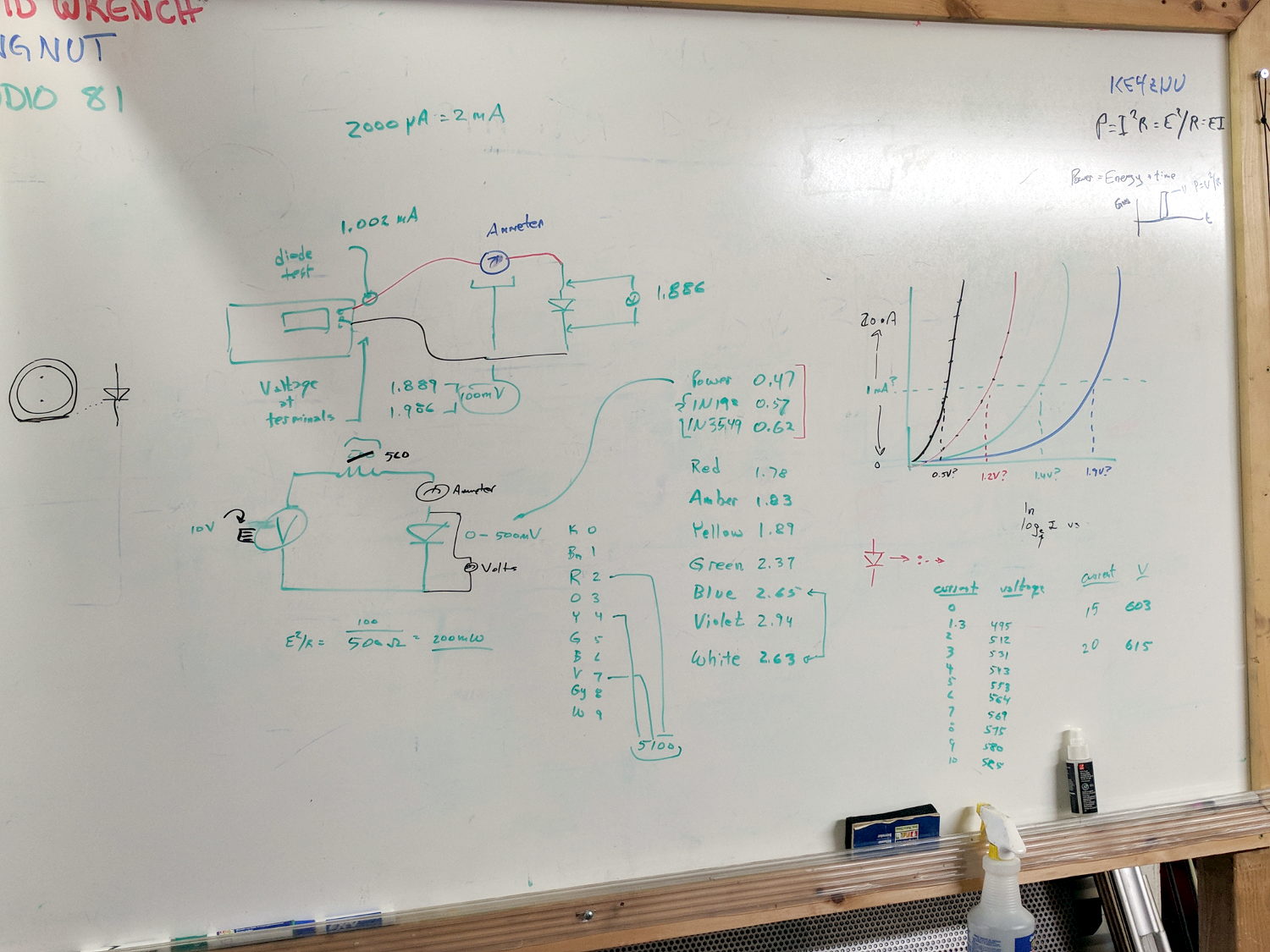
Use Siglent SDM3045X DMM in diode test mode to measure forward drop of power / signal / colored LEDs, discuss voltage variation with color / photon energy. Measure 1.000 mA test current for all forward voltages.
Compute series resistor (500 Ω) to convert adjustable power supply (the digital tattoo box, a lesson in itself) into reasonable current source; roughly 10 V → 20 mA. Find suitable resistor (560 Ω) in SqWr junk box parts assortment, digression into color band reading.
Wire circuit with meters to measure diode current (series!) and voltage (parallel!), measure same hulking power diode (after discovering insulating washers now in full effect) as before in 1 mA steps to 10 mA, then 15 and 20 mA, tabulate & plot results:
Whiteboard – Session 3 – Diode current vs forward drop
Discover warm resistor, compute power at 20 mA, introduce cautionary tales.
Lesson learned about never returning parts to inventory, with 560 Ω resistor appearing in diode drawer. Cautionary tales about having benchtop can of used parts as front-end cache for inventory backing store.