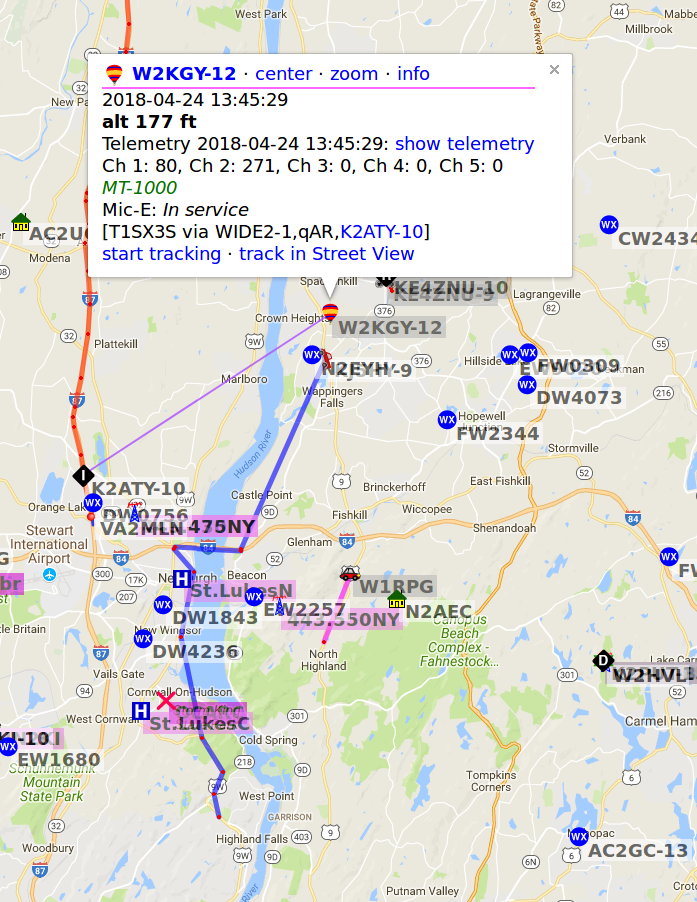
A recent road trip presented this spectacle in the first Pennsylvania rest step on northbound I-83 (clicky for many more dots, then scroll to see it all):
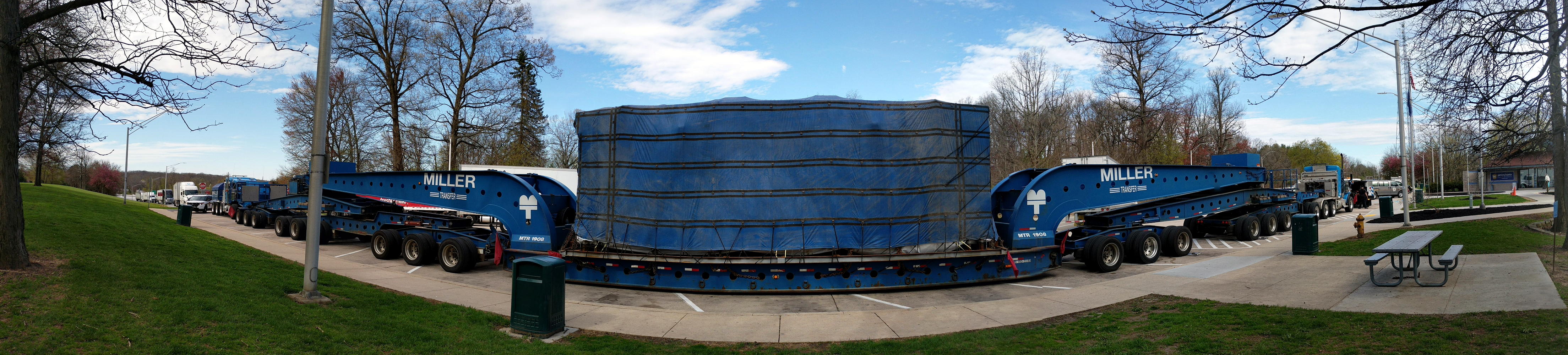
It’s a 150 Ton Flat and Depressed Well 19 Axle Trailer, including four axles on the front truck:

Another truck on the rear pushes uphill and provides lateral control downhill:

The weight block on the rear truck provides more traction, because friction depends on normal force.
The PA transportation folks were verifying the overall weight and per-axle distribution by weighing three axles at a time:

Each scale has a 20 k pound range:
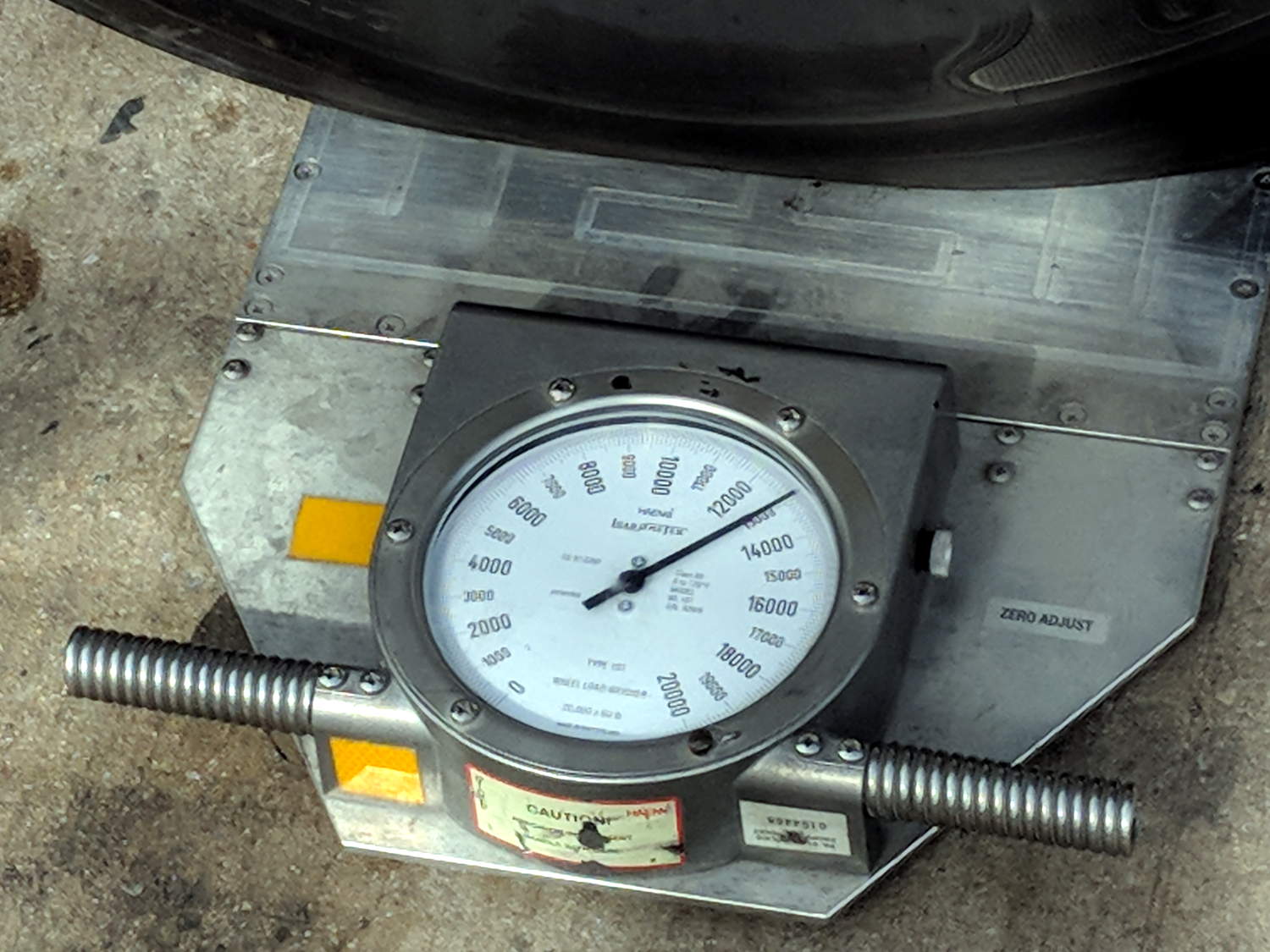
The ones I saw reported 10-14 k pounds, so figure 24 k pounds per axle, then multiply by 19 to get 456 k pounds overall.
The driver of the lead escort vehicle said the tarp covers a machined steel assembly weighing around 200 k pounds, with a total “vehicle” weight a bit under 500 k pounds. This is the second of four similar loads going from the Port of Baltimore to somewhere in Ohio where they’re assembling a huge press. It seems American manufacturing is still a thing.
They’ll be driving for four or five days from Port o’ Baltimore to Ohio, following a route described in excruciating detail on four pages of notes, plus another 16 pages of permits for the series of bridges rated to carry however many axles will be on them simultaneously.
Some searching produced a video of a similar load in transit, perhaps on the same trailer. Another video shows a different trailer jockeying into position beside a ferry (!).
For the folks involved, it was just another day at the office.