In order to stop the sewing machine with the needle either up or down, the controller must know the angular position of the main shaft. Fortunately, the shaft has a counterweight in a not-too-inconvenient location behind the handwheel:
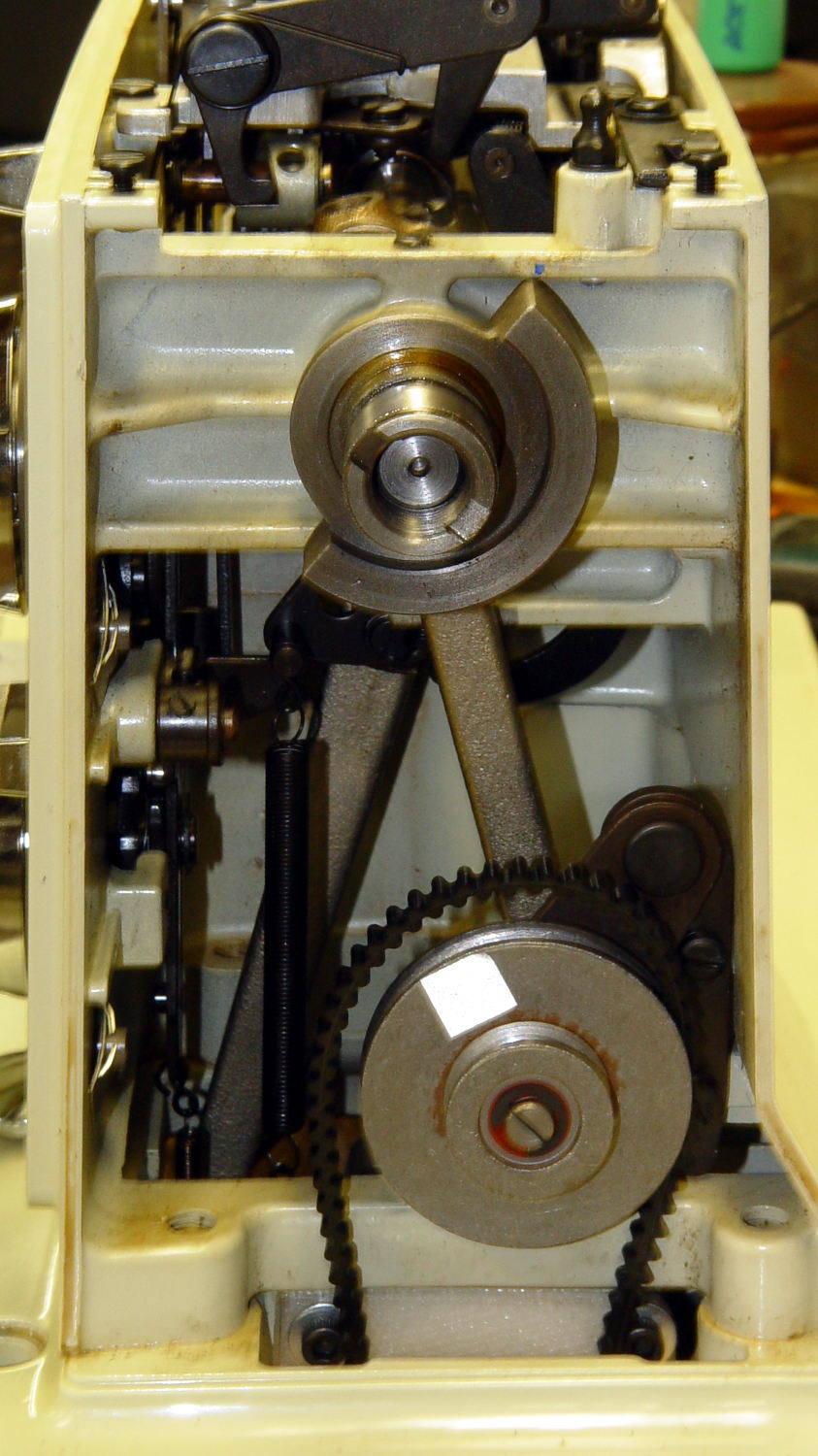
The needle is fully down with the shaft in that position. I originally thought about putting a pair of sensors adjacent to the lower edge, but because the motor can rotate the shaft only counterclockwise (as seen from this end), watching a single sensor tells you everything you need to know:
- Falling edge: needle at top
- Rising edge: needle at bottom
N.B.: Although you can rotate the shaft backwards by hand, the controller needs to know the position only when stopping.
Some fiddling around showed that a TCRT5000 sensor board would fit neatly below the frame cross flange at exactly the right spot:
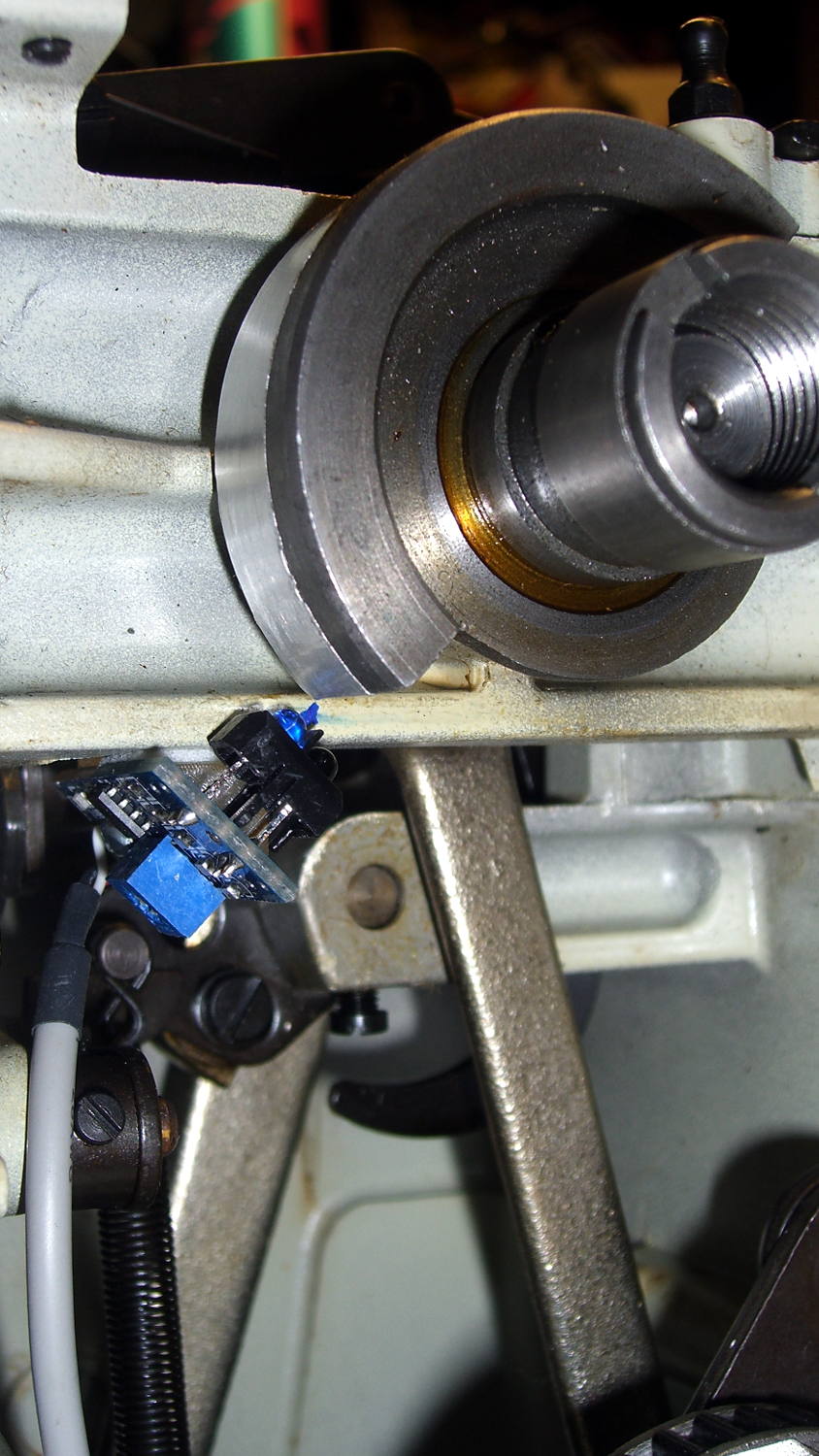
The counterweight now sports a strip of stainless steel tape (normally used on HVAC ductwork) burnished to a high shine:

The tape tucks around the counterweight to keep the wind out of its hair:

The handwheel spins on that smooth ring near the end of the shaft and covers the outer half of the counterweight, so the tape brightens up the only part of the counterweight that the sensor can see.
The sensor mounts on a fiddly bit of plastic that’s ideally suited for 3D printing:

The rectangular recess fits around the protruding trimpot leads, a screw in the hole fastens the sensor, the flange on the top fits against the inside edge of the frame flange to position the sensor head axially along the shaft, and the cutout to the left rear clears the whirling crank bearing on the shaft.
It looked good on the bench:
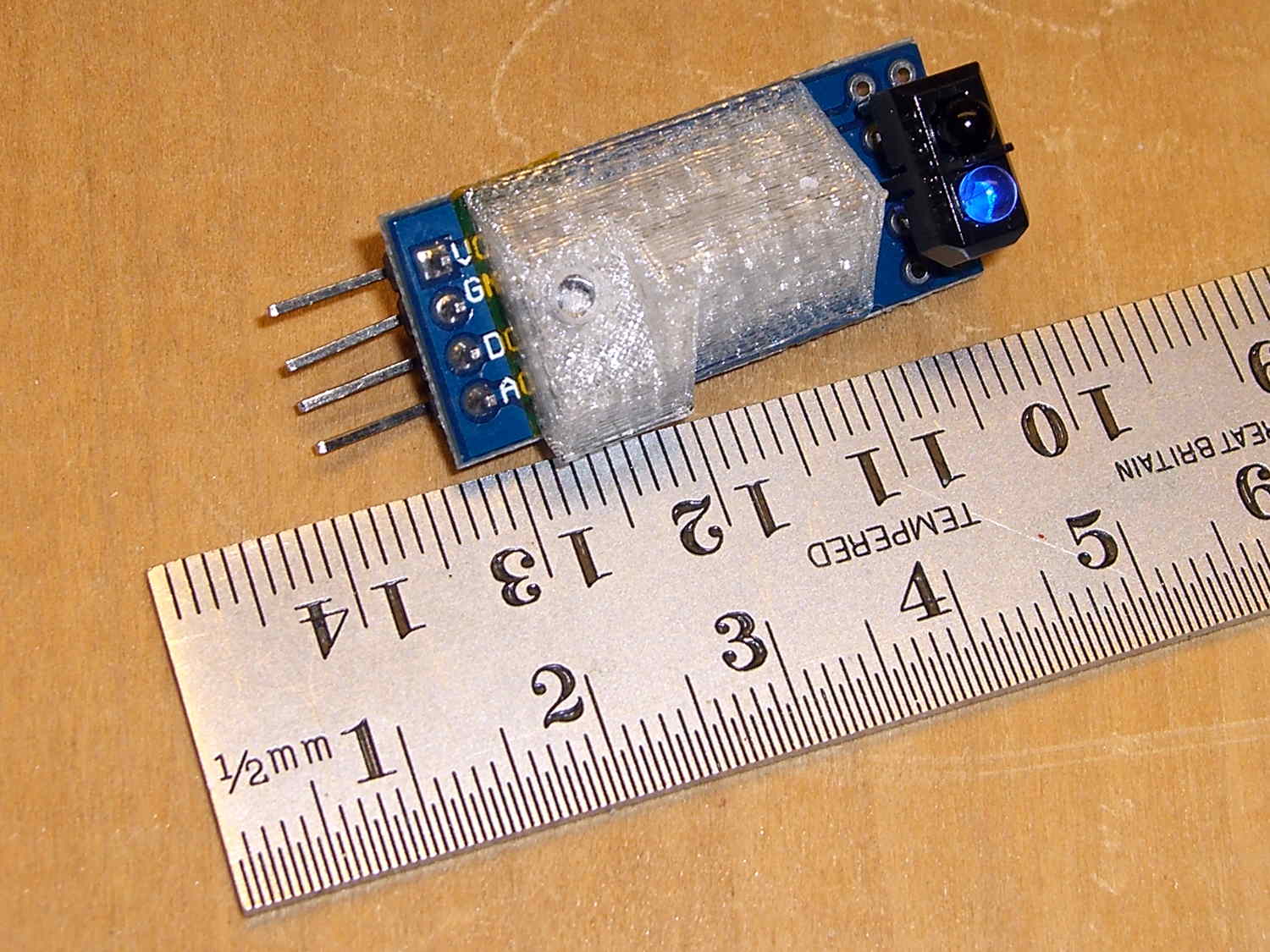
Rather than mess around with more connectors, I removed the pins and soldered a hank of CD-ROM audio cable (remember CD-ROMs?) directly into the top three holes.
After scrubulating the bottom of the frame flange with denatured alcohol, a square of double-stick foam tape holds the mount to the frame, eyeballometrically aligned to the proper position:

That may be slightly too close to the counterweight, as the ideal distance is about 2 mm. The source code can add a shim that moves the mounting plane straight down, allowing the whole thing to move slightly to the left: increase the clearance while maintaining the same angular position. The next version will have a 1 mm BaseShim and we’ll see how that goes.
You could mirror the mount to put another sensor at the quadrature position on the right side of the counterweight.
It’s getting closer to becoming a simple matter of software…
The OpenSCAD source code:
// Shaft Position Sensor Mount
// Ed Nisley - KE4ZNU - October 2014
Layout = "Show";
//- Extrusion parameters must match reality!
ThreadThick = 0.20;
ThreadWidth = 0.40;
HoleWindage = 0.2; // extra clearance
Protrusion = 0.1; // make holes end cleanly
AlignPinOD = 1.70; // assembly alignment pins: filament dia
function IntegerMultiple(Size,Unit) = Unit * ceil(Size / Unit);
//----------------------
// Dimensions
SensorWidth = 14.0; // sensor PCB width
SensorLength = 21.0; // ... contact patch length
NumSensors = 1;
SensorScrewOffset = 5.0; // ... mounting hole to frame edge
PotLeads = [5.0,8.0,1.0]; // trimpot lead recess
PotOffset = [-1.5,8.5,0];
SensorScrewHeadOD = 6.0; // ... mounting screw head dia
SensorScrewTap = 2.25; // ... screw tap diameter
SensorScrewLength = 4.0; // ... screw length inside block
BaseShim = 1.0; // additional height to align sensors
BaseAngle = 45; // downward from horizontal
BaseSensors = NumSensors*SensorWidth; // length along slanted top
BaseLength = BaseSensors*cos(BaseAngle);
BaseHeight = BaseSensors*sin(BaseAngle);
echo(str("Angle: ",BaseAngle," Height: ",BaseHeight," Length: ",BaseLength));
FrameWidth = 13.0; // machine frame width
LipHeight = 3.0; // locates part on frame to position sensors
LipWidth = IntegerMultiple(2.0,ThreadWidth);
Block = [BaseLength,
(FrameWidth + SensorScrewOffset + SensorScrewHeadOD/2),
(BaseHeight + BaseShim + LipHeight)];
echo(str("Block size: ",Block));
//----------------------
// Useful routines
module PolyCyl(Dia,Height,ForceSides=0) { // based on nophead's polyholes
Sides = (ForceSides != 0) ? ForceSides : (ceil(Dia) + 2);
FixDia = Dia / cos(180/Sides);
cylinder(r=(FixDia + HoleWindage)/2,
h=Height,
$fn=Sides);
}
module ShowPegGrid(Space = 10.0,Size = 1.0) {
RangeX = floor(100 / Space);
RangeY = floor(125 / Space);
for (x=[-RangeX:RangeX])
for (y=[-RangeY:RangeY])
translate([x*Space,y*Space,Size/2])
%cube(Size,center=true);
}
//-- Build the sensor mount
module SensorMount() {
difference() {
translate([0,(FrameWidth - Block[1]),0])
cube(Block);
translate([-Block[0],0,(Block[2] - LipHeight)]) // machine frame
cube([3*Block[0],(FrameWidth + Protrusion),Block[2]]);
translate([0,-Block[1]/2,0]) // sensor angle
rotate([0,(90 - BaseAngle),0])
cube(2*Block);
translate([-SensorScrewLength/cos(90 - BaseAngle),-(2*Block[1] + LipWidth),0])
rotate([0,-BaseAngle,0]) // remove all but lip on crank side
cube(2*Block);
for (i=[0:(NumSensors - 1)]) // screw hole
rotate([0,(-BaseAngle),0])
translate([(SensorWidth/2 + i*SensorWidth),-SensorScrewOffset,-Protrusion])
PolyCyl(SensorScrewTap,(SensorScrewLength + 2*Protrusion),6);
for (i=[0:(NumSensors - 1)]) // pot lead recess
rotate([0,(-BaseAngle),0])
translate(PotOffset + [i*SensorWidth + SensorWidth/2 - PotLeads[0]/2,
-(SensorScrewOffset + PotLeads[1]/2),
-Protrusion])
cube(PotLeads + [0,0,Protrusion]);
}
}
//----------------------
// Build it
ShowPegGrid();
if (Layout == "Show")
SensorMount();
if (Layout == "Build")
translate([-SensorWidth,0,0])
rotate([0,(90 - BaseAngle),0])
SensorMount();

Comments
2 responses to “Kenmore 158: Shaft Position Sensor”
And once the position sensor is working you will have to add a embroidery whoop that’s controlled by two steppers.
Next up, assuming this whole mess works, will be the guts of an optical mouse staring upward at the fabric to let the controller maintain a constant stitch-per-inch pace as the fabric moves. It’s not clear an Arduino is the right hammer for that job, however…