That polycarbonate slab holds most of the pieces in place, with the rest on the prototype board to the left of the monster heatsink:
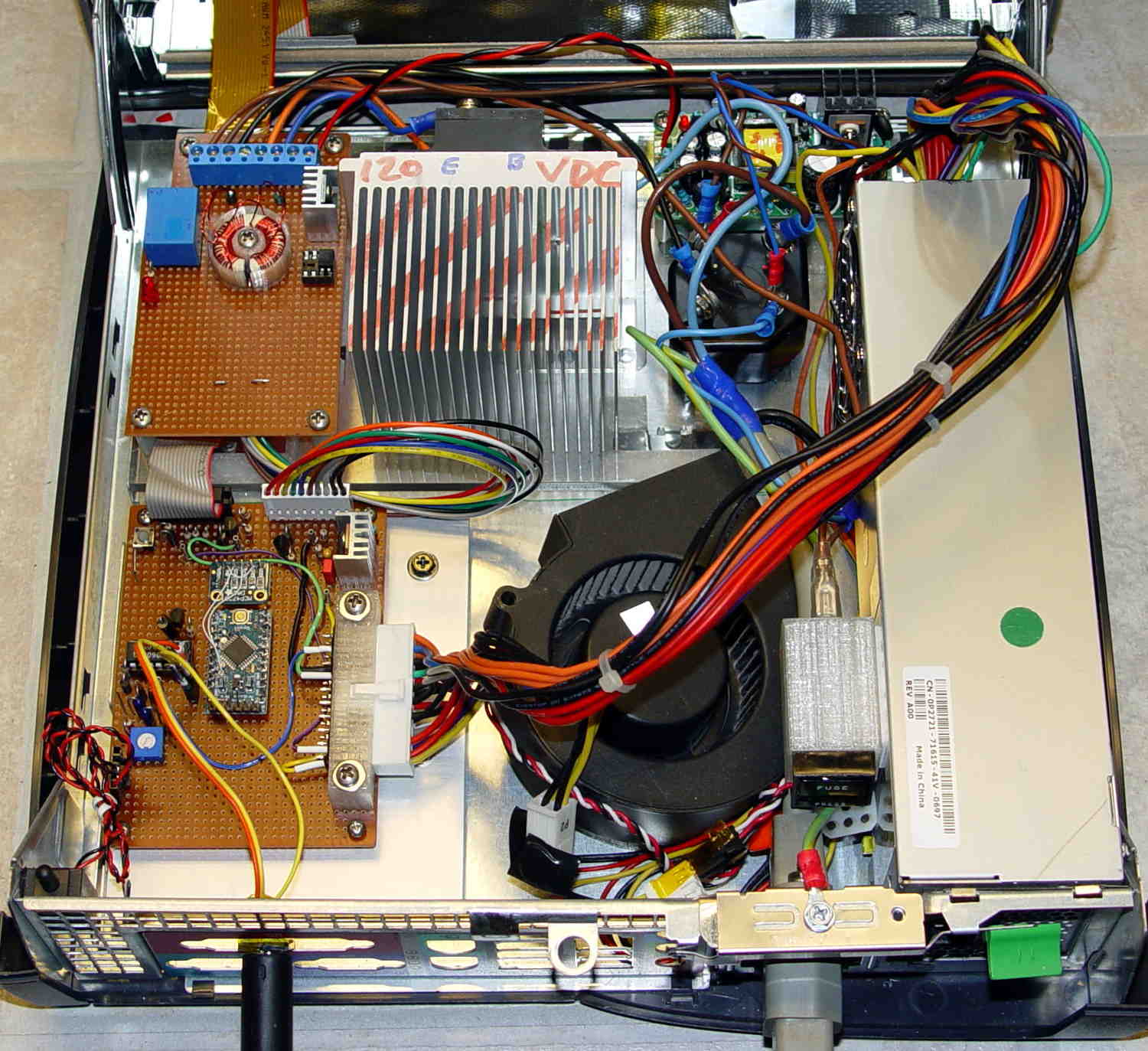
That bulky wire harness got bent out of the way for the photo; normally, it’s jammed down beside the ATX power supply and over the blower.
The AC Interface circuitry looks like this:
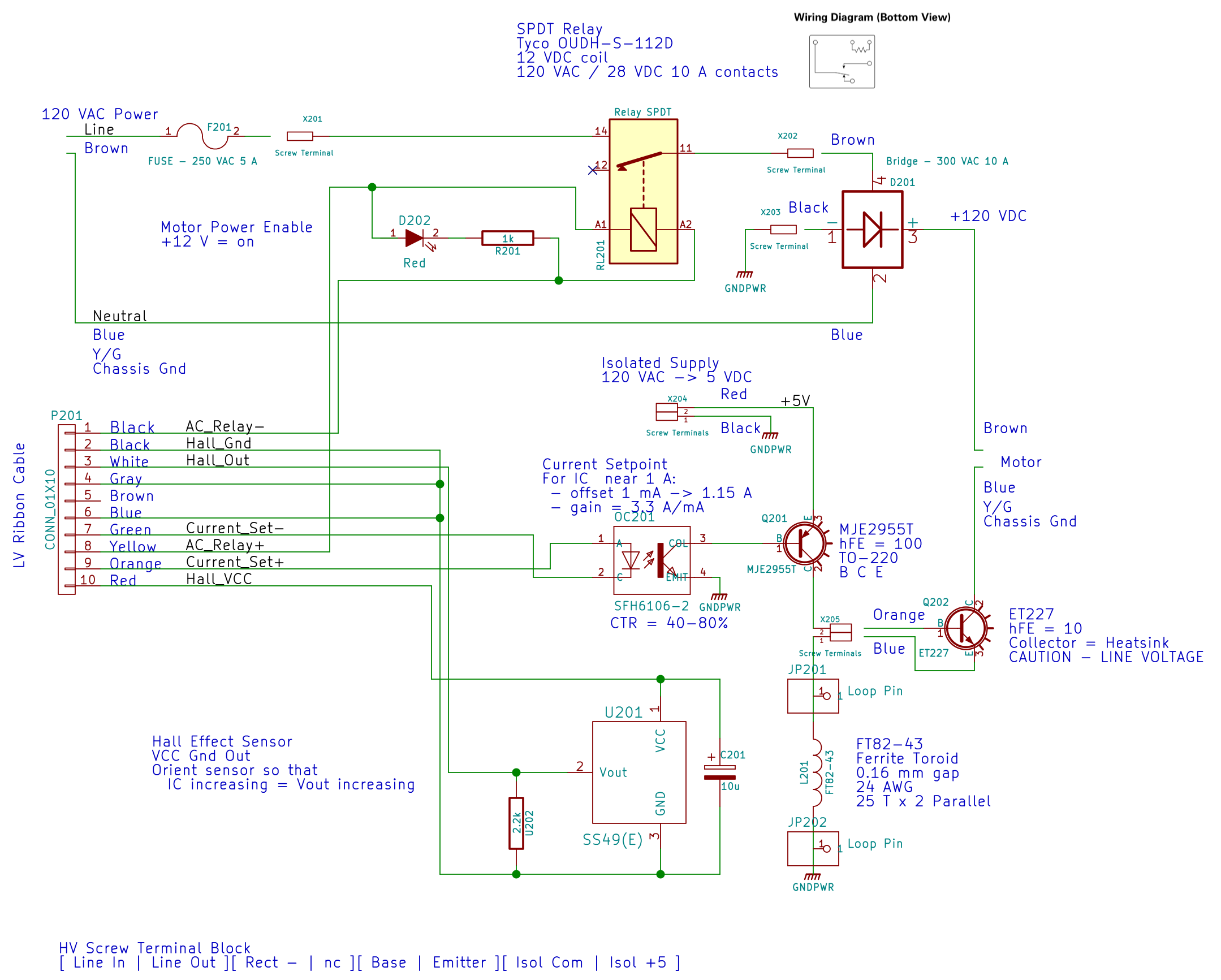
The relay on the top disconnects the AC line from the circuitry when the clamshell case opens.
The key hardware spreads neatly across the middle: the optoisolator, a 2955 PNP power transistor in a TO-220 case on a heatsink as a current amplifier, and the ET227 controlling the motor current. The gain of that mess depends strongly on the transistor temperatures, so there’s not much point in calibrating it. More on that later.
Down at the bottom of the schematic is the slit toroid and knockoff SS49(E) Hall effect sensor that senses the actual motor current.
A closer look at that board:

The board in the bottom left corner of the overview picture holds the Arduino Pro Mini that runs the whole show (so far, anyway), along with various & sundry analog circuitry that I’ll write up in a bit.
Conspicuous by their absence:
- Motor speed sensing
- Shaft position sensing
- Power to the LED strip lights
- Permanent mount for the pedal cable socket
Now I can make measurements without killing myself…

Comments
6 responses to “Model 158 Sewing Machine Controller: AC Interface Circuitry”
Where’s the fun in that? Only kidding, of course. Looking good, eager to see the video of the end result :-)
“Video or it didn’t happen!”
I’d have to find my clean t-shirt and comb my head…
I’m looking at this project with awe… We’ve just found that the only repair tech in the area left the last dedicated sewing machine shop, so when Julie’s 30 year old Elna needs attention, I’m it. There are some spares available online, including the bits for the spooky air-puck system Elna uses for a pedal.
My sister-in-law tells us that sewing machine repair is inept-to-hopeless near Reno, NV, so I suspect it’s that way around the country, even when we could find a tech. Whee. We do have a 2 year old Brother as a backup machine, with electronic everything. The Elna is cam-based, but Julie usually uses it for straight stitching.
I’m keeping an old (486 based) HP server tower for the bullet-proof case and robust power supply. One of these years I’ll need it, and I have the “HP standard” pinout for the supply.
Ouch. I’m sure it wasn’t for lack of biz; sometimes Other Factors come into play.
What I’m doing with Mary’s machine makes absolutely no economic sense and might not make any sense at all. On the other paw, her machine continues to be rock-solid dependable and that makes up for a lot!
Yeah, the economic/demographic situation has a lot of businesses closing or changing due to retirement. Looking at the huge number of vacant business buildings doesn’t give a warm and fuzzy feeling… Heatburn doesn’t count.
[…] existing speed control circuitry limits the peak current and assumes that the motor trundles along more-or-less steadily. That […]