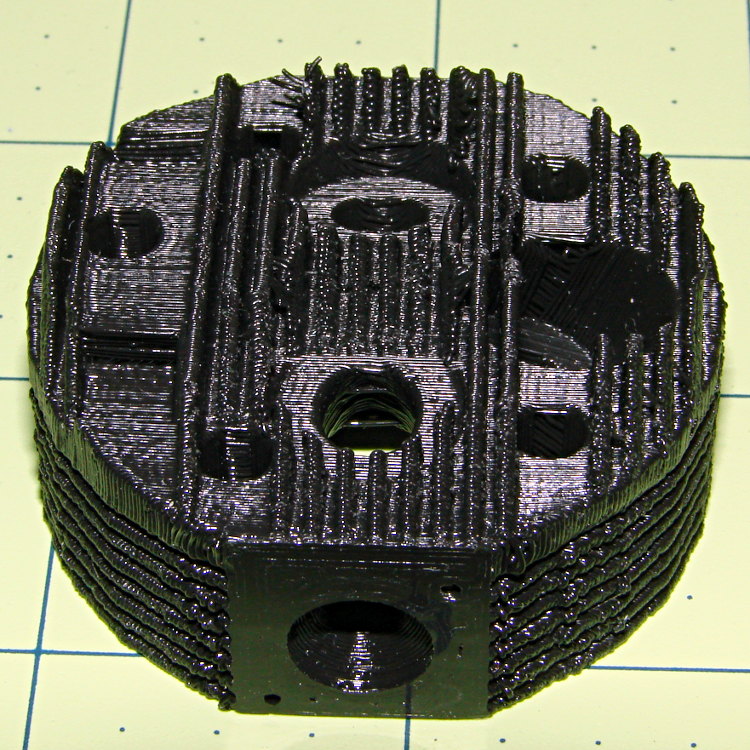
After some chiding by Jetguy, here’s a cylinder head from the MBI radial engine:

The side fins came out nicely, but the top fins had a few misplaced threads (far side to the left of the valve):
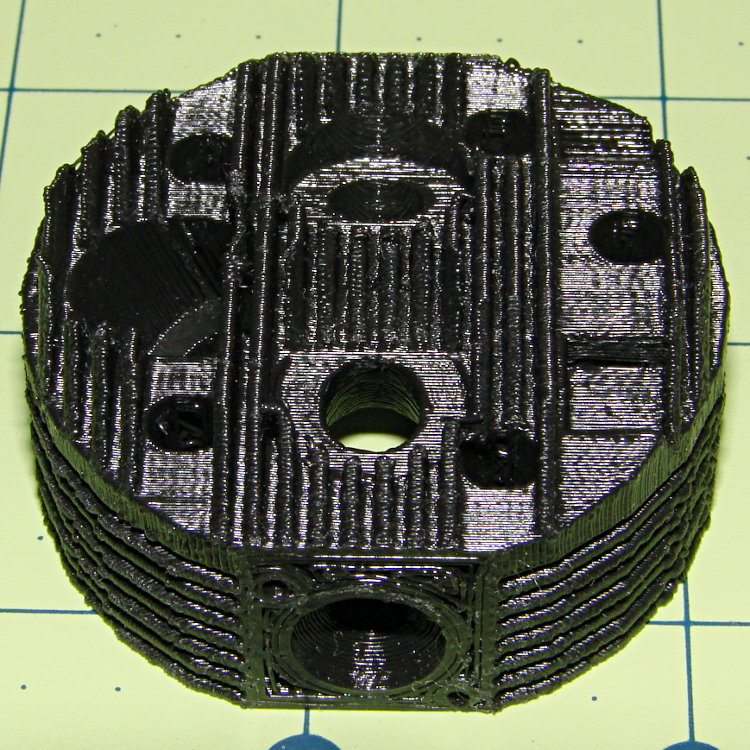
The view from the other port:
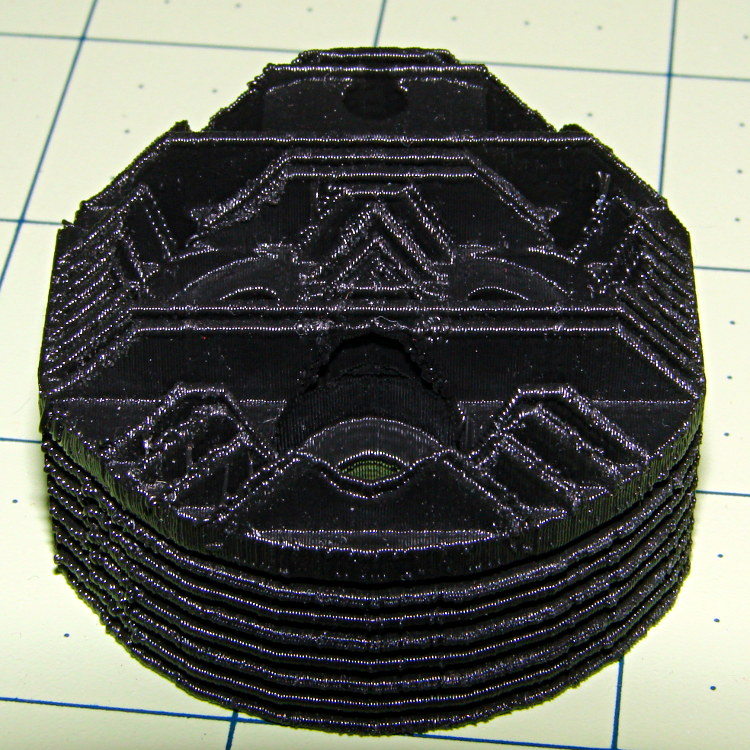
Seen directly from the spark plug side, you can barely make out the impossibly thin fin section arching over the plug hole:
The cylinder side looks OK:

I built it standing on one of the ports with the fins vertical, as shown above, which is probably the only way to do it without soluble support material. If I were doing it for real with non-soluble support, I’d be tempted build it flat on the cylinder side with support under the piston head and thin support blocks inside the side fins. It’d look about the same, but with better finish on the top fins.
All in all, I’d say it looks pretty good.
The Slic3r header:
; generated by Slic3r 0.9.10-dev on 2013-04-20 at 20:24:18 ; layer_height = 0.20 ; perimeters = 1 ; top_solid_layers = 3 ; bottom_solid_layers = 3 ; fill_density = 0.1 ; perimeter_speed = 60 ; infill_speed = 80 ; travel_speed = 200 ; nozzle_diameter = 0.35 ; filament_diameter = 1.73 ; extrusion_multiplier = 0.9 ; perimeters extrusion width = 0.52mm ; infill extrusion width = 0.52mm ; solid infill extrusion width = 0.52mm ; top infill extrusion width = 0.52mm
The STL file came direct from Thingiverse, riddled with the reversed normals and holes common to solid models generated by Sketchup, but a pass through NetFabb’s cleanup made it printable. The original STL positioned it far, far out on the X axis, so if you don’t see it right away, rummage around a bit.

Comments
4 responses to “Makergear M2: Radial Engine Cylinder Head”
Looking good! Also, as you know, black shows off every single imperfection so as far as the misplaced threads go, don’t be too hard on it, that is a truly challenging print. The translucent blue PLA I used hides a lot of the surface imperfections. Again, nicely done print and really shows off that you have the temp just right. Also, because of the very small area of contact and the fact you have a moving bed, the firmware is doing a good job of not jerking with smooth and well adjusted acceleration.
That’s what I thought, but there’s an interesting story lying in wait… I’m still collecting data. [grin]
Much to my surprise, that’s with the full-throttle 10 m/s2 acceleration, not the stock 3 m/s2 it ships with, and “Don’t cross perimeters” turned on. A larger object showed that’s a nasty combination, but it worked out OK here.
The M2 is a good, solid machine; I’m doodling a way to clamp it down so it doesn’t walk off under high acceleration.
>I’m doodling a way to clamp it down so it doesn’t walk off under high acceleration.
In the woodworking world a lot of people use the foam that goes under carpets as a base, for keeping jiggly machinery from going walkabout.
The aluminum clamp for the Z axis rods attaches under the chassis, so it’d need a similar bar on the other side, but I like that idea; I’m pretty sure I have some foam around here somewhere. Thanks for the idea!