Plugging the normalized pedal position into the code that turns position into speed:
case PD_RUN :
if (PedalPosition > 5) {
if (MotorDrive.State != RUNNING) {
EnableMotor();
MotorDrive.State = RUNNING;
}
BaseDAC.setVoltage(0x0fff,false); // give it a solid pulse
SampleCurrent(PIN_CURRENT_SENSE); // sample over a half cycle
if (DriveOnTime > CurrentSamplingTime) {
delay(DriveOnTime - CurrentSamplingTime);
}
// Pedal to the metal?
// ... if so, stall here with motor drive fully on until the pedal releases
while ((MotorDrive.SpeedRange == SPEED_HIGH) && (PedalPosition >= 100)) {
PedalPosition = PedalPercent(ReadAI(PIN_PEDAL));
}
BaseDAC.setVoltage(0,false); // ... then turn it off
delay(map(constrain(PedalPosition,0,PedalMaxClamp),
0,100,
DriveOffTime,0));
}
else {
if (MotorDrive.State == RUNNING) {
if (MotorSensor.RPM) {
printf("Coast: %d\r\n",MotorSensor.RPM);
delay(100);
}
else {
printf("Parking ");
ParkNeedle(MotorDrive.ParkPosition);
MotorDrive.State = STOPPED;
printf(" stopped\r\n");
}
}
}
break;
The magic happens in highlighted statement, which flips the sense of the pedal motion and linearly scales the result into a delay() value ranging from 120 ms (pedal barely pressed) down to 0 ms (pedal almost fully pressed). If the pedal is all the way down, then the preceding while() locks up until it’s released a bit, whereafter the delay will be nearly zero.
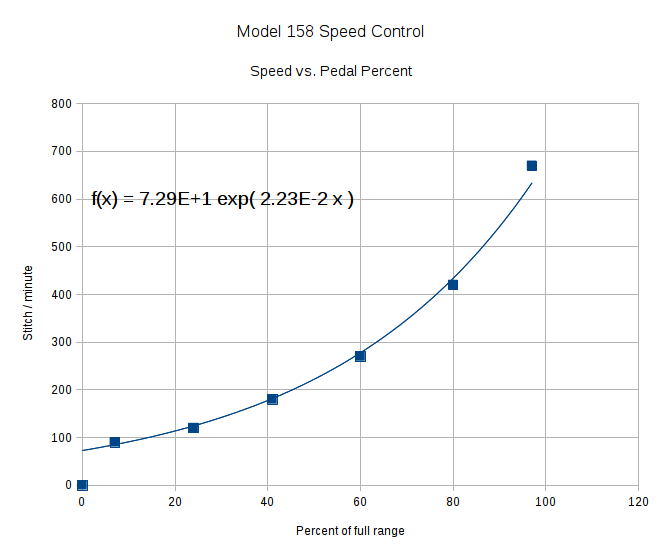
That sorta-kinda worked, but the user community said that the pedal response required pushing too hard for top speed: it should get faster, sooner. The problem came from the simplistic way I set the speed: it was inversely proportional to the position.
Plotting speed against pedal position shows the problem:
I figured the right approach was to make the speed vary linearly with the pedal position, so the trick was to plot the off-time delay vs. the actual speed:

The second-order equation bottles up a bunch of nonlinear things. Given that this was using the original code, I made the dubious assumption that more-or-less the same delay in the new code would produce more-or-less the same speed.
The new code discards the current-sampling routine that I was using to get a fixed delay (because I don’t need to know the current in pulse-drive mode), then used that time for the floating-point calculation required to find the off-time delay. That chunk of code took a bit of fiddling to get right:
case PD_RUN :
if (PedalPosition > 5) {
if (MotorDrive.State != RUNNING) {
EnableMotor();
MotorDrive.State = RUNNING;
}
BaseDAC.setVoltage(0x0fff,false); // give it a solid pulse
MillisOn = millis() + (unsigned long)DriveOnTime;
TargetSpeed = (float)map(constrain(PedalPosition,0,PedalMaxClamp),
0,100,
0,700); // quick and dirty 0 to 700 stitch/min range
OffTime = (int)((1.94e-4*TargetSpeed - 0.286)*TargetSpeed + 106.0);
OffTime = constrain(OffTime,0,120); // clamp to reasonable range
MillisOff = MillisOn + (unsigned long)OffTime; // compute end of off time
while (millis() <= MillisOn) { // wait for end of pulse
continue;
}
if ((PedalPosition >= 100) && (MotorDrive.SpeedRange == SPEED_HIGH)) { // pedal down in full speed mode?
printf("Full speed ... ");
OffTime = 0;
while (PedalPosition >= 100) { // ... full throttle!
PedalPosition = PedalPercent(ReadAI(PIN_PEDAL));
}
BaseDAC.setVoltage(0,false); // pedal released, start coasting
printf(" done\r\n");
}
else { // pedal partially pressed
BaseDAC.setVoltage(0,false); // pulse done, turn motor off
while (millis() <= MillisOff) { // wait for end of off period
continue;
}
}
}
But the result looks as pretty as you could possibly expect:

The pedal still provides a soft-start transition from not moving to minimum speed, which remains an absolute requirement: having an abrupt transition to that straight line would be a Bad Thing. Fortunately, the nature of the magnet moving toward the Hall effect sensor gives you that for free.
Although we’re still evaluating the results, the user community seems happier…

