This worked right out of the box:
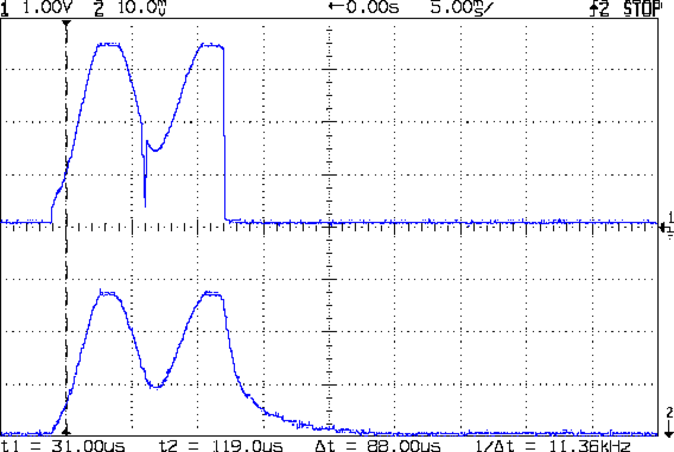
That’s roughly two half-cycles of the full-wave rectified AC with about 100 ms between pulses.
The upper trace comes from the differential amp, the lower trace from the Tek current probe at 1 A/div. The overall amp transconductance looks to be 1.3 A/V = 1.3 A/div, minus that small DC offset, so the ADC range is actually 6.5 A. That might be a bit too much, all things considered, but not worth changing right now.
Notice that the upper trace drops like a rock at the end of the pulse, while the Tek probe shows a gradual decrease. The missing current goes ’round and ’round through the flyback diode across the motor:
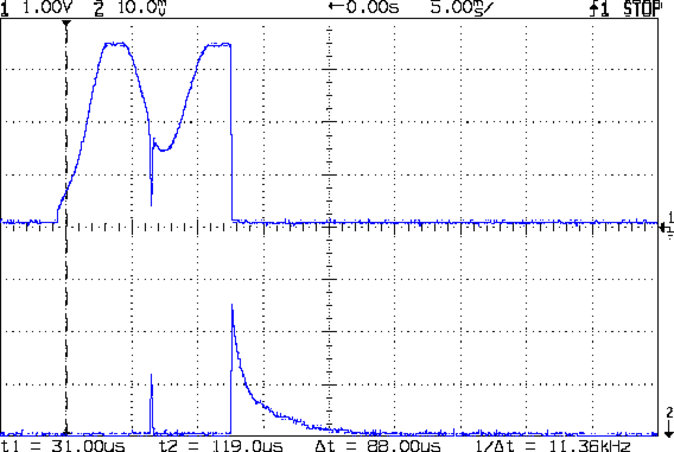
The Tek probe in the lower trace goes on the green wire connecting the diode to the bridge rectifier, oriented to match the diode polarity (+ current flows from motor to blue wire on collector to brown wire on rectifier to motor):

That nasty little spike in the middle of the diff amp output occurs when the collector voltage drops to zero and the ET227 shuts off, but the motor current continues to flow due to the winding inductance. In the first scope shot, the Tek probe doesn’t show any spikes in the motor current, because there aren’t any.
Compare that with the voltage and current of the motor running from an isolation transformer:
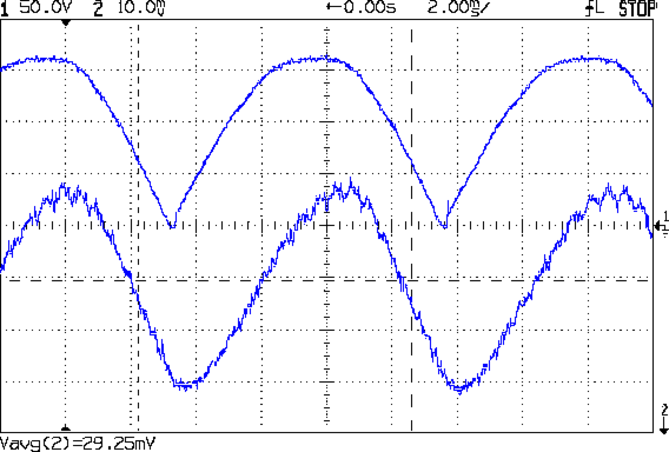
As the pulse repetition frequency increases, the motor speed goes up and the current goes down:

The dropouts between successive pairs of half-cycles show where the firmware shuts off the current and goes once around the main loop.
The Arduino code making that happen:
PedalPosition = ReadAI(PIN_PEDAL);
if (PedalPosition > 190) {
BaseDAC.setVoltage(Cvt_mA_to_DAC(3000),false); // give it a solid pulse
MotorDrive.ADCvalue = SampleCurrent(PIN_CURRENT_SENSE); // measure current = half cycle delay
MotorDrive.ActualCurrent = Cvt_ADC_to_mA(MotorDrive.ADCvalue);
printf("%5u, %5u, %5u, %5u, %5u, %5u, %5u\r\n",
MotorSensor.RPM,ShaftSensor.RPM,MotorDrive.State,
MotorDrive.DACvalue,MotorDrive.ADCvalue,MotorDrive.ActualCurrent,PedalPosition);
delay(3); // finish rest of half cycle
BaseDAC.setVoltage(0,false); // ... then turn it off
delay(map(PedalPosition,190,870,100,0)); // pedal controls off time
}
The map() function flips the sense of the analog voltage coming from the pedal, so that more pedal pressure = higher voltage = lower delay. The pedal voltage produces ADC values from about 185 through 860, with a pleasant sigmoid shape that gives good speed control.
The maximum motor speed isn’t quite high enough for bobbin winding, but I like what I see so far!
