Ed Nisley's Blog: Shop notes, electronics, firmware, machinery, 3D printing, laser cuttery, and curiosities. Contents: 100% human thinking, 0% AI slop.
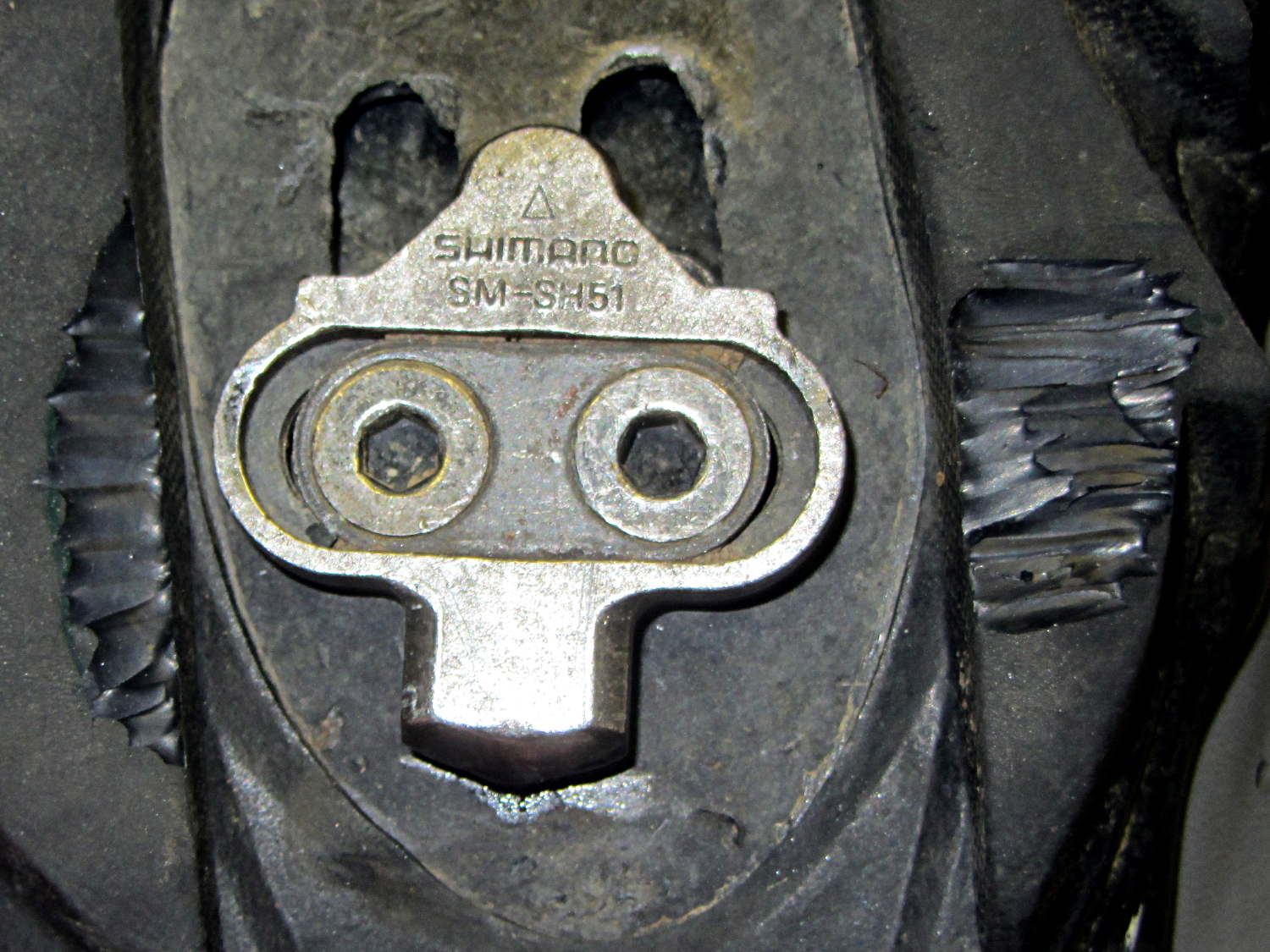
Both Shimano SPD pedals on my Tour Easy have been creaking while climbing hills and I’ve gradually eliminated all the usual mechanical suspects: loose bottom bracket bearings (it’s a cartridge), loose cranks (they’re the old-school tapered squares), loose pedal spindles, and so forth. Of course, it’s impossible to produce the creak with the bike clamped in the work stand, which make debugging particularly frustrating.
After all that, I noticed the shoe soles were wearing the pedal frames just outside the cleat clamps:
Shimano SPD pedal – shoe sole abrasion
So I went so far as to carve away a bit of the sole:
Shimano SPD cleat – trimmed shoe sole
Turns out none of that solved the problem.
What did solve the problem: a drop of oil on the rear of the cleat. You can see a smear of oil on the sole; it doesn’t take quite so much.
As nearly as I can tell, the rear of the cleat drags on the slightly irregular surface of the clamp and, both surfaces being hardened steel, they stick-and-slip just slightly.
A dab of grease may provide longer-lasting relief …
Eks found some heavy-duty ET227 NPN transistors in his heap and put them on the basement steps for me … months ago, because he knew I’d be needing them.
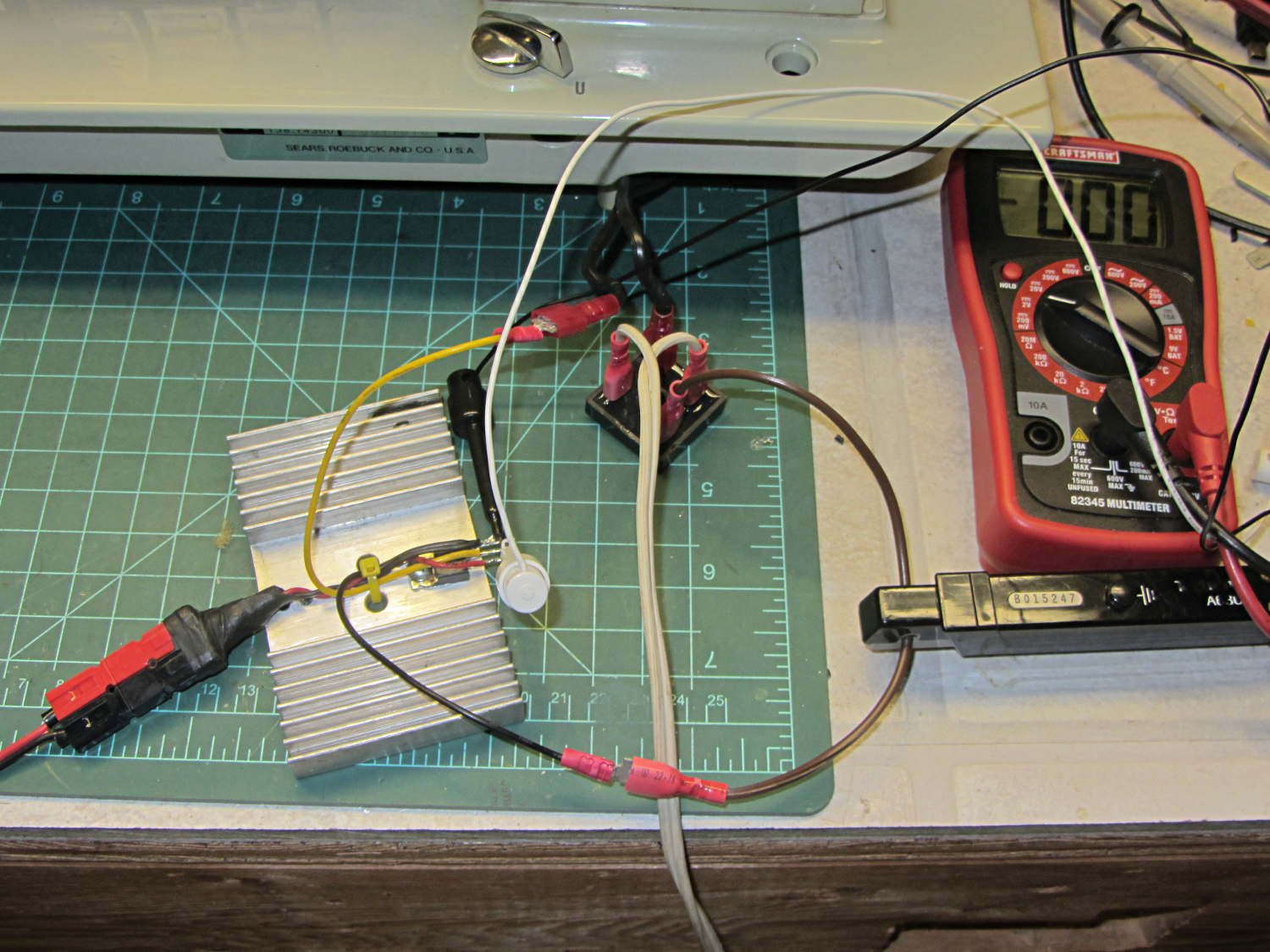
Mounting an ET227 on a massive CPU heatsink with thermal compound and wiring it in place of the failed MOSFET produces this lashup:
Kenmore 158 – ET227 FW drive
The base drive comes directly from a bench supply and the collector sees full-wave rectified 120 VAC from the isolated Variac. The maximum base current rating of 40 A at DC suggests it’ll be difficult to screw this one up. The rectifier bridge doesn’t dissipate enough power to warm up, even without a heatsink.
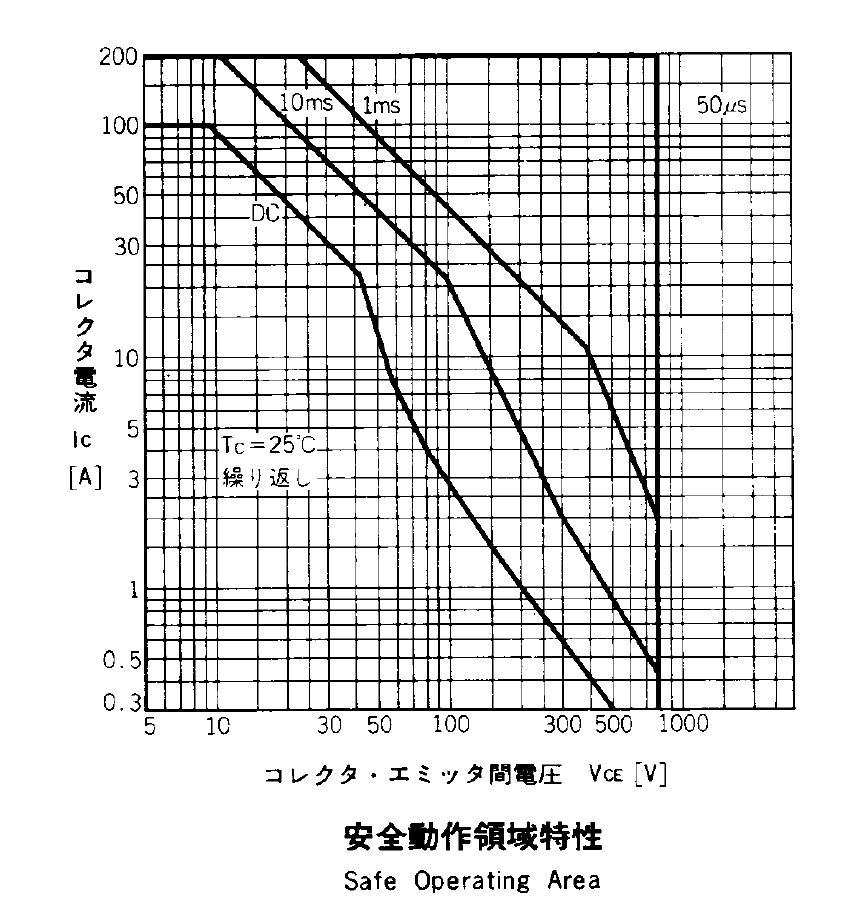
The SOA plot from the ET227 datasheet has the expected 1 kV and 100 A limits that you can’t actually reach under most conditions:
ET227 – Safe Operating Area
The Kenmore 158 motor has a DC resistance of about 50 Ω, so the locked-rotor current won’t be more than about 3 A. The motor current runs around 700 mA with a voltage drop across the transistor ranging from 20 V to 50 V at normal operating conditions, so it’s just barely within the DC SOA. So far, my efforts to kill it by stalling the motor have been unavailing; I have four spares and Eks has at least five more in his heap.
The ET227 has a 960 W (!) maximum dissipation on an ideal heatsink, so the piddly 35 W it might see here doesn’t amount to much. The heatsink should have a quiet demand-driven fan.
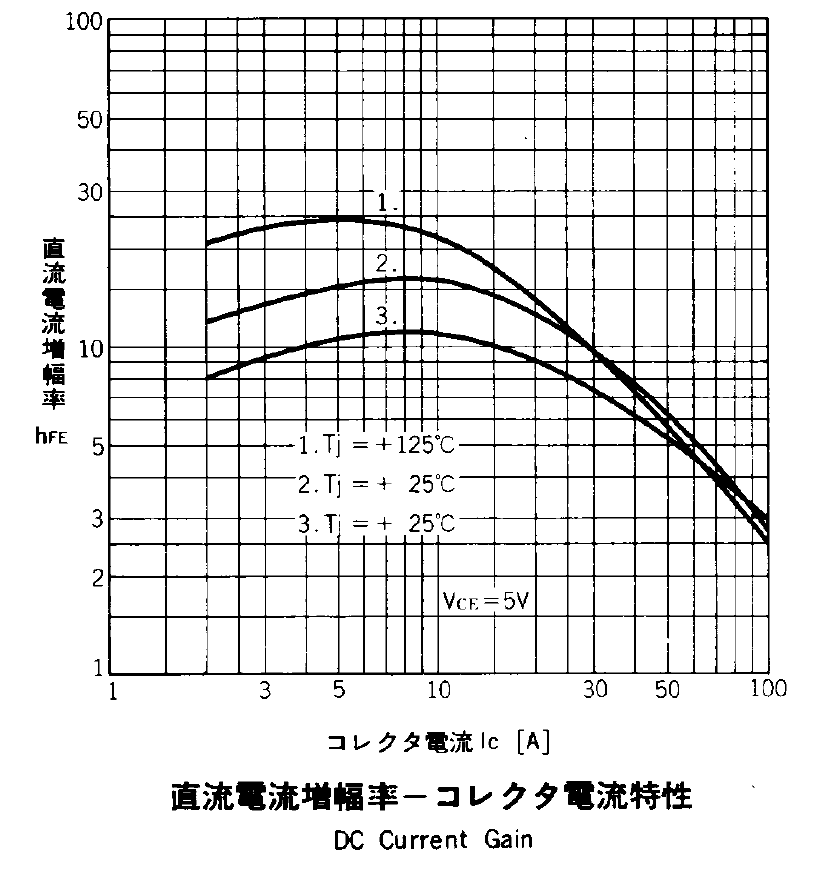
The operating current is offscale low along the left edge of the DC Current Gain plot, which suggests a DC gain under 10:
ET227 – DC Current Gain
As it turned out, the gain was around 7, with 100 mA base drive producing 700 mA of collector current at VBE = 0.9 V, although that comes from the bench supply’s low-res meters. There being an exponential relation between the bench supply’s voltage output and the transistor’s base current, along with the motor’s square-law positive feedback, speed control was mmmm touchy.
So the challenge will be stuffing 100 mA into a 1 V base voltage, with much better resolution and much less ripple than the usual Arduino PWM output, from an isolated supply. Given the amount of power I’m willing to burn in the ET227, a few more watts of base drive won’t make a bit of difference.
Perhaps the best way to handle all the nonlinearities in the current control path will be an isolated current feedback monitor. Hello, Hall effect sensors … [sigh]
At least until I blew out the MOSFET, which is about what I expected. It’s screwed to that randomly selected heatsink, with a dab of thermal compound underneath.
Incoming AC from an isolated variable transformer (basically, an isolated Variac) goes to a bridge rectifier. Rectified output: positive to the motor, motor to MOSFET drain, MOSFET source to negative.
MOSFET gate from bench supply positive and supply negative to source.
Hall effect current probe clamped around the motor current path.
The MOSFET was an IRF610: 200 V / 3.3 A. That’s under-rated for what I was doing, but I had a bunch of ’em.
I actually worked up to that mess, starting with the bare motor on the bench running from the 50 VDC supply. That sufficed to show that you can, in fact, control the motor speed by twiddling the gate voltage to regulate the current going into the motor. It also showed that a universal-wound motor’s square-law positive feedback loop will definitely require careful tuning; think of an unstable fly-by-wire airplane and you’ve got the general idea.
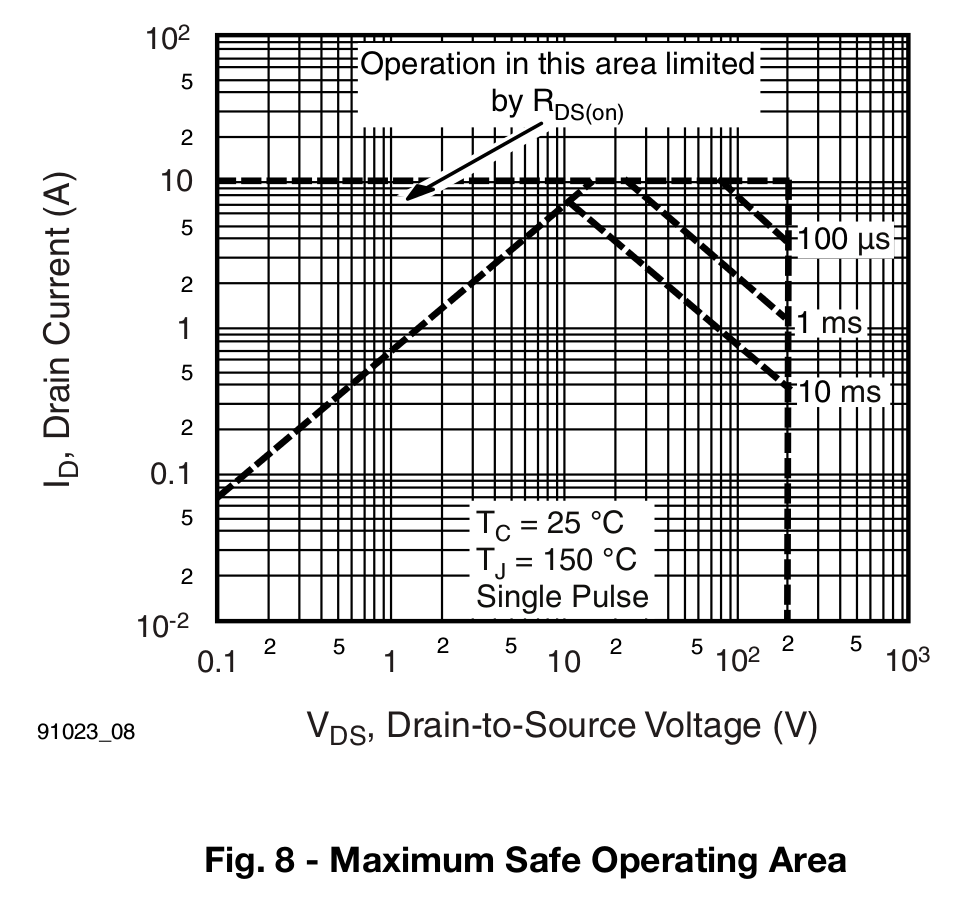
In any event, flushed with success, I ignored the safe operating area graph (from the Vishay datasheet):
IRF610 – Safe Operating Area
Drain current over half an amp at 160-ish peak volts (from rectified 120 VAC) will kill the MOSFET unless you apply it as short single pulses, not repetitive 120 Hz hammerblows.
I also ignored the transfer characteristics graph:
IRF610 – Typical Transfer Characteristics
The curve starting at the lower left should be labeled 25 °C and the other should be 150 °C. The key point is that they cross around VGS = 6.5 V, where IDS = 2 A. Below that point, the MOSFET conducts more current as it heats up… which means that if a small part of the die heats up, it will conduct more current, heat up even more, and eventually burn through.
Yes, MOSFETs can suffer thermal runaway, too.
The motor draws about half an amp while driving the sewing machine, which suggests the gate voltage will be around 5 V. In round numbers, it was 5.5 to 6 V as I twiddled the knob to maintain a constant speed.
At half an amp, the MOSFET dissipated anywhere from a bit under 1 W (from RDS(on) = 1.5 Ω to well over 25 W (while trying to maintain headway with friction on the handwheel). I ran out of fingers to record the numbers, but dropping 10 to 20 V across the MOSFET seemed typical and that turns into 5 to 10 W.
It eventually failed shorted and the sewing machine revved up to full speed. Sic transit gloria mundi.
In any event, I think the only way to have a transistor survive that sort of abuse is to start with one so grossly over-rated that it can handle a few amps at 200 V without sweating. It might actually be easier to get an ordinary NPN transistor with such ratings; using a hockey puck IGBT or some such seems like overkill.
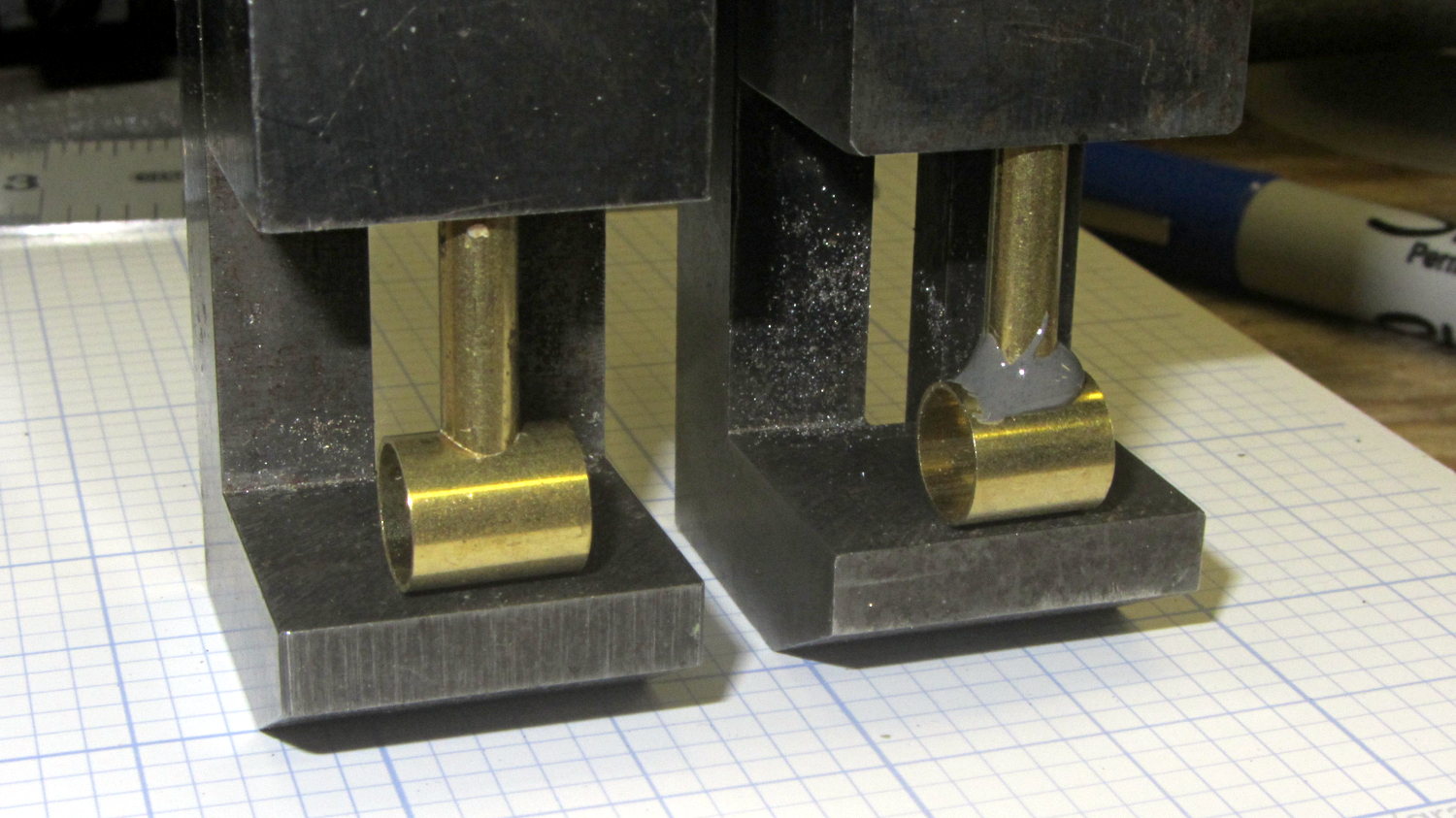
The last time around, this involved silver soldering the boom wire directly to the mic housing. This time, I filed a fishmouth in the smaller tube and epoxied it to the tube that’ll hold the mic capsule:
Bike Helmet Mic Boom – housing
The smaller tube is a loose slip fit for #10 copper wire, but that’s really too heavy for the boom. I’ll probably nestle #12 wire inside another tube and epoxy that whole affair in place.
The mic capsule tube needs a rounded notch filed in one end to accommodate the wire.
Even though it’s really hard to damage a trailer hitch made of 5/16 inch welded steel plate, that hitch made a mess out of the cardboard box:
Trailer hitch receiver – as received
It’s a Class III hitch with specs (3500 pound max, 525 pound tongue weight) that greatly exceed the Forester’s ratings (1500/150 pound), but it seems to be the only way to get a 2 inch receiver socket. I have no intention whatsoever of towing anything I can’t see over and around.
This is part of the “how to haul the recumbents” solution. Trailer hitch racks require a receiver with a tongue rating of twice the static load; a pair of Tour Easy ‘bents and most of the racks weigh in pretty close to the Subaru OEM 150 pound rating.
Inspired by our Larval Engineer’s threat promise to decorate the Sienna, I just had to do this to the Forester:
Forester wheel cover decoration
They’re intended to fit around the keyhole under a car door handle, but cars don’t look like that these days; they were a surplus deal from long, long ago.
The reflectors stand out nicely in subdued light:
Forester wheel cover decoration – flash
The hub covers have an embossed Subaru logo and the reflector has thin foam tape, so it’ll be interesting to see how long they last. Worst case: 3D printed replacement hub covers with integral reflectors.
The sewing machine motor drives the handwheel through a double pulley on a jackshaft:
Kenmore 158 – handwheel – jackshaft pulley
I’ve been figuring a 10:1 speed reduction, based on counting revolutions and ignoring belt slip. The correct answer also depends on belt tension and whether you turn the motor or the handwheel.
Measuring the pulley diameters isn’t straightforward, because the belt runs deep in the handwheel pulley (the brown smudge is near the rim, above) and high on the motor pulley:
Kenmore 158 – NEMA 23 stepper – on adapter
Measuring across the tops of the belt ribs on the pulleys gives these diameters:
Motor: 18 (or 16.6 at the belt midline = pulley OD)
Jackshaft large: 48
Jackshaft small: 24
Handwheel: 75
The end-to-end ratio is either 8.3 or 9, depending on what you call the motor pulley. Either of those are close enough to 10:1 to allow for a turn or two of motor pulley slippage.
Flipping the jackshaft pulley doesn’t quite work, as the pulley ends aren’t symmetrical, but I think it can be forced to align with the handwheel if I add a lathe-turned hoodickie. If so, then the end-to-end speed ratio drops to a little over 2:1 and the original belts fit just fine:
Kenmore 158 – reversed jackshaft pulley
The maximum handwheel speed ran a bit under 1000 RPM, so the reduced ratio lets the motor turn at 2000 RPM. That’s well within range of a NEMA 23 brushless DC motor, but it must also satisfy the other non-obvious requirements:
Acoustic = no squeals, not even a little bit
Physical = a scant 100 mm from mounting plate to edge of the frame casting for a 57 mm diameter cylinder
Measuring the torque required to drive the sewing machine would go a long way toward finding the proper motor. The LeadshineBLM57050 would drop in, the BLM57090 might barely fit with some filing of a rib in the machine’s base, the and the BLM57130 isn’t in the running. The OEM motor dataplate says it’s 110 – 120 V @ 1 A = 110 – 120 W, but that surely doesn’t mean the same thing as the 130 W rating for the BLM57130.
I should just buy a motor and driver brick to see what it’s like … [sigh]