It seems that the “49E” Hall effect sensor I used to measure the field in the ferrite toroid was running at 1.9 mV/G, rather than the 1.0 to 1.75 range suggested by the perhaps-not-quite-applicable specs. Here’s a table of all the sensors in my collection, which came in two bags from the usual eBay vendors:
| Seq | 49E 231NB | AH49E |
| 1 | 41.1 | 18.5 |
| 2 | 42.9 | 20.0 |
| 3 | 39.5 | 19.9 |
| 4 | 40.6 | 18.8 |
| 5 | 43.3 | 18.9 |
| 6 | 42.6 | 23.0 |
| 7 | 40.7 | 20.0 |
| 8 | 44.0 | 19.3 |
| 9 | 18.9 | |
| 10 | 19.5 | |
| 11 | 20.0 | |
| 12 | 19.8 |
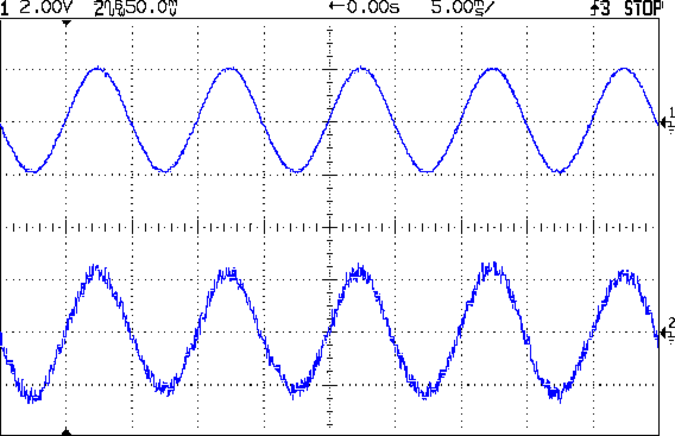
That’s the RMS value in mV of the sine wave resulting from a 200 mA peak current in the 25 turn winding, measured on the scope with low pass filtering and 8 trace averaging. An unfiltered and unaveraged trace looks like this, which explains why I’m knocking back the noise:

Even with that noise reduction, the variation between successive readings is about 5%, so trust only the first digit and half of the second; the fractional digit is worthless. Averaging the columns gives 42 and 20 mV RMS, which correspond to 59 and 28 mV peak. I estimated 60 mV peak from the filtered-but-not-averaged scope trace in the earlier calculations, which falls in the same ballpark. If you were doing this for real, you’d use a DC current and a static field, plus a simple RC filter to improve the noise rejection, but this was a quick-and-dirty measurement.
The peak magnetic flux should be about 31 to 33 G; I’ve been using 32 G based on the nominal permeability and measured air gap. Assuming that’s the case, then the sensors in the first column run at 1.8 mV/G (1.75 + 3% or 1.7 + 6%) and those in the second column at 0.875 mv/G (1.0 – 9%).
Here’s what I think: these are manufacturing rejects, sold cheap to extract money from suckers. Those in the first column came from the “too high” scrap heap, the second column’s contestants were in the “too low” pile. Note the tight clustering: they’re not random, they’ve been carefully selected! A quick-and-dirty histogram tells the tale:

The nominal range, taken from the SS49E datasheet, runs neatly across the gap in the middle, with one sensor falling just barely inside. The SS49 range neatly brackets the data on the left, but that’s not what those parts are supposed to be.
Now, I’ve often referred to eBay as my parts locker (at least for stuff I don’t have in the Basement Laboratory Warehouse Wing), but I know what to expect and am not in the least surprised at these numbers. If you or anyone you know buys parts from eBay in the expectation that they’re getting Good Stuff Cheap, then you should rethink that expectation.
I’d say that, to a very good first approximation, anything bought directly from halfway around the planet via eBay (or any source like it) will be, at best, counterfeit. For my purposes, I can measure and use most of it (assuming it actually works and ignoring minor issues like, oh, reliability and stability). In an actual product application, eBay is not the way to get your parts.
No surprise, right?
I wonder what the supply current might be? They’re supposed to run around 6 mA, max 10 mA…