With a wound ferrite toroid in hand, the next step involves measuring the magnetic field in the gap from a known winding current. I don’t have a calibrated magnetic sensor, so all this involves considerable guesswork and estimation.
A ULN3751Z power op amp converts an input signal voltage into winding current:

The 10 Ω sense resistor (5% tolerance, measured at 9.97 Ω on a typical 5% meter) sets the conversion at 100 mA/V, which should be good enough for a first pass. The ULN3751Z has 40 to 60 mA quiescent current and would cook at 1.2 W from ±12 V supplies, so I used ±5 V for this test. That’s not enough for a wide output range, but it’s OK now.
Given that I already have a breadboard with a Hall effect sensor on it, I hairballed the winding driver in an empty spot:
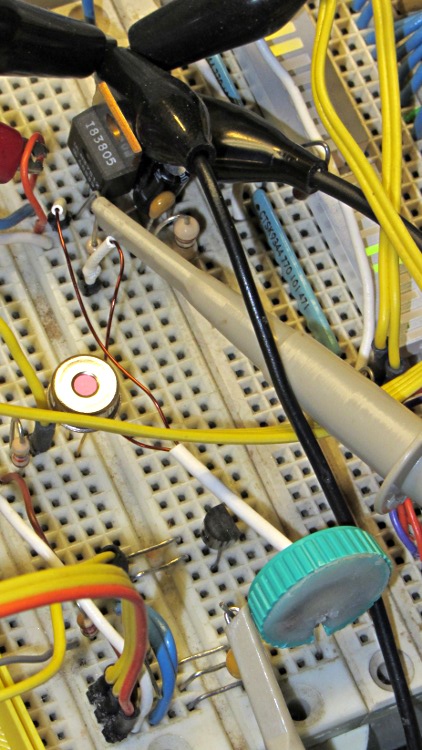
The green ring in the foreground surrounds the toroid, with the slot around the Hall effect sensor sticking up from the breadboard. The toroid cross-section is about the same size as the sensor and the field in the gap seems sufficiently uniform to make positioning completely non-critical. I should conjure up a mount of some sort, just to keep the toroid from flopping around, but that’s definitely in the nature of fine tuning.
Driving a 200 mA peak current into the winding produces a rather noisy result from the Hall sensor:

Applying the oscilloscope’s low pass filter cleans it up a bit:
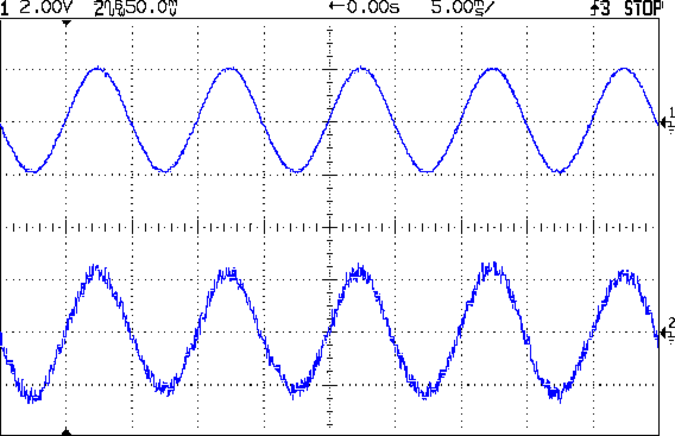
The peak current is 200 mA, so the MMF = 200 mA x 25 turn = 5 A·t.
Assuming μ = 125 and a 0.172 cm gap, then the magnetic flux works out to:
(0.4 π · 125 · 5) / (3.02 + 125 · 0.172) = 7.21 · 5 = 32 G
The Hall effect sensor specs are, at best, hazy, but something like 1.0 to 1.7 mV/G appears on most of the datasheets, with a nominal 1.4 mV/G. The measured peak voltage from the Hall sensor is maybe 60 mV, which suggests a nominal B = 43 G with a range from 60 down to 35 G.
Ferrite toroid datasheets give permeability to three or four significant figures, but also admit that the actual value can differ by ±25% from the nominal. However, the air gap dominates the equation, so B varies from 30.8 to 32.8 G over that range of μ.
Assuming that B = 32 G, then the sensor is running just shy of 1.9 mV/G. Perhaps it didn’t quite pass final inspection; it’s not like I’m buying from an authorized distributor or anything.
Anyhow, the results seems close enough to suggest the ferrite toroid and the Hall effect sensor actually do pretty much what they’re supposed to do. I’d have no qualms about calibrating the sensor output from a known current and running with that number…

Comments
2 responses to “Hall Effect Current Sensor: Magnetic Flux Calibration”
[…] « Hall Effect Current Sensor: Magnetic Flux Calibration […]
[…] an upcoming Circuit Cellar column on Hall effect current sensing, I slit another pair of […]