-
Tour Easy Running Lights: Firmware
The optoisolator carrying the Bafang controller’s
LIGHTsignal pulls Pin 2 down to turn the LED on constantly for night riding:if (!Morser.continueSending()) if (digitalRead(PIN_LIGHTMODE) == HIGH) Morser.startSending(); else digitalWrite(PIN_OUTPUT,HIGH); // constantly turn on in headlight modeThat’s the entirety of the program’s
loop()function, so there’s not much to the firmware.Imagine that: a whole computer devoted to sampling an input bit a zillion times a second and persistently setting an output bit:
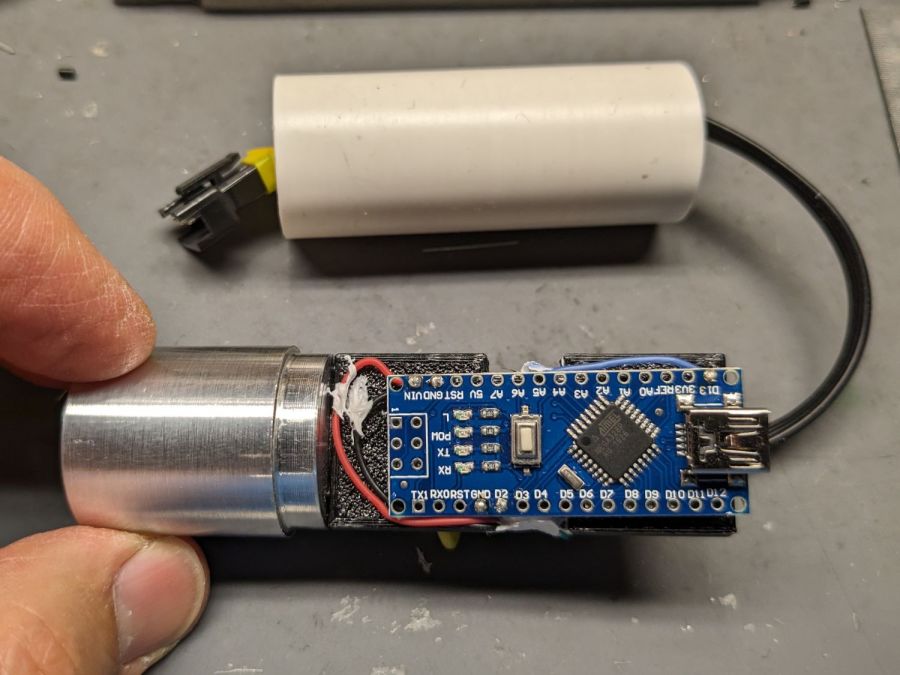
Tour Easy Running Light – Arduino view The Morse output to the rear is now “s” rather than “i” for more blinkiness, but I doubt anybody will ever notice.
The next time I raise the hood on this thing, I’ll add a digital input to select
FRONTorREARmode to get me out of having to remember which hardware goes where.The Arduino source code as a GitHub Gist:
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters// Tour Easy Running Light // Ed Nisley – KE4ZNU // September 2021 // 2023-03 preprocessorize for front/rear lights // https://github.com/markfickett/arduinomorse #include <morse.h> // Bafang headlight output pulls pin low #define PIN_LIGHTMODE 2 #define PIN_OUTPUT 13 #define FRONT #if defined(FRONT) #define BLINKS "b e " #define POLARITY false #elif defined(REAR) #define BLINKS "s " #define POLARITY true #else #error "Needs FRONT or REAR" #endif // second param: true = active low output LEDMorseSender Morser(PIN_OUTPUT,POLARITY,(float)10.0); void setup() { pinMode(PIN_LIGHTMODE,INPUT_PULLUP); Morser.setup(); Morser.setMessage(String("qst de ke4znu ")); Morser.sendBlocking(); Morser.setSpeed(75); Morser.setMessage(String(BLINKS)); } void loop() { if (!Morser.continueSending()) if (digitalRead(PIN_LIGHTMODE) == HIGH) Morser.startSending(); else digitalWrite(PIN_OUTPUT,HIGH); // constantly turn on in headlight mode }
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
