-
HQ Sixteen: Grip Angle Block
The angle block joins the aluminum grip with the plug sticking into HQ Sixteen’s handlebar control base:
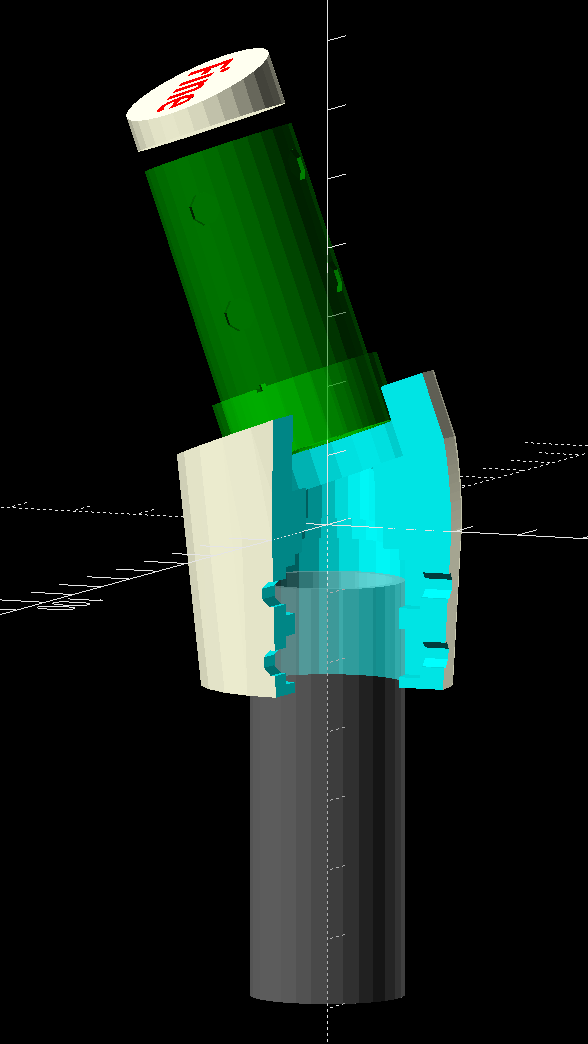
Handlebar Grip Mount – show view – solid model Because I don’t know the exact angle until Mary puts more hours on the machine, the OpenSCAD code can tilt the plug from 10° to 30° with respect to the original grip. The bent part of the model consists of a succession of hulls around adjacent slices:

Handlebar Grip Mount – bend slices – solid model An overall
hull()then gloms everything into one solid lump, with all the negative features removed from it:
Handlebar Grip Mount – show detail – solid model After a brief flirtation with heat-staked brass inserts, four setscrews threaded into steel square nuts secure the original grip in the bottom:

HQ Sixteen – grip angle square nuts A screw behind that big washer pulled the nuts firmly into their sockets, where they stay without any adhesive. The square recesses include a little adder based on the curvature of the hole to sink the nuts deep enough:

Handlebar Grip Mount – nut inset – solid model I made the block’s OD large enough to accommodate the brass inserts and hope it’s chunky enough to withstand the force from the setscrews. The inserts tended to creep outward after being snugged down, but the square nuts seem stable against the recesses.
The block prints with the top surface against the platform to produce a clean recess for the plug, which requires support material for the ring around the bore. Because the ring sags slightly against the support, the model makes the recess 0.4 mm deeper, but the next iteration gets a little more:
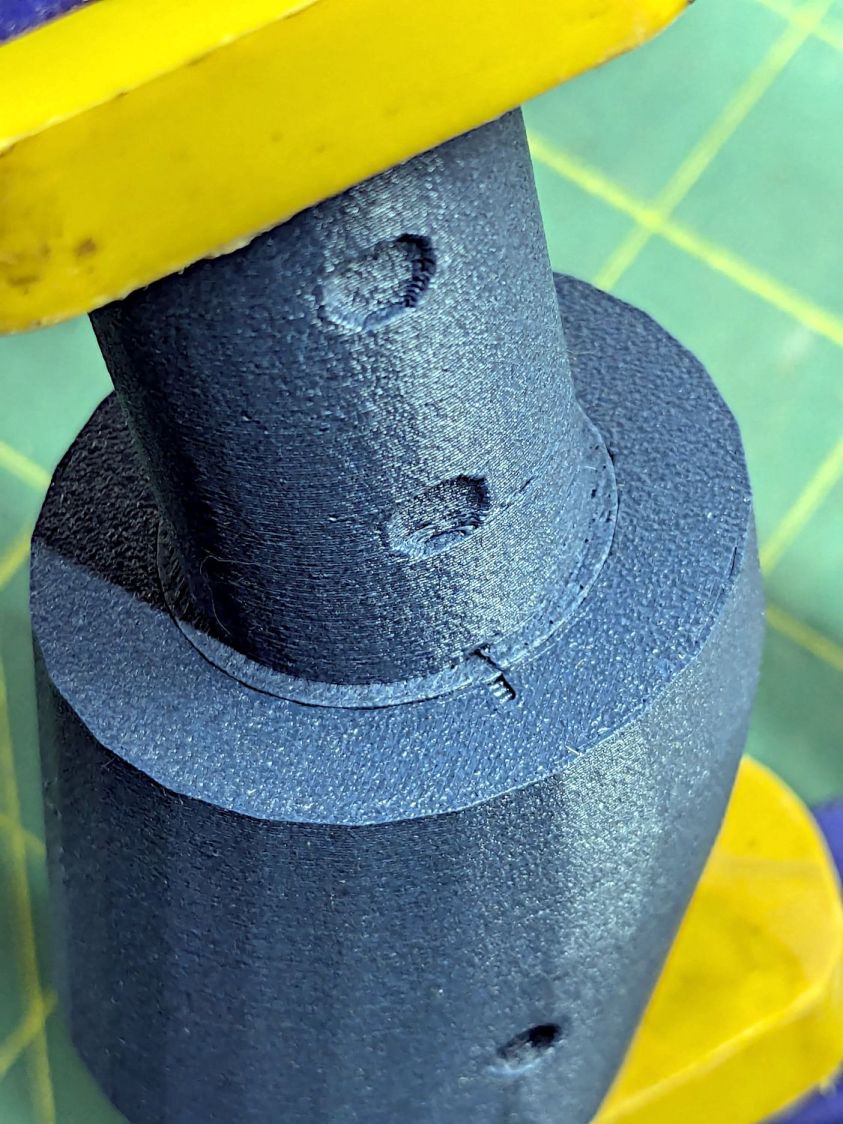
HQ Sixteen – grip angle alignment marks Not that it makes much difference.
The bore from the grip meets the bore from the plug in a sphere centered at the bottom of the plug recess:
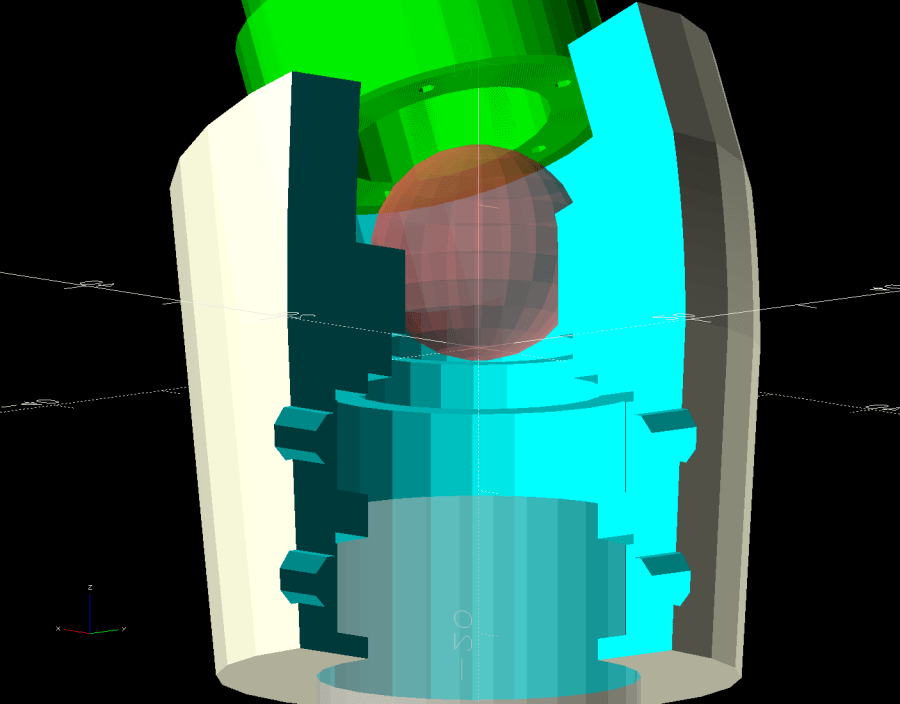
Handlebar Grip Mount – sphere joint – solid model A ball joint seems the best way to join a pair of intersecting cylinders, if you have room for the sphere, and eliminates a whole bunch of computations figuring the cylinder lengths; they just meet at about the center of the sphere and you’re done without anything sticking out. I’d like to pretend that was the first idea I had, but …
The OpenSCAD code can add more length to the bottom of the block, in the event Mary wants the grips lower:

Handlebar Grip Mount – added length – solid model That obviously increases the lever arm applied to the plug, but we’ll burn that bridge when we come to it.
This lineup shows the progression from the first pass to something that might actually work:

HQ Sixteen – grip angle block evolution Rapid prototyping FTW!
The OpenSCAD source code as a GitHub Gist:
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters// Handiquilter HQ Sixteen front handlebar grip angle mount // Ed Nisley – KE4ZNU // 2024-11-29 include <BOSL2/std.scad> Layout = "Show"; // [Show,Build,Plug,Block,Covers,Cover] Material = "All"; // [All,Cover,Text] // Angle w.r.t. base GripAngle = 20; // [10:30] // Plug glued, not screwed PlugGlue = true; // Square nuts, not inserts SquareNuts = true; // Additional length of bottom AddLength = 0; // [0:20] // Separation in Show display Gap = 5; // [0:20] /* [Hidden] */ HoleWindage = 0.1; Protrusion = 0.1; NumSides = 2*3*4; ID = 0; OD = 1; LENGTH = 2; Grip = [19.7,22.4,20.0]; // (7/8)*INCH = 22.2 mm + roughness, LENGTH=OEM insertion depth GripRadius = Grip[OD]/2; // used everywhere Plug = [15.0,Grip[OD],45.0]; // inserts into handlebar base PlugRim = [Plug[ID],25.0,10.0]; // … sits against handlebar base BaseScrewPositions = [[11.0,12.0],[27.0,29.0]]; // setscrew offsets from rim top: side,rear BaseCutout = [Plug[OD]/2,Plug[ID],10]; // cable cutout into base BaseCutoutOffset = 18.0; // … centerline position w.r.t. rim WallThick = 7.0; // should at least fit insert length SupportSag = 0.4; // vertical sag over support structure MidLength = AddLength + 3.0; // total length allowing for grip tube stop TopOD = PlugRim[OD] + 2*WallThick; BotOD = Grip[OD] + 2*WallThick; BaseScrew = [4.0,4.8 + HoleWindage,1.0]; // HQ 10-32 screws, LENGTH=capture dent Insert = [5.4,6.0,6.0]; // M4 inserts in plug rim //Insert = [4.0,5.0,5.0]; // M4 inserts in plug rim Screw = [3.5,4.0,1]; // M4 screws through angle block to inserts ScrewHeadOD = 7.4 + 0.4; // M4 BHCS head + comfort SquareNut = [4.0,7.0,3.0 + 0.4]; // M4 square nut LENGTH + inset allowance NutInset = GripRadius – sqrt(pow(GripRadius,2) – pow(SquareNut[OD],2)/4); PinOD = 1.2; // plug reinforcing pins NumPins = 5; CoverThick = [3.5,9.5]; // low and high sides of grip covers CoverAngle = atan((CoverThick[1] – CoverThick[0])/Plug[OD]); LogoText = ["Sew","Fine"]; LogoFont = "Fira Sans Condensed:style=SemiBold"; LogoSize = 7.5; LogoColor = "Red"; LogoThick = 0.8; //———- // Simulator for aluminum plug replacing handlebar in base module BasePlug() { difference() { union() { tube(Plug[LENGTH],(Plug[OD] – HoleWindage)/2,Plug[ID]/2,anchor=DOWN); tube(PlugRim[LENGTH],PlugRim[OD]/2,PlugRim[ID]/2,anchor=DOWN); } up(BaseCutoutOffset + PlugRim[LENGTH]) left(Plug[OD]/4) resize(BaseCutout) yrot(90) zrot(180/8) cylinder(d=1,h=1,$fn=8,center=true); up(PlugRim[LENGTH]) right(PlugRim[OD]/2 – 1.0) cube([2.0,1.0,1.0],center=true); for (i = [0:NumPins – 1]) zrot(i*360/NumPins + 180/NumPins) down(Protrusion) right((Plug[OD] + Plug[ID])/4) zrot(180/6) cylinder(d=PinOD,h=2*PlugRim[LENGTH],$fn=6); for (k = [0:1]) // recesses in plug to capture base setscrews for (a = [0:1]) up(PlugRim[LENGTH] + BaseScrewPositions[k][a]) zrot(a*90) right(Plug[OD]/2) yrot(90) zrot(180/8) cylinder(d=BaseScrew[OD],h=2*BaseScrew[LENGTH],$fn=8,center=true); if (!PlugGlue) for (a = [0:1]) // inserts for angle block screws up(PlugRim[LENGTH]/2) zrot(a*90) yrot(90) zrot(180/8) cylinder(d=Insert[OD],h=2*PlugRim[OD],$fn=8,center=true); } } //———- // Block fitting against handlebar base with handlebar angle module AngleBlock() { difference() { hull() { up((TopOD/2)*sin(GripAngle)) xrot(GripAngle) cylinder(d=TopOD,h=PlugRim[LENGTH],$fn=NumSides); for (a = [1:2:GripAngle+1]) up((TopOD/2)*sin(a-1)) hull() { xrot(a) cylinder(d=TopOD,h=0.1,$fn=NumSides); xrot(a-1) cylinder(d=TopOD,h=0.1,$fn=NumSides); } down(Grip[LENGTH] + MidLength) cylinder(d=(Grip[OD] + 2*WallThick),h=0.1,$fn=NumSides); } up((TopOD/2)*sin(GripAngle)) xrot(GripAngle) down(SupportSag) cylinder(d=(PlugRim[OD] + HoleWindage), h=PlugRim[LENGTH] + SupportSag + Protrusion, $fn=NumSides); up((TopOD/2)*sin(GripAngle)) sphere(d=PlugRim[ID],$fn=NumSides); cylinder(d=PlugRim[ID],h=(TopOD/2)*sin(GripAngle),$fn=NumSides); down(MidLength + Protrusion) cylinder(d=(Grip[ID] – 2.0),h=(MidLength + 2*Protrusion),$fn=NumSides); down(Grip[LENGTH] + MidLength + Protrusion) cylinder(d=(Grip[OD] + HoleWindage),h=(Grip[LENGTH] + Protrusion),$fn=NumSides); up((TopOD/2)*sin(GripAngle)) xrot(GripAngle) up(PlugRim[LENGTH]) right(PlugRim[OD]/2 + 0.9) cube([2.0,1.0,1.0],center=true); if (!PlugGlue) { for (a = [0:1]) up((TopOD/2)*sin(GripAngle)) xrot(GripAngle) up(PlugRim[LENGTH]/2) zrot(a*90) yrot(90) zrot(180/8) cylinder(d=Screw[OD],h=3*PlugRim[OD],$fn=8,center=true); for (a = [0:3]) up((TopOD/2)*sin(GripAngle)) xrot(GripAngle) up(PlugRim[LENGTH]/2) zrot(a*90) right(TopOD/2 – 2.0) yrot(90) zrot(180/8) cylinder(d=ScrewHeadOD,h=TopOD,$fn=8,center=false); } if (SquareNuts) { for (a = [0:1]) for (k = [1,3]) down(k*Grip[LENGTH]/4 + MidLength) zrot(a*90) right(BotOD/2) yrot(90) zrot(180/8) cylinder(d=SquareNut[ID],h=BotOD,$fn=8,center=true); for (a = [0:1]) for (k = [1,3]) down(k*Grip[LENGTH]/4 + MidLength) zrot(a*90) right(GripRadius + SquareNut[LENGTH]/2 – NutInset/2) yrot(90) cube([SquareNut[OD],SquareNut[OD],SquareNut[LENGTH] + NutInset],center=true); } else { for (a = [0:1]) for (k = [1,3]) down(k*Grip[LENGTH]/4 + MidLength) zrot(a*90) right(BotOD/2) yrot(90) zrot(180/8) cylinder(d=Insert[OD],h=BotOD,$fn=8,center=true); } } } //———- // Chip fitting against handlebar base matching top angle // Text will be invisible until sliced module GripCover(loc=LEFT,matl="Cover") { if (matl == "Text" || matl == "All") color(LogoColor) down(matl == "All" ? 0.01 : 0.0) text3d(LogoText[loc == LEFT ? 0 : 1],LogoThick,LogoSize,LogoFont, orient=DOWN,anchor=TOP,atype="ycenter"); if (matl == "Cover" || matl == "All") difference() { intersection() { yrot(loc == RIGHT ? -CoverAngle : CoverAngle) cylinder(d=Plug[OD],h=(CoverThick[0] + CoverThick[1]),anchor=CENTER); cube(2*Plug[OD],anchor=BOTTOM); } text3d(LogoText[loc == LEFT ? 0 : 1],LogoThick,LogoSize,LogoFont, orient=DOWN,anchor=TOP,atype="ycenter"); } } //———- // Build things if (Layout == "Cover") { GripCover(LEFT,Material); } if (Layout == "Covers") { left(Plug[OD]) GripCover(LEFT,"Cover"); left(Plug[OD]) GripCover(LEFT,"Text"); right(Plug[OD]) GripCover(RIGHT,"Cover"); right(Plug[OD]) GripCover(RIGHT,"Text"); } if (Layout == "Plug") BasePlug(); if (Layout == "Block") AngleBlock(); if (Layout == "Show") { up((TopOD/2)*sin(GripAngle) + Protrusion) xrot(GripAngle) up(Plug[LENGTH] + CoverThick[1] + Gap) yrot(180 + CoverAngle) GripCover(RIGHT,"All"); up((TopOD/2)*sin(GripAngle) + Protrusion) xrot(GripAngle) up(Gap) color("Lime",0.75) BasePlug(); render() difference() { AngleBlock(); back(50) right(50) cube(100,center=true); } color("Silver",0.5) down(MidLength + Gap) tube(3*Grip[LENGTH],GripRadius,Grip[ID]/2,anchor=TOP); } if (Layout == "Build") { mirror_copy([1,0,0]) { right(BotOD) { up((TopOD/2)*sin(GripAngle) + PlugRim[LENGTH]*cos(GripAngle) + Protrusion) xrot(180 – GripAngle) AngleBlock(); back(1.5*max(TopOD,BotOD)) BasePlug(); } } fwd(60) { left(Plug[OD]) GripCover(LEFT,"Cover"); right(Plug[OD]) GripCover(RIGHT,"Cover"); } fwd(60) { left(Plug[OD]) GripCover(LEFT,"Text"); right(Plug[OD]) GripCover(RIGHT,"Text"); } }
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
